

- •Предисловие
- •Глава 1. Вводная часть
- •§ 1. Предмет и задачи геодезии
- •§ 2. Краткие исторические сведения
- •§ 3. Единицы измерений, применяемые в геодезии
- •§ 4. Фигура и размеры Земли
- •§ 5. Содержание курса и рекомендации по его изучению
- •Глава 2. Топографические карты и планы
- •§ 6. Влияние кривизны Земли на измеренные расстояния
- •§ 7. Краткие сведения о картографических проекциях
- •§ 8. Общие сведения о топографических картах и планах
- •§ 9. Система географических координат
- •§ 10. Равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера
- •§ 11. Разграфка и номенклатура топографических карт и планов
- •§ 12. Зональная система плоских прямоугольных координат Гаусса
- •§ 13. Перевычисление координат из зоны в зону
- •§ 14. Система высот
- •§ 15. Условные знаки топографических карт и планов
- •§ 16. Изображение рельефа на топографических картах и планах
- •§ 17. Ориентирование
- •§ 18. Решение некоторых задач с использованием топографической карты
- •18.1. Измерение расстояний
- •18.2. Определение географических и прямоугольных координат
- •18.3. Ориентирование линий
- •18.4. Ориентирование карты на местности
- •18.5. Определение высот точек
- •18.6. Построение профиля
- •18.7. Построение линии заданного уклона
- •18.9. Определение площадей на топографических картах и планах
- •§ 19. Виды измерений
- •§ 20. Классификация погрешностей измерений
- •§ 21. Свойства случайных погрешностей
- •§ 22. Среднее арифметическое
- •§ 23. Средняя квадратическая погрешность
- •§ 24. Средние квадратические погрешности функций измеренных величин
- •§ 25. Обработка ряда равноточных измерений одной величины
- •§ 26. Об учете систематических погрешностей в измерениях
- •§ 27. Средняя квадратическая погрешность двойных равноточных однородных измерений
- •§ 28. Понятие о весе результата измерения
- •§ 29. Средняя квадратическая погрешность единицы веса и арифметической середины
- •§ 30. Обработка ряда неравноточных измерений одной величины
- •Глава 4. Государственные геодезические сети
- •§ 31. Назначение Государственных геодезических сетей
- •§ 32. Классы геодезических сетей
- •§ 33. Методы построения Государственных геодезических сетей
- •§ 34. Закрепление пунктов геодезических сетей
- •§ 35. Оценка точности построения опорных геодезических сетей
- •§ 36. Оценка точности построения сетей триангуляции
- •§ 37. Оценка точности построения звена полигонометрии
- •§ 38. Оценка точности построения сетей трилатерации
- •Глава 5. Геодезические приборы
- •§ 39. Классификация геодезических приборов
- •§ 40. Теодолиты
- •§ 41. Зрительные трубы
- •§ 42. Уровни и компенсаторы наклона
- •§ 43. Устройство теодолита
- •§ 44. Установка теодолита в рабочее положение
- •§ 45. Измерение горизонтальных углов и углов наклона
- •45.1. Способ приемов
- •45.2. Способ повторений
- •45.3. Способ круговых приемов
- •45.4. Измерение углов наклона
- •§ 46. Поверки теодолитов
- •§ 47. Нивелиры
- •§ 48. Устройство нивелира
- •§ 49. Нивелирные рейки
- •§ 50. Установка нивелира в рабочее положение
- •§ 51. Измерение превышений
- •§ 52. Поверки нивелиров
- •§ 53. Приборы для линейных измерений
- •§ 54. Гироскопические приборы
- •§ 55. Приборы для поиска подземных коммуникаций
- •Глава 6. Оптико-электронные геодезические приборы
- •§ 56. Общие замечания
- •§ 57. Краткие сведения о лазерных источниках излучения
- •§ 58. Электромагнитные дальномеры
- •§ 59. Светодальномеры
- •§ 60. Интерферометры
- •§ 61. Угломерные приборы
- •§ 62. Электронные тахеометры
- •§ 63. Электронные нивелиры
- •§ 64. Лазерные приборы
- •Глава 7. Построение съемочного обоснования
- •§ 65. Назначение и виды теодолитных ходов
- •§ 66. Прямая и обратная геодезические задачи на плоскости
- •§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
- •§ 68. Привязка теодолитных ходов
- •68.1. Способ примыкания
- •68.2. Прямая угловая засечка
- •68.3. Линейная засечка
- •68.4. Обратная угловая засечка
- •68.5. Комбинированные засечки
- •68.6. Задача П.А.Ганзена
- •§ 69. Особые системы теодолитных ходов
- •§ 70. Снесение координат с вершины знака на землю
- •§ 71. Определение элементов приведения и редукции
- •§ 72. Привязка теодолитных ходов к стенным геодезическим знакам
- •§ 73. Спутниковые методы определения координат
- •§ 74. Организация полевых работ при построении съемочного обоснования
- •74.1. Рекогносцировка и закрепление точек съемочного обоснования
- •74.2. Подготовка абрисов горизонтальной съемки
- •74.3. Поверки теодолита и нивелира
- •74.4. Компарирование мерных приборов
- •74.5. Измерение длин линий
- •74.6. Измерение горизонтальных углов и углов наклона
- •§ 75. Вычисления в разомкнутом теодолитном ходе
- •75.1. Предварительные вычисления
- •75.2. Обработка результатов угловых измерений
- •75.3. Вычисление приращений координат и оценка точности хода
- •75.4. Рекомендации к поиску вероятных погрешностей в измерениях и вычислениях при обработке ведомости координат
- •75.5. Уравнивание приращений координат и вычисление координат точек хода
