

Коломенский институт (филиал)
федерального государственного бюджетного образовательного учреждения высшего образования
«МОСКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра автоматизации производства и информационных
технологий
ДИСЦИПЛИНА Основы робототехники
Романов П.С.
Лекция
Тема 2. Интеллектуальные роботы
Занятие 1. Модель мышления человека и искусственный интеллект
в робототехнике
Коломна – 2020 г.
Вопрос 1. Тенденции развития робототехники
Робототехника наряду с совершенствованием своих специфических характеристик развивается, прежде всего, в русле общих тенденций развития техники в целом. На рубеже XXI века все большее значение стали приобретать две тенденции - миниатюризация и интеллектуализация изделий.
Тенденции эти тесно взаимосвязаны. Само понятие интеллектуализации (искусственного интеллекта) могло возникнуть и приобрести реальный смысл только на определенном этапе развития миниатюризации, прежде всего в вычислительной технике. Проблема интеллектуализации изделий возникла, прежде всего, именно в робототехнике, поскольку это соответствовало исходной идее робота. Процесс миниатюризации изначально был предопределен процессом повышения точности и разрешающей способности создаваемых изделий. Именно последнее является основанием для создания все более малоразмерных изделий.
Процесс миниатюризации, помимо возможности создания все более малоразмерных мини-, микро- и наносистем, создает техническую базу для разработки нового поколения и крупномасштабных объектов вплоть до тяжелого машиностроения, обладающих принципиально новыми, в том числе интеллектуальными функциональными возможностями и техническими характеристиками.
К 2000 г. в мире произошел переход к созданию следующего поколения мобильных роботов. Это интеллектуальные роботы с автономной системой навигации и передвижения в заранее неопределенной среде и с интерактивным управлением от оператора через интеллектуальный интерфейс.
Одновременно начали разворачиваться поисковые разработки по миниатюризации этих роботов - созданию мобильных мини- и микророботов, основанных на принципиально новых движителях.
В последнее время резко возросло значение так называемой проблемы «человеческого фактора» в человеко-машинных системах и важную роль в ее решении робототехники - прежде всего интеллектуальных роботов. Проблема симбиоза человека и современной техники обострилась в связи с быстро растущим несоответствием между усложняющейся техникой и остающимися, по существу, неизменными возможностями участвующего в ее функционировании человека. Подтверждением этому служит рост аварий по вине персонала, в том числе с наиболее совершенными объектами. В настоящее время основным ограничивающим фактором для эффективного решения проблемы путем замены человека роботом является недостаточный интеллект роботов. Наиболее важно преодолеть это ограничение для наукоемкой техники нового поколения, особенно для работающей в экстремальных внешних условий. Это, прежде всего, беспилотные летательные аппараты, безэкипажные космические, подводные и наземные, в том числе и военные объекты.
Рассматриваемый процесс миниатюризации и интеллектуализации техники начинается прежде всего с ее основных компонентов: трех замкнутых в кольцо через внешнюю среду сенсорных, информационно-управляющих и исполнительных компонентов, затем компонентов связи и энергопитания (рис.1).

Рис.1. Функциональный состав автоматических систем
В общем случае их совокупность образует открытую систему, информационно и энергетически зависимую от окружающей среды, включая и другую подобную технику в недалеком будущем в виде коллективов роботов.
