

- •Предисловие
- •Глава 1. Вводная часть
- •§ 1. Предмет и задачи геодезии
- •§ 2. Краткие исторические сведения
- •§ 3. Единицы измерений, применяемые в геодезии
- •§ 4. Фигура и размеры Земли
- •§ 5. Содержание курса и рекомендации по его изучению
- •Глава 2. Топографические карты и планы
- •§ 6. Влияние кривизны Земли на измеренные расстояния
- •§ 7. Краткие сведения о картографических проекциях
- •§ 8. Общие сведения о топографических картах и планах
- •§ 9. Система географических координат
- •§ 10. Равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера
- •§ 11. Разграфка и номенклатура топографических карт и планов
- •§ 12. Зональная система плоских прямоугольных координат Гаусса
- •§ 13. Перевычисление координат из зоны в зону
- •§ 14. Система высот
- •§ 15. Условные знаки топографических карт и планов
- •§ 16. Изображение рельефа на топографических картах и планах
- •§ 17. Ориентирование
- •§ 18. Решение некоторых задач с использованием топографической карты
- •18.1. Измерение расстояний
- •18.2. Определение географических и прямоугольных координат
- •18.3. Ориентирование линий
- •18.4. Ориентирование карты на местности
- •18.5. Определение высот точек
- •18.6. Построение профиля
- •18.7. Построение линии заданного уклона
- •18.9. Определение площадей на топографических картах и планах
- •§ 19. Виды измерений
- •§ 20. Классификация погрешностей измерений
- •§ 21. Свойства случайных погрешностей
- •§ 22. Среднее арифметическое
- •§ 23. Средняя квадратическая погрешность
- •§ 24. Средние квадратические погрешности функций измеренных величин
- •§ 25. Обработка ряда равноточных измерений одной величины
- •§ 26. Об учете систематических погрешностей в измерениях
- •§ 27. Средняя квадратическая погрешность двойных равноточных однородных измерений
- •§ 28. Понятие о весе результата измерения
- •§ 29. Средняя квадратическая погрешность единицы веса и арифметической середины
- •§ 30. Обработка ряда неравноточных измерений одной величины
- •Глава 4. Государственные геодезические сети
- •§ 31. Назначение Государственных геодезических сетей
- •§ 32. Классы геодезических сетей
- •§ 33. Методы построения Государственных геодезических сетей
- •§ 34. Закрепление пунктов геодезических сетей
- •§ 35. Оценка точности построения опорных геодезических сетей
- •§ 36. Оценка точности построения сетей триангуляции
- •§ 37. Оценка точности построения звена полигонометрии
- •§ 38. Оценка точности построения сетей трилатерации
- •Глава 5. Геодезические приборы
- •§ 39. Классификация геодезических приборов
- •§ 40. Теодолиты
- •§ 41. Зрительные трубы
- •§ 42. Уровни и компенсаторы наклона
- •§ 43. Устройство теодолита
- •§ 44. Установка теодолита в рабочее положение
- •§ 45. Измерение горизонтальных углов и углов наклона
- •45.1. Способ приемов
- •45.2. Способ повторений
- •45.3. Способ круговых приемов
- •45.4. Измерение углов наклона
- •§ 46. Поверки теодолитов
- •§ 47. Нивелиры
- •§ 48. Устройство нивелира
- •§ 49. Нивелирные рейки
- •§ 50. Установка нивелира в рабочее положение
- •§ 51. Измерение превышений
- •§ 52. Поверки нивелиров
- •§ 53. Приборы для линейных измерений
- •§ 54. Гироскопические приборы
- •§ 55. Приборы для поиска подземных коммуникаций
- •Глава 6. Оптико-электронные геодезические приборы
- •§ 56. Общие замечания
- •§ 57. Краткие сведения о лазерных источниках излучения
- •§ 58. Электромагнитные дальномеры
- •§ 59. Светодальномеры
- •§ 60. Интерферометры
- •§ 61. Угломерные приборы
- •§ 62. Электронные тахеометры
- •§ 63. Электронные нивелиры
- •§ 64. Лазерные приборы
- •Глава 7. Построение съемочного обоснования
- •§ 65. Назначение и виды теодолитных ходов
- •§ 66. Прямая и обратная геодезические задачи на плоскости
- •§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
- •§ 68. Привязка теодолитных ходов
