

- •Предисловие
- •Глава 1. Вводная часть
- •§ 1. Предмет и задачи геодезии
- •§ 2. Краткие исторические сведения
- •§ 3. Единицы измерений, применяемые в геодезии
- •§ 4. Фигура и размеры Земли
- •§ 5. Содержание курса и рекомендации по его изучению
- •Глава 2. Топографические карты и планы
- •§ 6. Влияние кривизны Земли на измеренные расстояния
- •§ 7. Краткие сведения о картографических проекциях
- •§ 8. Общие сведения о топографических картах и планах
- •§ 9. Система географических координат
- •§ 10. Равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера
- •§ 11. Разграфка и номенклатура топографических карт и планов
- •§ 12. Зональная система плоских прямоугольных координат Гаусса
- •§ 13. Перевычисление координат из зоны в зону
- •§ 14. Система высот
- •§ 15. Условные знаки топографических карт и планов
- •§ 16. Изображение рельефа на топографических картах и планах
- •§ 17. Ориентирование
- •§ 18. Решение некоторых задач с использованием топографической карты
- •18.1. Измерение расстояний
- •18.2. Определение географических и прямоугольных координат
- •18.3. Ориентирование линий
- •18.4. Ориентирование карты на местности
- •18.5. Определение высот точек
- •18.6. Построение профиля
- •18.7. Построение линии заданного уклона
- •18.9. Определение площадей на топографических картах и планах
- •§ 19. Виды измерений
- •§ 20. Классификация погрешностей измерений
- •§ 21. Свойства случайных погрешностей
- •§ 22. Среднее арифметическое
- •§ 23. Средняя квадратическая погрешность
- •§ 24. Средние квадратические погрешности функций измеренных величин
- •§ 25. Обработка ряда равноточных измерений одной величины
- •§ 26. Об учете систематических погрешностей в измерениях
- •§ 27. Средняя квадратическая погрешность двойных равноточных однородных измерений
- •§ 28. Понятие о весе результата измерения
- •§ 29. Средняя квадратическая погрешность единицы веса и арифметической середины
- •§ 30. Обработка ряда неравноточных измерений одной величины
- •Глава 4. Государственные геодезические сети
- •§ 31. Назначение Государственных геодезических сетей
- •§ 32. Классы геодезических сетей
- •§ 33. Методы построения Государственных геодезических сетей
- •§ 34. Закрепление пунктов геодезических сетей
- •§ 35. Оценка точности построения опорных геодезических сетей
- •§ 36. Оценка точности построения сетей триангуляции
- •§ 37. Оценка точности построения звена полигонометрии
- •§ 38. Оценка точности построения сетей трилатерации
- •Глава 5. Геодезические приборы
- •§ 39. Классификация геодезических приборов
- •§ 40. Теодолиты
- •§ 41. Зрительные трубы
- •§ 42. Уровни и компенсаторы наклона
- •§ 43. Устройство теодолита
- •§ 44. Установка теодолита в рабочее положение
- •§ 45. Измерение горизонтальных углов и углов наклона
- •45.1. Способ приемов
- •45.2. Способ повторений
- •45.3. Способ круговых приемов
- •45.4. Измерение углов наклона
- •§ 46. Поверки теодолитов
- •§ 47. Нивелиры
- •§ 48. Устройство нивелира
- •§ 49. Нивелирные рейки
- •§ 50. Установка нивелира в рабочее положение
- •§ 51. Измерение превышений
- •§ 52. Поверки нивелиров
- •§ 53. Приборы для линейных измерений
- •§ 54. Гироскопические приборы
- •§ 55. Приборы для поиска подземных коммуникаций
- •Глава 6. Оптико-электронные геодезические приборы
- •§ 56. Общие замечания
- •§ 57. Краткие сведения о лазерных источниках излучения
- •§ 58. Электромагнитные дальномеры
- •§ 59. Светодальномеры
- •§ 60. Интерферометры
- •§ 61. Угломерные приборы
- •§ 62. Электронные тахеометры
- •§ 63. Электронные нивелиры
- •§ 64. Лазерные приборы
- •Глава 7. Построение съемочного обоснования
- •§ 65. Назначение и виды теодолитных ходов
- •§ 66. Прямая и обратная геодезические задачи на плоскости
- •§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
- •§ 68. Привязка теодолитных ходов
- •68.1. Способ примыкания
- •68.2. Прямая угловая засечка
- •68.3. Линейная засечка
- •68.4. Обратная угловая засечка
