

Коломенский институт (филиал)
федерального государственного бюджетного образовательного учреждения высшего образования
«МОСКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра автоматизации производства и информационных
технологий
ДИСЦИПЛИНА Основы робототехники
Романов П.С.
Лекция
Тема 2. Интеллектуальные роботы
Занятие 7. Интеллектуальное управление движением роботов
Коломна – 2020 г.
Вопрос 1. Использование технологии экспертных систем для
управления движением роботов
После получения и обработки сенсорной информации о внешней среде и формирования на этой основе модели этой среды следующим этапом в процессе интеллектуального управления роботом является оценка текущей ситуации путем сопоставления задач, подлежащих решению, с состоянием внешней среды и собственно робота и принятия решения об адекватном поведении робота, которое затем должно быть реализовано в виде плана управления транспортными и манипуляционными движениями робота.
Движение робота осуществляется путем управления приводами его манипуляционной и транспортной исполнительных систем, обеспечивающих требуемое перемещение. Известно, что функциональные возможности большинства известных систем программирования роботов и управления их движением ограничиваются «жесткими» алгоритмами с фиксированным порядком выполнения параметризованных операций, которые определяют сценарии поведения в тех или иных условиях. Вместе с тем успехи в развитии теории искусственного интеллекта и смежных научных дисциплин открывают перспективы для реализации гибких механизмов планирования действий и управления движением роботов различных типов на основе использования современных методов и технологий обработки знаний.
Продуктивность этого направления интенсивно исследуется, в частности, применительно к экспертным системам (ЭС) для следующих приложений:
для диагностики, планирования и контроля за процессами функционирования специализированного технологического оборудования, используемого в составе робототехнических комплексов;
для координации и планирования целенаправленных перемещений мобильных роботов;
для управления движениями и планирования действий манипуляторов роботов.
Основу построения интеллектуальных роботов на базе технологии ЭС составляют три ключевых положения:
организация управления роботом по иерархическому принципу;
включение в иерархию управления стратегической системы планирования повеления, тактической системы формирования движений, исполнительной системы приводного уровня и системы очувствления;
узловое звено каждого из элементов иерархической управляющей структуры - соответствующая проблемно-ориентированная ЭС, обеспечивающая интеллектуализацию выполняемых функций.
Эти положения позволяют регламентировать функциональное назначение ЭС в составе отдельных уровней управления. Так, ЭС нижнего приводного уровня должна обеспечивать активную адаптацию к изменениям нагрузки, испытываемой соответствующими степенями подвижности, к вариациям параметров самого электропривода, а также настройку регулятора на требуемые характеристики привода, задаваемые тактическим уровнем управления.
ЭС тактического уровня должна осуществлять планирование пространственных перемещений робота в среде с препятствиями с учетом динамики исполнительных систем и текущих возмущающих воздействий различного характера, обеспечивая реализацию движений по задаваемым траекториям или по направлению к заданному целевому положению.
ЭС верхнего уровня отвечает за планирование целесообразного поведения робота и связана с решением задач выбора стратегии выполнения задания, формирования соответствующей последовательности действий, а также оперативной коррекции синтезированных планов в зависимости от изменений во внешней среде.
Применительно к организации интеллектуального управления роботами практическое воплощение данной концепции на тактическом уровне предполагает разработку специализированной ЭС, структура которой включает следующие компоненты (рис.1):
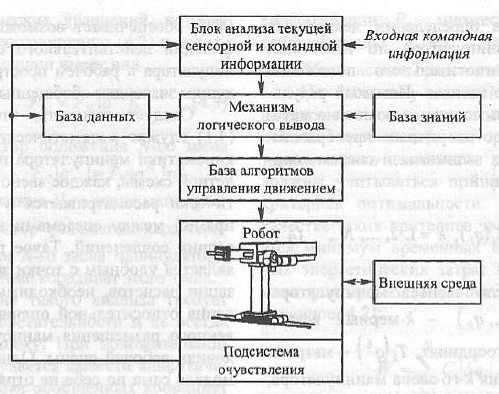
Рис. 1. Обобщенная структура ЭС тактического уровни управления
интеллектуальным роботом
анализ текущей ситуации по результатам обобщения и интерпретации входного комплекса командной и сенсорной информации;
базу алгоритмов управления движением робота;
базу данных, определяющих цели и задачи управления роботом, конструктивно-технические характеристики и текущее состояние его функциональных систем;
базу знаний о манипуляционных возможностях робота и об алгоритмах, хранящихся в базе алгоритмов;
механизм логического вывода, порождающий экспертные заключения по управлению роботом.