- •68.1. Способ примыкания
- •68.2. Прямая угловая засечка
- •68.3. Линейная засечка
- •68.4. Обратная угловая засечка
- •68.5. Комбинированные засечки
- •68.6. Задача П.А.Ганзена
- •§ 69. Особые системы теодолитных ходов
- •§ 70. Снесение координат с вершины знака на землю
- •§ 71. Определение элементов приведения и редукции
- •§ 72. Привязка теодолитных ходов к стенным геодезическим знакам
- •§ 73. Спутниковые методы определения координат
- •§ 74. Организация полевых работ при построении съемочного обоснования
- •74.1. Рекогносцировка и закрепление точек съемочного обоснования
- •74.2. Подготовка абрисов горизонтальной съемки
- •74.3. Поверки теодолита и нивелира
- •74.4. Компарирование мерных приборов
- •74.5. Измерение длин линий
- •74.6. Измерение горизонтальных углов и углов наклона
- •§ 75. Вычисления в разомкнутом теодолитном ходе
- •75.1. Предварительные вычисления
- •75.2. Обработка результатов угловых измерений
- •75.3. Вычисление приращений координат и оценка точности хода
- •75.4. Рекомендации к поиску вероятных погрешностей в измерениях и вычислениях при обработке ведомости координат
- •75.5. Уравнивание приращений координат и вычисление координат точек хода
- •75.6. Обработка ведомости высот
- •§ 76. Вычисления в замкнутом теодолитном ходе
- •76.1. Оценка точности угловых измерений и вычисление дирекционных углов
- •76.2. Вычисление приращений координат и оценка точности хода
- •76.3. Уравнивание приращений координат и вычисление координат точек хода
- •76.4. Обработка ведомости высот
- •§ 77. Обработка диагонального хода
- •Глава 8. Топографические съемки
- •§ 78. Назначение и виды топографических съемок
- •§ 79. Понятие о цифровой модели местности
- •§ 80. Теодолитная съемка
- •§ 81. Тахеометрическая съемка
- •§ 82. Составление плана местности по результатам топографической съемки
- •82.2. Нанесение на план точек съемочного обоснования
- •82.3. Нанесение на план результатов тахеометрической съемки
- •82.4. Рисовка рельефа и ситуации
- •82.5. Построение на плане ситуации по результатам теодолитной съемки
- •Глава 9. Нивелирные работы
- •§ 83. Способы и методы нивелирования
- •§ 84. Способы геометрического нивелирования
- •§ 85. Основные источники погрешностей геометрического нивелирования
- •§ 86. Техническое нивелирование
- •§ 87. Трассирование
- •§ 88. Расчет и разбивка главных точек кривых на трассе
- •§ 89. Нивелирование поперечных профилей
- •§ 90. Обработка результатов нивелирования трассы
- •§ 91. Построение профиля трассы
- •§ 92. Построение проектной линии
- •§ 93. Построение поперечного профиля и проектного полотна дороги
- •§ 94. Нивелирование площадей
- •Глава 10. Геодезические разбивочные работы
- •§ 95. Назначение и организация разбивочных работ
- •§ 96. Построение на местности проектного горизонтального угла
- •§ 97. Построение на местности проектного расстояния
- •§ 99. Способы разбивочных работ
- •§ 100. Расчет разбивочных элементов
- •§ 101. Разбивочные работы при трассировании
- •§ 102. Разбивка фундаментов инженерных сооружений
- •§ 103. Оценка точности разбивочных работ
- •Глава 11. Геодезические работы в строительстве
- •§ 104. Общие положения
- •§ 105. Краткие сведения об объектах строительства
- •§ 106. Геодезические работы при строительстве промышленных сооружений
- •§ 107. Геодезические работы при строительстве гражданских зданий
- •§ 108. Геодезические работы при строительстве дорог и мостовых сооружений
- •§ 109. Геодезические работы при планировании и застройке населенных пунктов
- •§ 110. Геодезические работы при строительстве подземных коммуникаций
- •§ 111. Геодезические работы при строительстве гидротехнических сооружений
- •Глава 12. Геодезические работы в подземном строительстве
- •§ 115. Горизонтальная соединительная съемка