- •68.5. Комбинированные засечки
- •68.6. Задача П.А.Ганзена
- •§ 69. Особые системы теодолитных ходов
- •§ 70. Снесение координат с вершины знака на землю
- •§ 71. Определение элементов приведения и редукции
- •§ 72. Привязка теодолитных ходов к стенным геодезическим знакам
- •§ 73. Спутниковые методы определения координат
- •§ 74. Организация полевых работ при построении съемочного обоснования
- •74.1. Рекогносцировка и закрепление точек съемочного обоснования
- •74.2. Подготовка абрисов горизонтальной съемки
- •74.3. Поверки теодолита и нивелира
- •74.4. Компарирование мерных приборов
- •74.5. Измерение длин линий
- •74.6. Измерение горизонтальных углов и углов наклона
- •§ 75. Вычисления в разомкнутом теодолитном ходе
- •75.1. Предварительные вычисления
- •75.2. Обработка результатов угловых измерений
- •75.3. Вычисление приращений координат и оценка точности хода
- •75.4. Рекомендации к поиску вероятных погрешностей в измерениях и вычислениях при обработке ведомости координат
- •75.5. Уравнивание приращений координат и вычисление координат точек хода
- •75.6. Обработка ведомости высот
- •§ 76. Вычисления в замкнутом теодолитном ходе
- •76.1. Оценка точности угловых измерений и вычисление дирекционных углов
- •76.2. Вычисление приращений координат и оценка точности хода
- •76.3. Уравнивание приращений координат и вычисление координат точек хода
- •76.4. Обработка ведомости высот
- •§ 77. Обработка диагонального хода
- •Глава 8. Топографические съемки
- •§ 78. Назначение и виды топографических съемок
- •§ 79. Понятие о цифровой модели местности
- •§ 80. Теодолитная съемка
- •§ 81. Тахеометрическая съемка
- •§ 82. Составление плана местности по результатам топографической съемки
- •82.2. Нанесение на план точек съемочного обоснования
- •82.3. Нанесение на план результатов тахеометрической съемки
- •82.4. Рисовка рельефа и ситуации
- •82.5. Построение на плане ситуации по результатам теодолитной съемки
- •Глава 9. Нивелирные работы
- •§ 83. Способы и методы нивелирования
- •§ 84. Способы геометрического нивелирования
- •§ 85. Основные источники погрешностей геометрического нивелирования
- •§ 86. Техническое нивелирование
- •§ 87. Трассирование
- •§ 88. Расчет и разбивка главных точек кривых на трассе
- •§ 89. Нивелирование поперечных профилей
- •§ 90. Обработка результатов нивелирования трассы
- •§ 91. Построение профиля трассы
- •§ 92. Построение проектной линии
- •§ 93. Построение поперечного профиля и проектного полотна дороги
- •§ 94. Нивелирование площадей
- •Глава 10. Геодезические разбивочные работы
- •§ 95. Назначение и организация разбивочных работ
- •§ 96. Построение на местности проектного горизонтального угла
- •§ 97. Построение на местности проектного расстояния
- •§ 99. Способы разбивочных работ
- •§ 100. Расчет разбивочных элементов
- •§ 101. Разбивочные работы при трассировании
- •§ 102. Разбивка фундаментов инженерных сооружений
- •§ 103. Оценка точности разбивочных работ
- •Глава 11. Геодезические работы в строительстве
- •§ 104. Общие положения
- •§ 105. Краткие сведения об объектах строительства
- •§ 106. Геодезические работы при строительстве промышленных сооружений
- •§ 107. Геодезические работы при строительстве гражданских зданий
- •§ 108. Геодезические работы при строительстве дорог и мостовых сооружений
- •§ 109. Геодезические работы при планировании и застройке населенных пунктов
- •§ 110. Геодезические работы при строительстве подземных коммуникаций
- •§ 111. Геодезические работы при строительстве гидротехнических сооружений
- •Глава 12. Геодезические работы в подземном строительстве
- •§ 115. Горизонтальная соединительная съемка
- •115.2. Горизонтальная соединительная съемка через один шахтный ствол
- •§ 116. Вертикальная соединительная съемка
- •§ 117. Подземная горизонтальная съемка
- •§ 118. Подземная вертикальная съемка
- •§ 119. Геодезические разбивочные работы в подземном строительстве