В основе миниатюризации этих компонентой лежит повышение точности изготовления деталей (рис. 2). В этом процессе развития техники по-прежнему лидирует вычислительная техника на базе микроэлектроники. Это, прежде всего, информационно-управляющие компоненты, а за ними с определенным отставанием следует сенсорика и связь. Их общая база - 2D микротехнологии. Начавшийся качественный переход к 3D микросистемным технологиям микроэлектромеханических систем (МЭМС) особенно важен для сенсорики, а еще более для силовых компонентов исполнительных и энергопитания (общесистемное развитие пока сдерживают последние). Здесь происходит возврат к проблеме миниатюризации механики движений. Пока эти компоненты все еще продолжают эволюционировать на идеях прошлых веков, но общая тенденция очевидна: технологическое сближение всех компонентов и их конструктивное объединение в мехатронные системы. Подобно тому, как микроэлектроника, возникнув в виде отдельных транзисторов, диодов и других элементов, перешла к объединению этих элементов во все более крупные интегральные схемы в виде чипов, эволюция МЭМС также развивается в направлении создания все более крупных технических систем, объединяющих все рассмотренные выше функциональные компоненты в единый мехатронный конструктив. Дальнейшая миниатюризация ведет к переходу на новый наноуровень молекулярной размерности и соответственно к аналогичному укрупнению интегральных наноэлектромеханических систем (НЭМС).
Актуальные задачи по созданию перечисленных ранее компонентов нового поколения техники применительно к робототехнике.
Для сенсорных систем первоочередная задача - комплексирование сенсорных систем различного типа (СТЗ, УЗ, ИК, УФ, радиотехнических и лазерных дальномеров и т.д.). Необходимо также развивать химические сенсоры, что, в частности, важно для поиска взрывчатки, наркотиков, и более специальные – интроскопические.
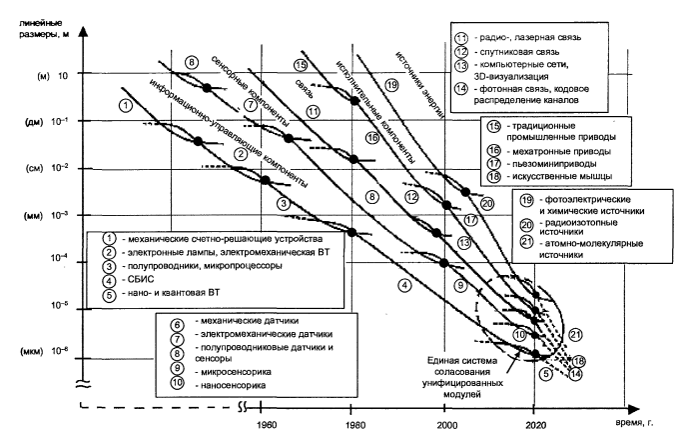
Рис. 2. Развитие компонентов технических систем:
1 - механические счетно-решающие устройства; 2 - электронные лампы, - электромеханическая ВТ; 3 - полупроводники, микропроцессоры; 4 - СБИС; 5 - нано- и квантовая ВТ; 6 - механические датчики; 7 - электромеханические датчики; 8 - полупроводниковые датчики и сенсорные системы; 9 – микродатчики и сенсорика; 10 - нанодатчики и сенсорика; 11 - радио-, лазерная связь; 12 - спутниковая связь; 13 -компьютерные сети, 3D визуализация; 14 - фотонная связь, кодовое распределение каналов; 15 - традиционные промышленные приводы; 16 - мехатронные приводы; 17-пьезоминиприводы; 18 –искусственные мышцы; 19 - фотоэлектрические и химические источники; 20 - радиоизотопные источники; 21 - атомно-молекулярные источники
Для информационно-управляющих компонентов наряду с дальнейшим развитием формализуемых символьных технологий ИИ предстоит приступить к решению проблемы создания образных методов работы с информацией.
Для связи применительно к робототехнике одна из важных проблем - это связь «оператор-робот»; ее задачи:
3D виртуальные обобщенные сцены внешней среды;
эффект присутствия;
неконтактные способы управления (отказ от джойстиков как основного средства) через 3D картины внешней среды, включая управление голосом, световыми метками и т.п.
К силовым компонентам (исполнительным и энергопитания) в отличие от других компонентов предъявляются другие основные требования - КПД и удельные массогабаритные параметры. Эти компоненты уже прекратили свое эволюционное развитие. Во всем мире идет поиск на базе 3D технологий принципиально новых решений (типа искусственных мышц и т.п.).