- •115.2. Горизонтальная соединительная съемка через один шахтный ствол
- •§ 116. Вертикальная соединительная съемка
- •§ 117. Подземная горизонтальная съемка
- •§ 118. Подземная вертикальная съемка
- •§ 119. Геодезические разбивочные работы в подземном строительстве
- •§ 120. Задачи и содержание топографо-геодезических работ
- •§ 121. Точность геодезических работ
- •§ 122. Создание топографических карт и планов
- •§ 123. Разбивка геодезических сеток и профильных линий
- •§ 124. Разбивочные работы при проведении геологической разведки
- •§ 126. Виды деформаций инженерных сооружений
- •§ 127. Задачи наблюдений и организация работ
- •§ 128. Геодезические знаки и их конструкции
- •§ 129. Размещение геодезических знаков на инженерных сооружениях
- •§ 130. Точность измерения деформаций
- •§ 131. Периодичность наблюдений
- •§ 132. Наблюдения за вертикальными перемещениями
- •§ 133. Наблюдения за горизонтальными смещениями
- •§ 134. Наблюдения за кренами
- •§ 135. Наблюдения за деформациями земной поверхности
- •§ 136. Разработка методики наблюдений
- •§ 137. Обработка и анализ результатов наблюдений
- •Глава 15. Особенности точных и высокоточных измерений
- •§ 138. Основные группы погрешностей измерений
- •§ 139. Учет влияния рефракции атмосферы
- •§ 140. Высокоточное и точное геометрическое нивелирование
- •§ 141. Нивелирование I класса
- •§ 142. Нивелирование II класса
- •§ 143. Нивелирование III и IV классов
- •§ 144. Особенности точного и высокоточного нивелирования при наблюдениях за деформациями
- •§ 145. Высокоточные и точные угловые измерения
- •§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
- •Глава 16. Уравнивание геодезических построений
- •§ 147. Основные задачи уравнительных вычислений
- •§ 148. Метод наименьших квадратов
- •§ 149. Классификация основных способов уравнивания
- •§ 150. Основные геометрические условия, возникающие в построениях
- •150.1. Условие фигуры
- •150.2. Условие горизонта
- •150.3. Условие суммы углов
- •150.4. Условие дирекционных углов
- •150.5. Условие сторон
- •150.6. Условие полюса
- •150.7. Условие координат
- •§ 151. Методы решения систем линейных нормальных уравнений
- •151.1. Способ последовательной подстановки
- •151.2. Способ матричных преобразований
- •151.3. Решение систем линейных уравнений по алгоритму Гаусса
- •151.4. Способ краковянов
- •§ 152. Коррелатный способ уравнивания
- •§ 153. Примеры коррелатного способа уравнивания
- •153.1. Уравнивание углов в полигоне
- •153.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •153.3. Уравнивание полигонометрического хода
- •153.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •153.5. Уравнивание триангуляции
- •153.6. Уравнивание триангуляции по условию координат
- •§ 154. Параметрический способ уравнивания
- •§ 155. Примеры параметрического способа уравнивания
- •155.1. Уравнивание углов в полигоне
- •155.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •155.3. Уравнивание полигонометрического хода
- •155.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •155.5. Уравнивание направлений в триангуляции
- •§ 156. Способ раздельного уравнивания
- •156.1. Уравнивание полигонометрического хода
- •156.2. Система полигонометрических ходов с одной узловой точкой
- •156.3. Система нивелирных ходов с одной узловой точкой
- •§ 157. Способ эквивалентной замены
- •§ 158. Способ полигонов В.В.Попова
- •§ 159. Способ последовательных приближений
- •§ 160. Оценка точности уравненных элементов и их функций
- •160.1. Общие положения
- •160.2. Оценка точности при уравнивании коррелатным способом
- •160.3. Оценка точности при уравнивании параметрическим способом
- •Предметный указатель
- •Список литературы
- •Оглавление
величины смещений, полное смещение и его направление, а также определить величину крена сооружения.