- •§ 120. Задачи и содержание топографо-геодезических работ
- •§ 121. Точность геодезических работ
- •§ 122. Создание топографических карт и планов
- •§ 123. Разбивка геодезических сеток и профильных линий
- •§ 124. Разбивочные работы при проведении геологической разведки
- •§ 126. Виды деформаций инженерных сооружений
- •§ 127. Задачи наблюдений и организация работ
- •§ 128. Геодезические знаки и их конструкции
- •§ 129. Размещение геодезических знаков на инженерных сооружениях
- •§ 130. Точность измерения деформаций
- •§ 131. Периодичность наблюдений
- •§ 132. Наблюдения за вертикальными перемещениями
- •§ 133. Наблюдения за горизонтальными смещениями
- •§ 134. Наблюдения за кренами
- •§ 135. Наблюдения за деформациями земной поверхности
- •§ 136. Разработка методики наблюдений
- •§ 137. Обработка и анализ результатов наблюдений
- •Глава 15. Особенности точных и высокоточных измерений
- •§ 138. Основные группы погрешностей измерений
- •§ 139. Учет влияния рефракции атмосферы
- •§ 140. Высокоточное и точное геометрическое нивелирование
- •§ 141. Нивелирование I класса
- •§ 142. Нивелирование II класса
- •§ 143. Нивелирование III и IV классов
- •§ 144. Особенности точного и высокоточного нивелирования при наблюдениях за деформациями
- •§ 145. Высокоточные и точные угловые измерения
- •§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
- •Глава 16. Уравнивание геодезических построений
- •§ 147. Основные задачи уравнительных вычислений
- •§ 148. Метод наименьших квадратов
- •§ 149. Классификация основных способов уравнивания
- •§ 150. Основные геометрические условия, возникающие в построениях
- •150.1. Условие фигуры
- •150.2. Условие горизонта
- •150.3. Условие суммы углов
- •150.4. Условие дирекционных углов
- •150.5. Условие сторон
- •150.6. Условие полюса
- •150.7. Условие координат
- •§ 151. Методы решения систем линейных нормальных уравнений
- •151.1. Способ последовательной подстановки
- •151.2. Способ матричных преобразований
- •151.3. Решение систем линейных уравнений по алгоритму Гаусса
- •151.4. Способ краковянов
- •§ 152. Коррелатный способ уравнивания
- •§ 153. Примеры коррелатного способа уравнивания
- •153.1. Уравнивание углов в полигоне
- •153.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •153.3. Уравнивание полигонометрического хода
- •153.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •153.5. Уравнивание триангуляции
- •153.6. Уравнивание триангуляции по условию координат
- •§ 154. Параметрический способ уравнивания
- •§ 155. Примеры параметрического способа уравнивания
- •155.1. Уравнивание углов в полигоне
- •155.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •155.3. Уравнивание полигонометрического хода
- •155.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •155.5. Уравнивание направлений в триангуляции
- •§ 156. Способ раздельного уравнивания
- •156.1. Уравнивание полигонометрического хода
- •156.2. Система полигонометрических ходов с одной узловой точкой
- •156.3. Система нивелирных ходов с одной узловой точкой
- •§ 157. Способ эквивалентной замены
- •§ 158. Способ полигонов В.В.Попова
- •§ 159. Способ последовательных приближений
- •§ 160. Оценка точности уравненных элементов и их функций
- •160.1. Общие положения
- •160.2. Оценка точности при уравнивании коррелатным способом
- •160.3. Оценка точности при уравнивании параметрическим способом
- •Предметный указатель
- •Список литературы
- •Оглавление
основных подходов к выбору способов уравнивания: а) строгое уравнивание выполнять для точных измерений, а нестрогое – для измерений более низкой точности; б) не уравнивать измерения, полученные с точностью, значительно превышающей заданную; в) нестрогие способы применять только в том случае, если они равноценны строгим; г) уравнивать строгими способами все без исключения измерения; д) строгое уравнивание выполнять только для измерений первого (начального) цикла, а в последующих циклах применять только нестрогое уравнивание.
