

Коломенский институт (филиал)
федерального государственного бюджетного образовательного учреждения высшего образования
«МОСКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра автоматизации производства и информационных
технологий
ДИСЦИПЛИНА Основы робототехники
Романов П.С.
Лекция
Тема 2. Интеллектуальные роботы
Занятие 2. Системы обработки сенсорной информации, определяющие
параметры внешней среды
Коломна – 2020 г.
Вопрос 1. Интеллектуальные роботы: задачи, схема, области
применения
Интеллектуальные роботы – это поколение роботов, возникшее в рамках адаптивных роботов и затем выделившееся в самостоятельное качественно новое поколение.
Интеллектуальные роботы (ИР) - это роботы, для обеспечения, функционирования которых и выполнения определенных технологических операций используется искусственный интеллект (ИИ). В целом искусственный интеллект используется в роботах для повышения качества выполнения следующих задач:
обработка сенсорной информации;
оценка внешней ситуации;
принятие решений по адекватному поведению;
планирование поведения;
управление движениями по реализации этих планов.
создание интеллектуальных интерфейсов для взаимодействия с человеком-оператором и другими роботами и совместно действующим оборудованием.
Применение ИИ для выполнения некоторых второстепенных вспомогательных функций, не относящихся к основному назначению робота, не дает основания считать его интеллектуальным. Так, сварочный промышленный робот является интеллектуальным, если ИИ используется для выполнения операций сварки. Если же эти операции выполняются, например, программно, но при этом ИИ используется в системах энергопитания, связи с оператором и т.п., такой робот остается по определению роботом с программным управлением.
Основные области применения интеллектуальных роботов – это именно выполнения таких сложных операций, которые требуют интеллектуального подхода при решении выше перечисленных задач.
На рис. 1 (см. рис.7 лекции 2-1) показана обобщенная схема интеллектуального робота, которая поясняет сферы применения ИИ в системах робота.
В центре схемы находится блок памяти, двусторонне связанный с другими системами, перерабатывающими информацию. В блок памяти входит база знаний о внешней среде в виде ее модели, база данных о внешней среде («модель мира»), самом роботе и об операциях, которые он может выполнять. Кроме того, специализированные оперативные базы знаний и данных, связанные с центральной памятью, могут находиться и в отдельных системах робота.
База знаний о внешней среде содержит априорную информацию, вводимую до начала работы, и оперативную сенсорную информацию, которая приобретается в процессе восприятия окружающей среды при выполнении роботом заданных действий, а также в процессе его специальных познавательных действии для изучения этой среды. Сама информация включает в себя описание геометрических и других физических характеристик объектов среды и их взаимосвязи. Это описание имеет иерархическую структуру. Например, описание рабочей зоны манипулятора включает набор планов этой зоны и ее частей, различающихся как масштабом и соответственно точностью, так и степенью обобщения первичной сенсорной информации (выделение контуров, поверхностей, объектов, групп объектов, определение различных свойств и физико-химических параметров этих объектов и т.д.).
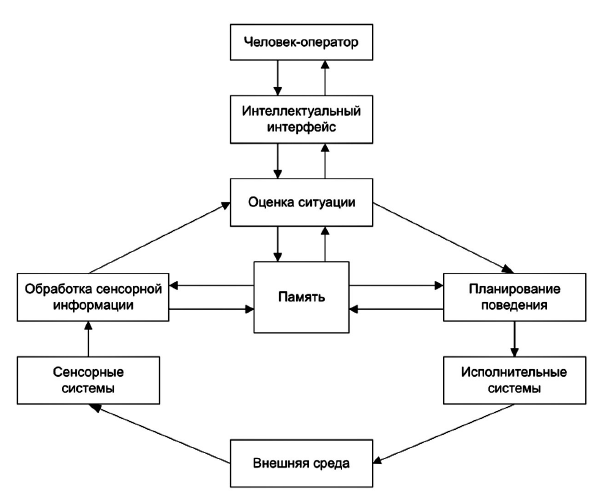
Рис. 1. Функциональная схема интеллектуального робота
Введение в эти планы времени как параметра дает картину внешней среды в динамике с учетом взаимодействия ее объектов друг с другом и с роботом. База знаний о внешней среде содержит также правила, позволяющие моделировать возможные изменения этой среды. Сами знания представляются в виде логических и сетевых моделей среды. Наличие памяти с эффективно используемой базой знаний - обязательный признак интеллектуального робота, как, впрочем, и любой другой системы ИИ.
Все другие блоки схемы также имеют иерархическую структуру, уровни которой соединены друг с другом по вертикали снизу вверх. В свою очередь, показанные на схеме соединения блоков в общем случае осуществляются многоканально между одноименными уровнями по горизонтали.
Блок обработки сенсорной информации получает из блока памяти экстраполяцию изменений состояния внешней среды, а передает в него коррекцию этого состояния на уровне непосредственной сенсорной картины среды.
Блок оценки ситуации и блок планирования поведения получают из блока памяти текущую модель внешней среды, а передают в него соответственно ее оценку по определенным критериям и синтезированный план управления движением робота. Важная функция этих блоков - осуществление самообучения, т.е. профессионального самоусовершенствования робота в процессе его функционирования.