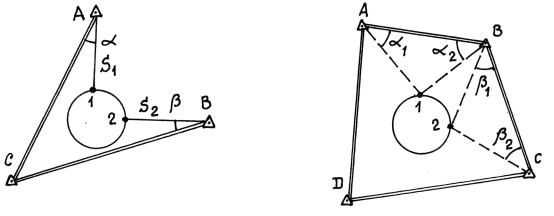
Рис. 14.6. Способ горизонатальных углов
Рис. 14.7. Способ координат
Аналогичную схему сравнительно легко применить и в способе координат (рис. 14.7). Вокруг сооружения прокладывают замкнутый полигонометрический ход А-В-С-D и с его пунктов угловой засечкой получают координаты исследуемых точек 1 и 2. Разности значений координат в сопоставляемых циклах наблюдений укажут направление крена и его величину.
На небольших базах крен измеряют с помощью клинометров с цилиндрическим уровнем, имеющем точность не более 5", либо с помощью микронивелиров.
§ 135. Наблюдения за деформациями земной поверхности
Здесь имеются в виду наблюдения за оползнями и деформациями в
мульдах сдвижения.
Оползневые явления и деформации земной поверхности в мульдах сдвижения происходят как в вертикальном, так и в горизонтальном направлениях. В связи с этим наблюдательные станции чаще должны обеспечивать возможность определения плановых координат точек и их высот, т.е. обеспечивать пространственные (трехмерные) измерения .
В некоторых случаях задача определения трех координат не ставится, а проектируются только, например, осевые (одномерные), плановые (двумерные) и высотные смещения.
Для определения смещений точек земной поверхности используют различные методы, краткие пояснения по которым приведены ниже.
Осевые методы используют в тех случаях, когда направление движения грунтов известно. Они могут быть реализованы тремя способами: расстояний (рис. 14.8 а ), створов (рис. 14.8 б ), горизонтальных углов (рис. 14.8 в).
В первом способе измеряют расстояния S между точками на линии створа последовательно, начиная от неподвижной точки А и заканчивая на неподвижной точке В створа.
356
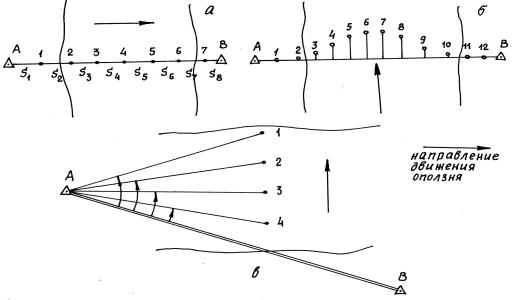
Рис. 14.8. Осевые методы наблюдений за оползнями а) способ расстояний; б) способ створов; в) способ горизонтальных углов
В способе створов линию створа располагают перпендикулярно к направлению движения грунтов. Измерения здесь выполняют различными известными методами, рассмотренными выше.