Выбор того или иного способа уравнивания в каждом случае должен определяться как требованиями к точности измерений, так и значениями фактически полученных невязок при проведении циклов и их допустимыми величинами. Если полученные невязки окажутся значимо меньше допустимых, то уравнивание можно проводить и нестрогими способами, либо, в каких-то случаях не уравнивать вообще. Приближенный способ уравнивания может быть использован и в тех случаях, когда поправки в измеренные значения не будут превосходить установленного основного допуска, определяемого часто, как «критерий ничтожной погрешности». Основной допуск может быть определен как 1/3 – 1/5 от заданной точности измерений.
§ 145. Высокоточные и точные угловые измерения
Как и при геометрическом нивелировании, при использовании для измерения деформаций и при измерениях в микролокальных сетях, при выполнении измерений в геодезических сетях высоких классов и др. погрешности делят на пять групп. Рассмотрим некоторые особенности групп погрешностей применительно к измерению горизонтальных углов и зенитных расстояний.
Систематические погрешности визирования чаще всего обусловлены особенностями восприятия глазом изображений целей, имеющих различную яркость. Эти погрешности могут достигать величин 1,5" и более. При астрономических наблюдениях, например, момент регистрации прохождения звезды через меридиан раньше наступает для более ярких звезд, поэтому при измерениях углов между направлениями на две звезды необходимо выбирать звезды одинаковой яркости, либо для ярких звезд подбирать выравнивающий нейтральный светофильтр.
Систематические погрешности диаметров лимба теодолита могут быть длинно- и короткопериодическими и достигать величин 0,7". Для ослабления этих погрешностей горизонтальный круг следует переставлять на величину
k = |
180 |
0 |
+ n , |
(15.3) |
|
|
m |
|
|||
|
|
|
|
|
|
где m – число приемов; n – цена наименьшего деления лимба. Чем больше m, тем меньше будет погрешность измерения угла. Например, при исследованиях теодолитов число приемов делают в пределах 12 - 36.
Для высокоточных приборов их коллимационная погрешность c, являющаяся систематической погрешностью, не должна превышать 10".
379
Величину ее определяют по формуле (5.7), но с учетом зенитного расстояния z визирной цели:
c = 0,5(КЛ − КП ± 180 0 )sin z |
(15.4) |
В равнинной местности значения зенитных расстояний близки к 90о, поэтому ими пренебрегают. При разных зенитных расстояниях возможны случаи, когда для одного из направлений зенитное расстояние учитывают, а для другого – пренебрегают.
Погрешность угла из-за изменения коллимационной погрешности зрительной трубы может быть ослаблена при симметричных схемах построений, когда не требуется изменять фокусировку изображения.
Для исключения систематической погрешности, обусловленной влияянием наклона горизонтальной оси вращения зрительной трубы, измерение углов выполняют при круге право (КП) и при круге лево (КЛ). Среднее значение измеренного угла будет полностью свободно от указанной систематической погрешности.
Систематическая погрешность из-за влияния наклона вертикальной оси теодолита полностью в полном приеме измерений не исключается. В связи с этим при высокоточных измерениях вертикальную ось следует тщательно приводить в отвесное положение. Но и при тщательной ее установке требуется определить угол ее наклона q с помощью точного накладного уровня, либо установочного уровня при алидаде горизонтального круга. Для этого в каждом полуприеме по уровню берут отсчеты по правому и левому концам пузырька уровня и вычисляют значение b:
b = 0,5[(Л + П)КЛ − (Л + П)КП ] , |
(15.5) |
где (Л+П)КЛ и (Л+П)КП – соответственно суммы отсчетов по левому и правому концам пузырька уровня, когда ноль уровня находится слева и справа от измеряемого направления.
В этом случае
q = 0,5bτ , |
(15.6) |
где τ – цена деления уровня.
При углах наклона визирной оси зрительной трубы более 1о в измеренное направление вводят поправку
t = q ×ctgz |
(15.7) |
Для ослабления влияния люфта подъемных винтов подставки половину всех приемов следует выполнять при вращении алидады по ходу часовой стрелки, а вторую половину – против хода часовой стрелки. Часто бывает, что при вращении алидады, например, по часовой стрелке, пришлось сделать возвратное, пусть и небольшое, движение. В этом случае необходимо по часовой стрелке слелать дополнительный оборот.
Влияние температурных деформаций теодолита на погрешность измерения углов может быть значительным и достигать 1" и более. В связи с этим не следует выполнять высокоточные измерения при резких скачках температуры воздуха на несколько градусов. До начала измерений теодолит следует выдержать в тени не менее 1 часа, защищать его от действия прямых солнечных лучей, сокращать время выполнения полного приема измерений.
