

Основы теории автоматического регулирования

Выходной параметр объекта управления y измеряется первичным измерительным преобразователем ПИП, который преобразует сигнал в форму для дальнейшей обработки и передачи данных. Cигнал от ПИП поступает на нормирующий преобразователь или вторичный прибор НП который необходим для преобразования сигнала в виде удобного для его … и дистанционной передачи этого сигнала. Параметр yoc поступает на элемент сравнения ЭС, то есть устройство, в котором связывается входной и выходной параметр и происходит сравнение величины входной x с выходной величиной yoc и определяется ошибка регулирования e которое называется рассогласованием. Рассогласование e подается на автоматический регулятор АР, который в зависимости от ошибки e и заложенного в него алгоритма регулирования вырабатывает управляющее воздействие УАР, и передаёт это воздействие на исполнительное устройство. Исполнительное устройство состоит из исполнительного механизма и регулирующего органа которые необходимы для преобразования сигнала регулирования в положение выходного звена регулирующего органа. Регулирующий орган изменяет материальный и энергетические потоки для определения входной величины Y с объекта управления с целью поддержания ее на заданном уровне, то есть y = x. Таким образом e (ошибка регулирования) будет стремиться к нулю.
Схемы автоматического регулирования бывают разомкнутые и замкнутые.
В системах разомкнутого регулирования - система не знает результата, его знает только оператор.
В системах замкнутого регулирования - результат регулирования передается на вход системы регулирования при помощи устройств обратной связи.
Виды обратной связи:
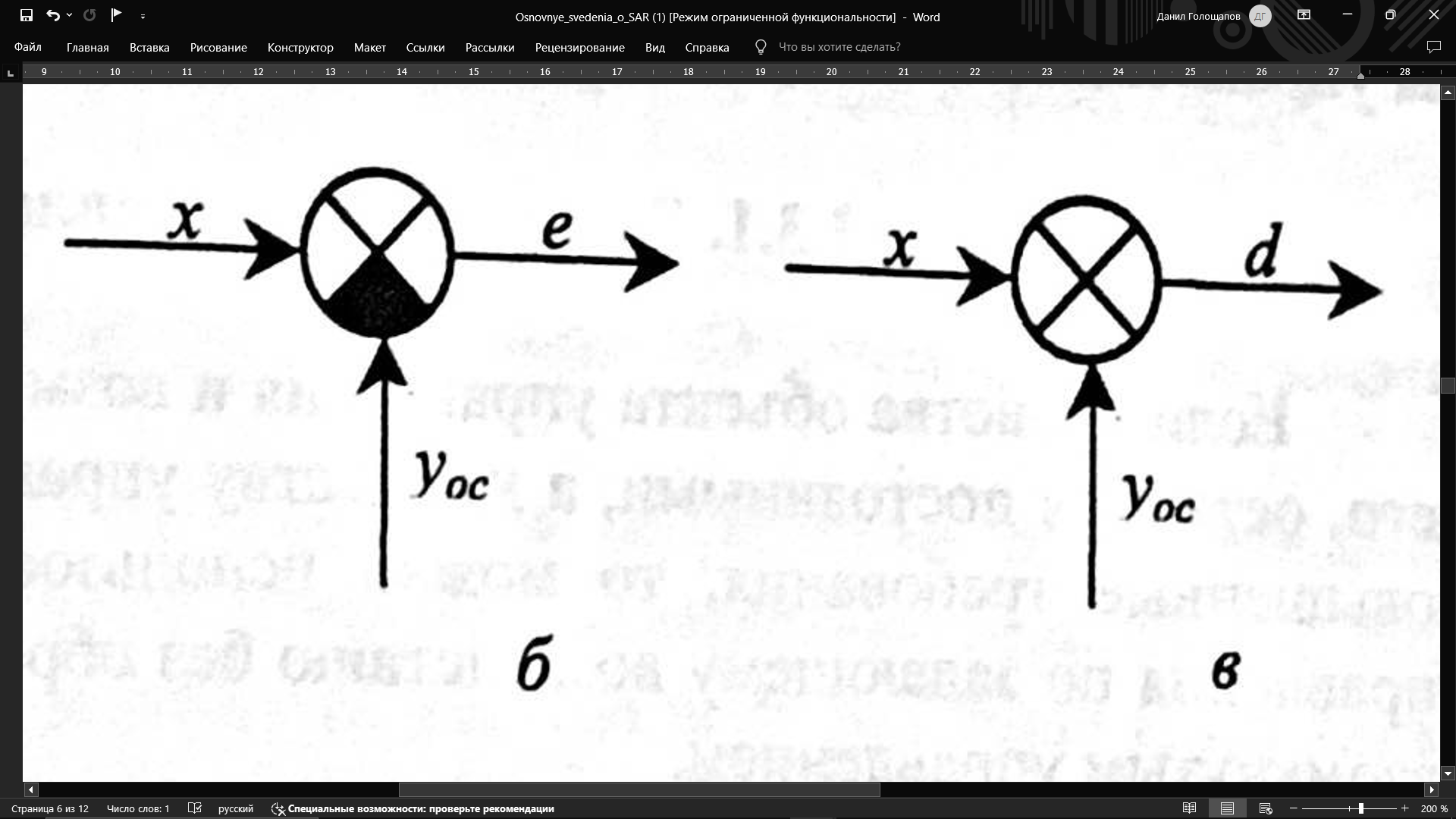
Системы обратной связи могут быть либо положительными (рис. правый), либо отрицательными (рис. левый), и отличаются лишь способом суммирования.
Отрицательная обратная связь - обратный сигнал (yoc) вычитается из входного сигнала (x) e = x - yoc
Положительная обратная связь - обратный сигнал (yoc) суммируется с входным сигналом (x) d= x + yoc
Схемы автоматического регулирования делят на три категории:
Системы разомкнутого управления
Системы по возмущению
Системы по регулирования
С истема разомкнутого управления
При разомкнутом управлении устройство управления УУ вырабатывает сигнал u, который поступает на исполнительные элементы объекта управления ОУ. На вход управляющего устройства подаётся сигнал задания (x). Задание формируется оператором, на основании полученных от системы данных. При наличии в системе неизвестных возмущений разомкнутый тип управления невозможен.

Пример разомкнутого регулирования температуры сушильного шкафа
С истема управления по возмущению
С истема,
действующая по возмущению, должна
компенсировать определённое измеренное
возмущение, то есть формирование
управляющего воздействия будет в
соответствии с заданием x
и измеренным возмущением f
действующей на объект управления. Для
достижения ___________________применяется
корректирующее звено, такой тип систем
является замкнутым. В качестве возмущающих
воздействий можно отнести колебания
параметров сырья, параметры окружающей
среды, а также режимы работы технологического
оборудования. Такой тип системы управления
нельзя использовать при невозможности
измерения возмещения или его неизвестности.
истема,
действующая по возмущению, должна
компенсировать определённое измеренное
возмущение, то есть формирование
управляющего воздействия будет в
соответствии с заданием x
и измеренным возмущением f
действующей на объект управления. Для
достижения ___________________применяется
корректирующее звено, такой тип систем
является замкнутым. В качестве возмущающих
воздействий можно отнести колебания
параметров сырья, параметры окружающей
среды, а также режимы работы технологического
оборудования. Такой тип системы управления
нельзя использовать при невозможности
измерения возмещения или его неизвестности.
Пример системы управления температурой в теплообменнике по возмущению