Кроме того, поскольку одним из атрибутов интеллектуальности любой системы является способность к накоплению собственного опыта и пополнению знаний, важное значение приобретает задача разработки механизмов самообучения.
Сложность и комплексный характер проблемы построения тактического уровня управления роботами на базе технологии ЭС обуславливает необходимость ее поэтапного решения. Начальным шагом в создании ЭС тактического уровня управления интеллектуальным роботом являются задачи планирования перемещений манипулятора в среде с препятствиями.
Решение этого типа задач связано с задачами кинематического анализа. Обзор существующих подходов к их решению представляет определенный интерес, в первую очередь, с позиций оценки целесообразности практической реализации и использования конкретных методов и алгоритмов в составе проблемно-ориентированных ЭС для формирования траекторий движения и управления перемещениями роботов.
Как известно, прямая задача кинематики является достаточно тривиальной и заключается в определении декартовых координат манипулятора по известным параметрам относительного положения отдельных его звеньев. Искомый результат может быть получен с помощью метода однородных матричных преобразований, задающих взаимосвязи систем координат сочленений.
Традиционный способ синтеза движений манипулятора, реализуемый в системах управления роботов, основан на интерполяции решений обратной кинематической задачи для ряда узловых точек, которые определяют характер траектории пространственного перемещения эффектора. Законы изменения обобщенных координат, полученные в результате интерполяции, обеспечивают прохождение манипулятором последовательности требуемых состояний, где соблюдаются условия отсутствия столкновений звеньев кинематической цепи с объектами внешней среды. Однако, поскольку на промежуточных участках траектории выполнение этих ограничений не гарантируется, возможность возникновения аварийной ситуации должна выявляться путем их явной проверки на этапе моделирования. При этом повторение цикла интерполяции с учетом изменений параметров является существенным недостатком, особенно для интеллектуальных роботов, у которых процессы планирования перемещений и поведения часто должны протекать в реальном масштабе времени.
Таким образом, аналитический подход к решению обратной кинематической задачи путем анализа основного кинематического соотношения позволяет разработать программно-алгоритмические Средства планирования целевых конфигураций манипулятора, однако они малоприемлемы с точки зрения дальнейшего использования получаемых результатов при синтезе движений в условиях реальных сцен, особенно с динамическими препятствиями.
Принципиально иной подход к построению движений роботов может быть основан на приближенном решении обратной кинематической задачи с помощью численных методов (непосредственное использование которых в данном случае позволяет имитировать свойство «положительного таксиса» и предполагает последовательное отыскание значений вектора обобщенных координат, минимизирующих функционал рассогласования текущего и заданного положений манипулятора). Но приближенные методы решения обратной кинематической задачи, несмотря на присущие им недостатки, весьма эффективны для разработки эффективных программно-алгоритмических средств построения движений роботов в среде с препятствиями.
При планировании целенаправленных движений манипуляторов с использованием автоматизированных процедур решения обратных задач кинематики ключевое значение имеют вопросы описания целей и ограничений синтезируемого перемещения. Выбранный способ их представления в значительной мере предопределяет мощность и эффективность планирующего алгоритма, возможности его использования к рамках инструментальной системы автономного программирования или в контуре управления движением робота.
Исходя из традиционной постановки обратной задачи кинематики, цель движения задастся в виде координат характеристической точки эффектора робота с дополнительной спецификацией параметров его ориентации и рабочего состояния. Ограничения на подвижность звеньев при этом должны либо явным образом использоваться для проверки и отбора альтернативных решений, либо включаться в аналитическое описание кинематики робота. Такой способ определения целей и ограничений не позволяет в достаточной степени унифицировать алгоритмы и структуры данных для их реализации в составе систем управления и автоматизации программирования. Это обусловлено необходимостью учета как многообразия условий функционирования роботов (например, наличия подвижных целей или препятствий, конкурирующих целей движения и т.д.), так и требований к характеру движения манипулятора.