Способ горизонтальных углов используется в тех случаях, когда существует опасность нахождения человека непосредственно в зоне сдвижения грунтов и горных пород. Горизонтальные углы на исследуемые рабочие реперы измеряют относительно исходного направления. При известных линейных расстояниях от станции до точки определяют перемещения последних вдоль оси оползня.
Пространственные смещения определяют чаще в мульдах сдвижения с использованием плановых и высотных способов. Для измерения вертикальных перемещений применяют способы геометрического и тригонометрического нивелирования, для определения плановых смещений – методы
триангуляции, трилатерации, полигонометрии, засечек и т.п., рассмотренные выше в этом и других разделах учебника. Для определения пространственного смещения точек земной поверхности используют стереофотограмметрический способ.
§ 136. Разработка методики наблюдений
Под методикой инженерно-геодезических измерений понимается полная и последовательная совокупность действий, соблюдение которых при измерениях и обработке данных позволяет обеспечить необходимую (заданную) точность измерений.
В связи с этим в понятие «методика» входят требования ко всем элементам, участвующим в измерениях: к опытности наблюдателя; типу используемых приборов; к конструкциям геодезических знаков (исходных и рабо-
357
чих); к условиям производства работ; к способам обработки результатов измерений и мн.др.
Все указанные требования определяются, в первую очередь, качественной характеристикой схемы измерений. Качественным показателем для каждого элемента схемы измерений является единица веса, либо вес р данного элемента (обратный вес q=1/ р данного элемента). Элементом схемы измерений может явиться отдельная ее точка, секция (ход между двумя точками), полигон и т.п.
Указанные в техническом задании требования к точности измерений относятся ко всем точкам системы, независимо от их расположения на объекте, а также независимо от используемой схемы измерений. В связи с этим, для выбора класса измерений необходимо определить качественную характеристику для слабой точки Е схемы измерений. При этом очевидно, что для остальных точек схемы обеспечение необходимой точности измерений будет реализовано.
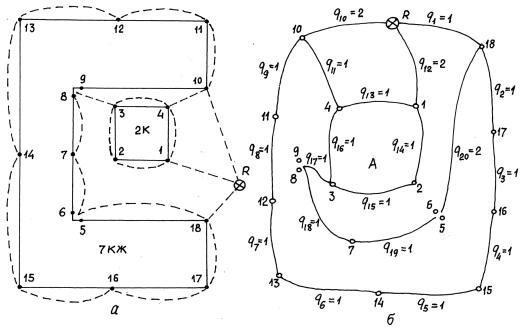
Рассмотрим пример определения качественных характеристик схемы измерений на основе измерения вертикальных перемещений двух зданий (рис. 14.9 а).
Рис. 14.9. Схема измерения вертикальных перемещений а) размещение рабочих реперов на сооружениях; б) схема нивелирных ходов
На здании 7КЖ запроектировано наблюдение 14 точек, причем, точки 5, 6 и 8, 9 – двойные, находятся в местах стыка конструкций здания. На здании 2К размещено 4 точки. Привязка выполнена к исходному реперу R. На рис. 14.9 б показана запроектированная схема нивелирных ходов, проложенных с учетом условий измерений. На схеме нивелирных ходов указаны качественные характеристики превышений в секциях (обратные веса превышений), определяемые числом штативов (станций), необходимых для измерения данного превышения. Так, q= 1 – одна станция, q = 2 – две станции. Т.е. еди-
358
ницей веса здесь, например, является превышение, измеренное в ходе одного направления при одном горизонте прибора по двум шкалам нивелирной рейки на одной станции.
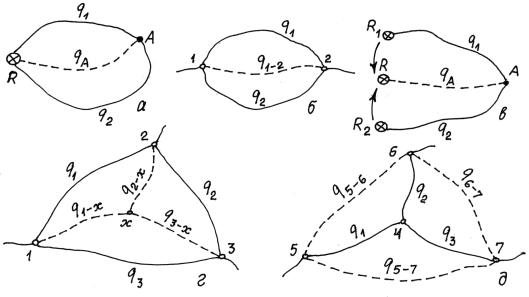
Для определения наиболее слабой точки в приведенной схеме измерений (точки, имеющей наибольшее значение q), необходимо выполнить преобразования (эквивалентную замену) до установления непосредственной связи исходного репера со слабоопределяемой точкой. Схемы возможных преобразований представлены на рис. 14.10.