При синтезе плана поведения используются различные методы решения связанных с этим задач, разработанные в рачках искусственного интеллекта, в том числе:
поиск решения в пространстве состояний {нахождение последовательности преобразования исходного состояния в конечное целевое);
сведение задачи к подзадачам (последовательное разбиение задачи на подзадачи вплоть до элементарных, решение которых известно);
решение в форме доказательства теорем {формулирование задачи как теоремы и ее решение (доказательство) на базе системы аксиом).
В задачу блока оценки ситуации входит также оперативная корректировка целей управления и их приоритетов. Это верхний интеллектуальный уровень в иерархии управления роботом.
Блок интеллектуального интерфейса в общем случае может быть двусторонне связан со всеми перечисленными функциональными блоками.
Как следует и из схемы на рис.1, в структуре интеллектуальных роботов отсутствует в явном виде блок, ответственный за реализацию интеллекта. Искусственный интеллект распределен по функциональным блокам робота в соответствии с функциями, при выполнении которых используются методы искусственного интеллекта.
Важными показателями интеллектуального уровня робота являются уровень обобщения моделей внешней среды, на основании которых происходит оценка конкретных ситуаций и прогнозирование их развития, а также возможности самоусовершенствования, в том числе при активном взаимодействии для этого с внешней средой.
Принципиально существуют несколько путей использования методов ИИ в робототехнике, например:
первый путь - это прямое использование накопленных профессиональных знаний человека. Он реализуется в экспертных системах;
второй путь заключается в воспроизведении «аппаратного» и «программно – алгоритмического» обеспечения естественного интеллекта. К этому пути относятся нейронные сети и ассоциативная память;
третий путь состоит в подходе к человеческому мозгу как к «черному ящику» и изучении и воспроизведении его характеристик «вход-выход» на основе формализуемых математических и лингвистических методов.
Итак, ИР - это робот, в котором в системах обработки сенсорной информации и построения модели внешней среды, оценки ситуации и планировании поведения, управления движением и обучения, а также в интерфейсе «человек-робот» используются основанные на знаниях методы ИИ.
Первые роботы, в которых нашли применение элементы ИИ, появились в 70-е годы прошлого столетия. Методы ИИ первоначально были использованы в системах адаптивного управления «глаз-рука» и в лабораторных так называемых интегральных мобильных роботах для передвижения и манипулирования в неизвестной и меняющейся обстановке. В последнее время к этим проблемам добавились исследования поведения роботов во враждебной ситуации (борьба с террористами и т.п.) и группового поведения роботов, в том числе в конфликтных ситуациях противоборства: разрабатываются соответствующие робототехнические системы. Групповое применение интеллектуальных роботов предполагает создание и развитие соответствующего коллективного интеллекта. Это будет высшей формой ИИ, аналогичного в этом смысле интеллекту человеческих коллективов со специализацией отдельных членов коллектива и иерархической структурой.
Основная тенденция развития перспективного аппаратного обеспечения интеллектуальных компонентов ИР - сенсорных, информационно-управляющих и исполнительных (силовых) - это миниатюризация на базе трехмерных микросистемных технологий. На этой же основе возникла и быстро развивается микроробототехника, а в более далекой перспективе и наноробототехника, которые невозможны без развитого ИИ.
Области применения интеллектуальных роботов. Хотя мечта об интеллектуальных и даже человекоподобных роботах возникла задолго до появления современной робототехники, основной стимул развития ИР - это, разумеется, прежде всего реальные потребности в таких роботах сегодня и в ближайшем будущем. Однако чтобы эти потребности оформились в реальные технические требования, робототехника должна была пройти длительный путь развития, включая очувствление роботов, развитие уровней адаптивного управления, отработку первых «элементов искусственного интеллекта» при решении отдельных задач обработки сенсорной информации, формирования нечетких моделей внешней среды, принятия на этой основе решений о действиях и управления собственно движением.
В соответствии с рассмотренными выше возможностями ИР в настоящее время они востребованы прежде всего для работы в экстремальных ситуациях, когда существует наибольшая неопределенность не только во внешних условиях, но И в подлежащих выполнению операциях, включая идентификацию этих условий, оперативное принятие решений об адекватных действиях и, наконец, их выполнение при минимальном участии человека-оператора.
К областям применения ИР, соответствующим такого типа ситуациям, относится космос и глубины океана, выполнение боевых и близких им наземных операций. Актуальная область применения ИР - обеспечение функционирования беспилотных летательных аппаратов, других типов безэкипажных мобильных объектов, а также их коллективов, в том числе в конфликтных ситуациях.
Наряду с этими областями применения ИР, где уже сегодня определились достаточно крупные потребности, которые позволят организовать промышленный выпуск таких роботов, все более значимой становится задача разработки других типов различных ИР, потребность в которых (по крайней мере сначала) измеряется малыми партиями вплоть до нескольких единиц (например, сварочные центры для выполнения сложных сварочных операций, мобильные роботы для поиска и изъятия радиоактивных источников, взрывчатки и т.п., персональные сервисные роботы). Трудность удовлетворения таких потребностей связана с тем, что проектирование, изготовление и отработка в эксплуатации таких сложных роботов в единичных экземплярах экономически не могут быть рентабельными. Основным средством для удовлетворения таких потребностей и развития рынка ИР является модульный принцип их построения из унифицированных функциональных компонентов.
В процессе создания ИР отрабатываются принципы и методика проектирования, а также принципы применения таких роботов, оптимальное взаимодействие с ними человека-оператора. В ходе этого процесса и будут окончательно сформированы области применения ИР и потребности в них.