Существенное повышение эффективности и универсальности программно-алгоритмических средств автоматизации построения движении роботов в среде с препятствиями может быть получено за счет комплексного применения геометрического подхода к решению обратной кинематической задачи и в сочетании с моделированием свойства "таксиса". Эмуляция этого свойства предусматривает синтез траектории перемещения манипулятора как функции его пространственного размещения по отношению к множеству положительных и отрицательных стимулов, которые отвечают нелепым положениям отдельных звеньев и объектам (или запрещенным областям) рабочего пространства соответственно.
Особенность этого способа решения обратной кинематической задачи состоит в использовании метода покоординатного спуска в его геометрической интерпретации, основанной на векторном представлении линеаризованных уравнений кинематической модели манипулятора. Комбинированный критерий, сформированный на основе использования простых геометрических соотношений, фактически задает способ определения искомой составляющей вектора командного перемещения манипулятора для каждого из двух возможных случаев:
1) проекция составляющей должна соответствовать вектору минимизируемого рассогласования, если при этом величина самой составляющей не будет превышать пределов диапазона, установленных оговоренными ограничениями;
2) составляющая должна иметь максимально допустимое (в смысле ограничений) значение, если вектор минимизируемого рассогласования превышает величину ее проекции.
Таким образом, основная особенность предложенного подхода к приближенному решению обратной кинематической задачи в линеаризованной постановке заключается в применении метода покоординатного спуска для минимизации функционала рассогласования малых векторов заданного и фактического перемещений манипулятора. Применение данного подхода в его геометрической интерпретации сводится к разложению заданного вектора приращения положения манипулятора на отдельные составляющие вдоль направлений виртуальных перемещений кинематической цепи, обусловленных изменением обобщенных координат отдельных звеньев. Итерационный характер регулярного алгоритма, обеспечивающего подобную декомпозицию, позволяет обеспечить требуемую точность искомого решения.
Отсутствие ограничений на организацию кинематической цепи, число и типы входящих в нее звеньев составляют одну из важнейших особенностей данного алгоритма как с точки зрения его дальнейшего использования при разработке программно-алгоритмического обеспечения систем управления интеллектуальных роботов, так и с точки зрения универсализации инструментальных средств планирования движений манипуляторов в составе автоматизированных систем подготовки прикладных робото - ориентированных управляющих программ.
Разработанный подход к решению обратной кинематической задачи в сочетании с реализацией свойства "таксиса" открывает широкие возможности для создании эффективных программно-алгоритмических средств для планирования целенаправленных движений манипуляционных роботов в среде с препятствиями.
В общем случае задача планирования целенаправленных движений манипулятора предполагает отыскание законов изменения его обобщенных координат при перемещении эффектора из известного начального положения в некоторое конечное. При этом формируемые траектории движения должны гарантировать отсутствие столкновений манипулятора с объектами внешней среды, выступающими в роли препятствий. Основные отличия частных постановок этой задачи связаны, главным образом, с полнотой описания конечного целевого состояния манипулятора:
путем указания координат точки требуемого позиционирования эффектора, которые могут дополняться значениями параметров необходимой пространственной ориентации;
путем указания конфигурации манипулятора, например, в виде параметров пространственного расположения отдельных звеньев кинематической цепи.
Применительно к манипуляционным роботам свойство "таксиса" может трактоваться как способность к организации своих движений под действием положительных и отрицательных стимулов - целей, которые соответствуют заданным положениям звеньев и пространственным ограничениям, налагаемым конфигурацией рабочей зоны и расположением препятствий.
Такая способность на уровне планирующего алгоритма может быть обеспечена использованием единого формализма для описания таких разнородных стимулов, как целевое положение характеристической точки кинематической цепи, вектор подхода, граница рабочей зоны, препятствие и т.д.
Таким образом, разработанный алгоритм обеспечивает планирование перемещений манипулятора в среде с произвольно расположенными точечными препятствиями и может использоваться с равным успехом как в случае задания только целевых позиций, так и в случаях, требующих явной спецификации траектории движения эффектора. Удобство, естественность и простота подключения геометрической модели внешнего мира робота к процессу решения, инвариантность к типу кинематической структуры манипулятора (как по числу, так и по составу звеньев) составляют основные достоинства данного алгоритма. Реализация подобного набора возможностей с помощью единой планирующей процедуры имеет не только большое самостоятельное значение, но и представляет несомненный интерес с точки зрения комплектации базы алгоритмов ЭС тактического уровня управления манипуляционными роботами.