Рис. 14.10. Преобразования схем способом эквивалентной замены а) в полигоне; б) между узловыми точками; в) для точки, находящейся в секции
между исходными пунктами; г) преобразование «треугольник-звезда»; д) преобразование «звезда-треугольник»
Для любой точки А полигона (рис. 14.10 а), включающего исходный репер, либо опирающегося на узловую точку, значение качественной характеристики qА определяется по формуле
qA = |
q ×q |
|
|||
1 |
|
2 |
. |
(14.6) |
|
q |
+ |
q |
|||
|
1 |
|
2 |
|
|
В частности, если q1=q2=q, т.е. точка А находится по весовым характеристикам посредине полигона (является наиболее слабой точкой Е), то
qA( E ) = |
q |
= |
П |
, |
(14.7) |
|
4 |
4 |
|||||
|
|
|
|
где П – периметр полигона ( П = å qi ).
Если замкнутый полигон имеет две узловые точки (рис. 14.10 б), то значение качественной характеристики q1-2 определяется также по формуле (14.6). По той же формуле (14.6) определяется и качественная характеристика эквивалентной секции R-A (рис. 14.10 в). В этом случае полагают ничтожное влияние погрешностей исходных данных того и другого реперов и объединяют их в один, т.е. образуют схему рис. 14.10 а.
359
При преобразованиях «треугольник-звезда» (рис. 14.10 г) образуется условная точка Х (узловая точка), относительно которой получают качественные характеристики для соответствующих условных секций:
q1− X = |
q1 ×q3 |
; |
q2− X = |
q1 ×q2 |
; |
q3− X = |
q2 ×q3 |
, |
(14.8) |
|
|
|
|||||||
|
П1 |
|
П1 |
|
П1 |
|
|||
где П1 = q1 + q2 + q3 – периметр треугольника.
При преобразованиях «звезда-треугольник» (рис. 14.10 д) условными секциями являются стороны образовавшегося треугольника с их качественными характеристиками:
q5− 6 = |
П2 |
; |
q6− 7 = |
П2 |
; |
q5− 7 = |
П2 |
, |
(14.9) |
q |
q |
q |
|||||||
3 |
|
1 |
|
2 |
|
|
|||
где П2 = q1 ∙ q2 + q3 ∙ q1 + q2 ∙ q3 .
Обратите внимаие на то, что при преобразованиях «звезда-треугольник» исключается узловая точка 4.
Решим теперь задачу поиска наиболее слабой точки Е системы нивелирных ходов (рис. 14.9) и ее качественной характеристики qЕ. Здесь логично предположить, что указанная точка Е находится в секции 10-18. При затруднениях в поисках слабой точки задача решается подбором для нескольких точек по нескольким вероятным направлениям до получения максимального значения qЕ.
Предварительно выделим замкнутый контур А (рис. 14.11) и выполним в нем преобразование «треугольник-звезда». При этом секция 3-1 будет иметь качественную характеристику q3− 1 = q14 + q15 = 1+ 1 = 2 .
Рис. 14.11. Преобразование фрагмента А
Используя формулы (14.8), найдем качественные характеристики получившихся секций звезды:
q1− X1 |
= |
|
|
q13 ×q3− 1 |
= |
1×2 |
= |
0,50 |
|||
q13 |
+ q3− 1 + q16 |
4 |
|||||||||
|
|
|
|
|
|
|
|||||
q3− X1 |
= |
|
|
q16 ×q3− 1 |
|
= |
1×2 |
= |
0,50 |
||
|
q13 |
+ q3− 1 + q16 |
|
4 |
|||||||
|
|
|
|
|
|
|
|
||||
q4− X1 |
= |
|
|
q13 ×q16 |
|
|
= |
1×1 |
= |
0,25 |
|
|
q13 |
+ q3− 1 + q16 |
|
4 |
|||||||
|
|
|
|
|
|
|
|
||||
;
;
.