380

Высокоточные измерения углов и зенитных расстояний выполняют при измерениях в геодезических сетях в выгоднейшее время измерений, в моменты изотермии воздуха.
Погрешность mβ угла из-за центрирования теодолита определяется по формуле
|
|
lρ |
|
|
|
|
|
mβ = |
|
|
S12 + S22 − 2S1S2 cos β , |
(15.8) |
|||
|
|
|
|||||
2S1S2 |
|||||||
где S1 и S2 – стороны угла β; l –линейный элемент центрирования; ρ= 206265". При коротких расстояниях, что имеет место при измерениях деформаций, создании микролокальных построений, погрешность угла может достигать больших величин. Так, например, при расстояниях 50 м, угле 60о и линейном элементе центрирования l = 0,5 мм погрешность измерения угла составит порядка 1,5". Для уменьшения этой погрешности, если это окажется необходимым, следует уменьшить линейный элемент центрирования, т.е.
применить в данном случае принудительное центрирование.
Вторая группа инструментальных погрешностей связана с несовершенством конструкции визирных целей и их установкой в наблюдаемых точках.
Погрешность угла из-за погрешности центрирования визирной цели может быть оценена по формуле
m |
β |
= lρ |
|
S12 + S22 |
|
(15.9) |
|
S12 S22 |
|||||||
|
|
|
|
|
Так, принимая значения расстояний 50 м, линейный элемент центрирования 0,5 мм получим погрешность измерения угла, равную 2", т.е.больше, чем при таких же условиях из-за такой же величины линейного элемента центрирования.
По той же формуле (15.9) определяется и погрешность из-за несовпадения оси визирного штриха цели с осью вращения этой цели.
Большое влияние оказывают на погрешности измерений и несовершенство размеров и формы визирных целей, их высота над точкой центрирования.
Влияние внешней среды вызывает погрешности направлений из-за колебаний изображения от турбулентных потоков воздуха, из-за деформаций деталей и узлов прибора от температурных воздействий, кручения штатива и визирных целей при длительных стояниях на станциях, смещения штатива в горизонтальном направлении при вибрационных воздействиях и действии массы наблюдателя, из-за неравномерной освещенности наблюдаемой точки на цели и мн.др.
§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
Микролокальные схемы измерений используются часто в случаях, когда требования к точности измерения деформаций отдельных частей объекта значительно различаются. К микролокальным схемам можно отнести и двух-
381
ступенчатые (и более) схемы измерений, в которых проектируется основная (исходная) ступень, обычно по исходным геодезически знакам, и вторая (третья) ступени, опирающиеся на пункты первой ступени. В первом случае могут быть образованы микролокальные схемы, не связанные между собой и опирающиеся на один или несколько исходных пунктов. Во втором случае все микролокальные схемы между собой связаны перемычками и образуют единую систему с точностью измерений в каждой взаимосвязанного ступенчатого характера, например, с коэффициентом λ: m (1-я ступень) → λm (2-я ступень) → 2 λm (3-я ступень) и т.д.
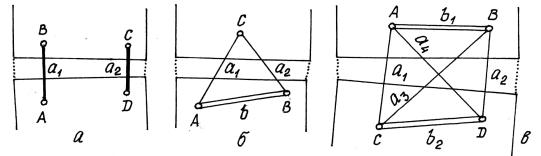
Рис. 15.6. Схемы измерения раскрытия трещин а) – двухточечная; б) – трехточечная; в) – четырехточечная
Микролокальные схемы чаще всего служат: а) для наблюдений за трещинами, щелями, температурными и осадочными швами с использованием двух-, трех- и четырехточечных щелемерных приспособлений (рис. 15.6); б) для наблюдений за горизонтальными смещенями гидротехнических сооружений и оползневых участков с использованием, в основном, створных методов и методов геодезических засечек; в) для наблюдений за вертикальными перемещениями отдельных сооружений, либо их частей или узлов, находящихся на одной или значительно разных высотах и др.
Особенности измерений и оценки точности нивелирных схем довольно подробно рассмотрены выше в гл. 14. Здесь будут показаны некоторые особенности проектирования микролокальных схем микротриангуляции, микротрилатерации, линейно-угловых построений, короткобазисной полигонометрии и схем створных измерений, предназначенных для измерения планового положения точек.