Формирование знаний для экспертных систем планирования и управления движением манипуляторов в среде с препятствиями.
Использование алгоритмов планирования движений роботов в среде с препятствиями на основе минимизации функционала рассогласования текущего и заданного положений манипулятора в общем случае позволяет обеспечить отсутствие столкновений звеньев кинематической цепи с объектами внешнего мира в ходе синтезируемого перемещения. Однако алгоритмы этого типа не гарантируют предотвращения "тупиковых" ситуаций, когда при обходе препятствий заданное положение манипулятора остается недостижимым. С формальной точки зрения множество подобных ситуаций определяется состояниями манипулятора, которые соответствуют значениям локальных минимумов функционала рассогласования.
Традиционный подход к решению данной проблемы предполагает оптимизацию обхода препятствий при движении манипулятора к его целевому состоянию. Построение такого плана оптимального движения может быть сведено к поиску кратчайшего пути на графе и является достаточно ресурсоемкой задачей как по времени, так и по объему требуемых вычислений. Альтернативный вариант связан с перспективами применения методов искусственного интеллекта для обоснованного выбора целесообразной тактики пространственных перемещений робота в среде с препятствиями на основе знаний о его манипуляционных возможностях, допустимых способах движения и т.п.
Классификация обобщенных ситуаций, отражающих характер взаимного расположения манипулятора и объектов внешней среды с позиций достижимости заданного целевого состояния, с помощью имеющихся планирующих алгоритмов, может являться одной из основных функций ЭС тактического уровня управления интеллектуальным роботом. При этом каждому- классу таких ситуаций должна соответствовать своя логика размещения вспомогательных стимулов, формализованная в виде специальных правил и определяющая выбор некоторого образа пространственного движения манипулятора как последовательности его промежуточных положений при перемещении в заданное состояние.
Построение множества классов ситуаций и синтез адекватной тактики целесообразного перемещения манипулятора для каждого класса может осуществляться как на основе эвристических методов, так и путем обучения:
в режиме обобщения образов движения, построенных в ходе автоматического поиска результативных вариантов перемещения на этапе предварительной настройки системы и/или при ее штатном функционировании;
в режиме обобщения примеров движений, синтезируемых пользователем с помощью интерактивных обучающих процедур.
Известно, что одним из ключевых аспектов разработки любой ЭС является выбор системы базовых понятий и представлений, обеспечивающих возможность описания задач рассматриваемой предметной области на уровне качественных категорий. Применительно к задаче планирования движений манипулятора в среде с препятствиями эта проблема усугубляется разнообразием типов кинематических схем современных робототехнических устройств. Очевидно, что специфика знаний ЭС тактического уровня управления интеллектуальным роботом должна учитывать конкретные особенности кинематики, конструкции и геометрии манипуляционной механической системы. В этой связи важнейшим условием, предъявляемым к набору исходных качественных категорий, которые будут использоваться в качестве основы при формировании базы знаний такой ЭС, является требование универсальности.
Описание текущей ситуации, включая состояние сцены, манипулятора и его целевого положения, удобно рассматривать в следующем виде:
S={Sр, Sс, Sц},
где Sр - текущее состояние манипулятора; Sc - текущее состояние сцены; Sц - целевое состояние манипулятора.
Данный подход к использованию векторных представлений для качественного описания состояний манипулятора и среды его функционирования обеспечивает возможность классификации обобщенных ситуаций в задачах планирования целесообразных движении роботов.
Предложенные принципы классификации и анализа ситуаций в задачах планирования движений манипуляционных роботов применимы не только для рассмотренных условий плоской сцены с точечным препятствием, но и для более общих и сложных случаев, включая трехмерное представление рабочей среды. Переход к представлению трехмерных сцен связан с увеличением размерности задачи и не влечет существенных изменений.
Изложенные результаты разработки концепции интеллектуального управления роботами на основе технологии ЭС получили практическую реализацию в виде законченных программных продуктов.