360
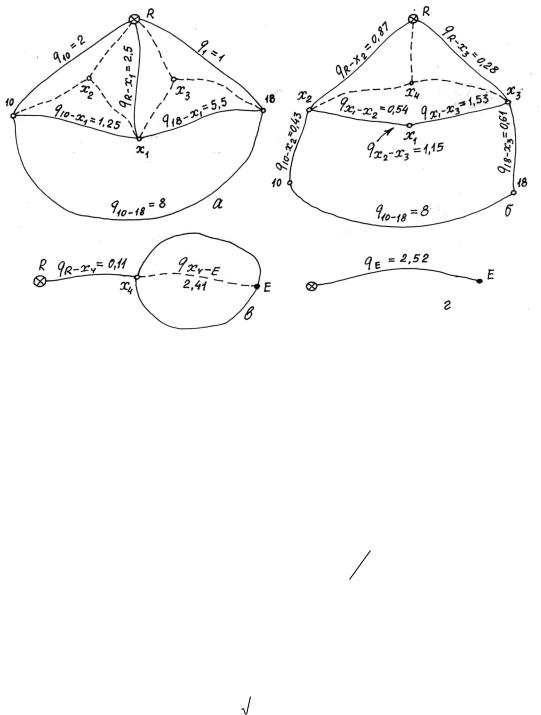
С учетом полученных значений q, а также схемы нивелирных ходов, составим новую схему (рис. 14.12 а – сплошные линии), в которой образуем секции между узловыми точками:
q10− 18 = q9 + q8 + q7 + q6 + q5 + q4 + q3 + q2 = 8 ;
qR− X1 |
= |
q12 |
+ |
q1− X1 |
= |
2,5 ; |
q10− X1 |
= |
q11 |
+ |
q4− X1 |
= 1,25 ; |
|
q18− X1 |
= |
q20 |
+ |
q19 + |
q18 + q17 + q3− X1 = 5,50 . |
|
Рис. 14.12. Преобразование схемы нивелирных ходов
Далее выполним преобразования «треугольник-звезда» в двух треугольниках (R10Х1 и R18Х1). В результате получим схему рис. 14.12б. В этой схеме из треугольника RХ2Х3 образуем звезду с узловой точкой Х4. В результате получим схему рис. 14.12в, которая состоит из секции RX4 и замкнутого полигона, включающего слабую точку Е в ходе Х4-Х2-10-11-12-13-14-15-16- 17-18-Х3-Х4. Периметр этого полигона составит:
П = |
qX 2 − X 4 + q10− X 2 + q9 |
+ q8 + q7 |
+ q6 + q5 + q4 |
+ q3 + q2 + q18− X3 + qX3 − X 4 |
= 9,62 . |
|||||||
С |
учетом |
формулы |
(14.7) |
q |
X 4 |
− E |
= 9,62 |
4 |
= |
2,41, а |
качественная |
|
|
|
|
|
Е, с |
|
qR− X 4 |
|
|
|
|||
характеристика |
слабой |
точки |
учетом |
= |
|
0,11 , составит 2,52 (рис. |
||||||
14.12г).
Требования к точности измерения превышений между отдельными точками в секциях по принятому ходу определяются выражением:
mh = |
M |
|
|
|
|
|
|
, |
(14.10) |
||
|
2qE |
||||
|
|
||||
где mh – требуемая средняя квадратическая погрешность измерения превышений; M – требуемая точность измерения деформации отдельной точки; qE
– качественная характеристика слабой точки схемы.
361