Схемы микротриангуляции и другие схемы разрабатывают на топографических картах и планах, чаще выполненных в масштабе 1:500 и крупнее. На карте (плане) намечают места закладки исходных геодезических знаков А и В (рис. 15.7), размещаемых вне зоды возможных деформаций, систему промежуточных точек 1, 2, 3, 4, 5 для обеспечения необходимой формы геодезических построений с включением в нее системы опорных знаков 100, 200, 300, С, D, размещаемых на наблюдаемых объектах. Для полученных схем вычисляют проектные значения углов и расстояний, выбирают единицу веса и вычисляют веса уравниваемых (измеряемых) элементов, определяют качественные характеристики для секций системы. После этого оценивают качественные характеристики наиболее слабых точек системы, включенных
382

в наблюдаемые, с целью выбора технических средств (теодолита, мерных приборов) и разрабоки необходимой методики измерений.
Рис. 15.7. Схема микротрангуляции (микротрилатерации, линейно-угловых построений) для наблюдений за горизонтальными смещениями
При определении качественных характеристик микротриангуляции в первом приближении принимают измерение углов одним полным приемом, а базисов – с относительной погрешностью измерений, примерно соответствующей точности измерения углов. Из практики известно, что в схемах микротриангуляции чаще всего углы и расстояния приходится измерять 3 - 6 приемами, т.е. практически можно вводить в оценку единицы веса, например, 2 полных приема измерения угла.
В системах микротрилатерации и линейно-угловых построениях, которые могут быть использованы в той же схеме рис. 15.7, выполняются аналогичные работы. В схемах микротрилатерации исходной для расчетов и оценок величиной является точность измерения расстояний, определяемых одним или двумя полными приемами (полный прием предусматривает измерение дважды - в прямом и обратном направлениях). В схеме линейноугловых построений, а также в схемах короткобазисной полигонометрии, исходными величинами являются как точность измерения горизонтальных углов, так и точность измерения рабочих расстояний и базисов.
Если в запроектированной схеме затруднено выполнение поставленных нормативов по точности, то ее необходимо усилить дополнительными связями. Например, образовать в схеме микротриангуляции (рис. 15.7) геодезические четырехугольники (дополнительные связи показаны пунктирными линиями). Целесообразно дополнительные построения привязывать к определяемым точкам.
В гл. 14 рассмотрены схемы створных измерений деформаций. Рассмотрим более подробно принцип использования и качество той или иной схемы.
При малых длинах створов применяют схему полного (или общего) створа (рис. 14.3 а). Из-за разностей расстояний до наблюдаемых точек результаты измерений получаются неравноточными. Веса результатов измере-
383

ния нестворностей оцениваются по формуле, связанной с расстояниями Si до наблюдаемых точек с учетом установленной (принятой) единицы веса Se:
Pi = |
Se2 |
(15.10) |
2 |
||
|
Si |
|
Увеличение веса здесь может быть достигнуто увеличением приемов n измерений для слабых точек системы. В этом случае
Pi = |
S 2 |
|
|
e |
n |
(15.11) |
|
2 |
|||
|
Si |
|
|
Схема частей створа (рис. 15.8) применяется при больших длинах створа. В этом случае створ делят на две, три или четыре части, примерно равные по длине.
Рис. 15.8. Схема частей створа
Если створ поделен, например, на четыре части, то сначала определяют нестворность средней точки 4 относительно створа А-В, затем определяют нестворности точек 2 и 6 относительно полустворов А-4 и 4-В, применяя к ним схему полного створа. Далее, в пределах каждого четвертьствора по схеме полного створа определяют нестворности точек 1, (А-2), 3 (2-4), 5 (4-6) и 7 (6-В).
Исследование схемы полного створа и схемы частей створа показывает, что качественные их характеристики практически одинаковые, но заметно различаются для разностей нестворностей, т.е. – для деформаций. В схеме частей створа веса разностей нестворностей получаются большими, чем в схеме полного створа.
Схему последовательных створов (рис. 14.3 в) применяют чаще в тех случаях, когда требуется получить высокую точность конечных результатов измерений. Качественные характеристики для разностей нестворностей в этой схеме существенно меньше таких же характеристик для схемы полного створа и схемы частей створа. Напомним здесь, что качественные характеристики определяются обратными весами, поэтому чем меньше качественная характеристика по своему значению, тем больше вес данного элемента или системы.
384