- •75.6. Обработка ведомости высот
- •§ 76. Вычисления в замкнутом теодолитном ходе
- •76.1. Оценка точности угловых измерений и вычисление дирекционных углов
- •76.2. Вычисление приращений координат и оценка точности хода
- •76.3. Уравнивание приращений координат и вычисление координат точек хода
- •76.4. Обработка ведомости высот
- •§ 77. Обработка диагонального хода
- •Глава 8. Топографические съемки
- •§ 78. Назначение и виды топографических съемок
- •§ 79. Понятие о цифровой модели местности
- •§ 80. Теодолитная съемка
- •§ 81. Тахеометрическая съемка
- •§ 82. Составление плана местности по результатам топографической съемки
- •82.2. Нанесение на план точек съемочного обоснования
- •82.3. Нанесение на план результатов тахеометрической съемки
- •82.4. Рисовка рельефа и ситуации
- •82.5. Построение на плане ситуации по результатам теодолитной съемки
- •Глава 9. Нивелирные работы
- •§ 83. Способы и методы нивелирования
- •§ 84. Способы геометрического нивелирования
- •§ 85. Основные источники погрешностей геометрического нивелирования
- •§ 86. Техническое нивелирование
- •§ 87. Трассирование
- •§ 88. Расчет и разбивка главных точек кривых на трассе
- •§ 89. Нивелирование поперечных профилей
- •§ 90. Обработка результатов нивелирования трассы
- •§ 91. Построение профиля трассы
- •§ 92. Построение проектной линии
- •§ 93. Построение поперечного профиля и проектного полотна дороги
- •§ 94. Нивелирование площадей
- •Глава 10. Геодезические разбивочные работы
- •§ 95. Назначение и организация разбивочных работ
- •§ 96. Построение на местности проектного горизонтального угла
- •§ 97. Построение на местности проектного расстояния
- •§ 99. Способы разбивочных работ
- •§ 100. Расчет разбивочных элементов
- •§ 101. Разбивочные работы при трассировании
- •§ 102. Разбивка фундаментов инженерных сооружений
- •§ 103. Оценка точности разбивочных работ
- •Глава 11. Геодезические работы в строительстве
- •§ 104. Общие положения
- •§ 105. Краткие сведения об объектах строительства
- •§ 106. Геодезические работы при строительстве промышленных сооружений
- •§ 107. Геодезические работы при строительстве гражданских зданий
- •§ 108. Геодезические работы при строительстве дорог и мостовых сооружений
- •§ 109. Геодезические работы при планировании и застройке населенных пунктов
- •§ 110. Геодезические работы при строительстве подземных коммуникаций
- •§ 111. Геодезические работы при строительстве гидротехнических сооружений
- •Глава 12. Геодезические работы в подземном строительстве
- •§ 115. Горизонтальная соединительная съемка
- •115.2. Горизонтальная соединительная съемка через один шахтный ствол
- •§ 116. Вертикальная соединительная съемка
- •§ 117. Подземная горизонтальная съемка
- •§ 118. Подземная вертикальная съемка
- •§ 119. Геодезические разбивочные работы в подземном строительстве
- •§ 120. Задачи и содержание топографо-геодезических работ
- •§ 121. Точность геодезических работ
- •§ 122. Создание топографических карт и планов
- •§ 123. Разбивка геодезических сеток и профильных линий
- •§ 124. Разбивочные работы при проведении геологической разведки
- •§ 126. Виды деформаций инженерных сооружений
- •§ 127. Задачи наблюдений и организация работ
- •§ 128. Геодезические знаки и их конструкции
- •§ 129. Размещение геодезических знаков на инженерных сооружениях
- •§ 130. Точность измерения деформаций
- •§ 131. Периодичность наблюдений
- •§ 132. Наблюдения за вертикальными перемещениями
- •§ 133. Наблюдения за горизонтальными смещениями
- •§ 134. Наблюдения за кренами
- •§ 135. Наблюдения за деформациями земной поверхности
- •§ 136. Разработка методики наблюдений
- •§ 137. Обработка и анализ результатов наблюдений
- •Глава 15. Особенности точных и высокоточных измерений
- •§ 138. Основные группы погрешностей измерений
- •§ 139. Учет влияния рефракции атмосферы
- •§ 140. Высокоточное и точное геометрическое нивелирование
- •§ 141. Нивелирование I класса
- •§ 142. Нивелирование II класса
- •§ 143. Нивелирование III и IV классов
- •§ 144. Особенности точного и высокоточного нивелирования при наблюдениях за деформациями
- •§ 145. Высокоточные и точные угловые измерения
- •§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
- •Глава 16. Уравнивание геодезических построений
- •§ 147. Основные задачи уравнительных вычислений
- •§ 148. Метод наименьших квадратов
- •§ 149. Классификация основных способов уравнивания
- •§ 150. Основные геометрические условия, возникающие в построениях
- •150.1. Условие фигуры
- •150.2. Условие горизонта
- •150.3. Условие суммы углов
- •150.4. Условие дирекционных углов
- •150.5. Условие сторон
- •150.6. Условие полюса
- •150.7. Условие координат
- •§ 151. Методы решения систем линейных нормальных уравнений
- •151.1. Способ последовательной подстановки
- •151.2. Способ матричных преобразований
- •151.3. Решение систем линейных уравнений по алгоритму Гаусса
- •151.4. Способ краковянов
- •§ 152. Коррелатный способ уравнивания
- •§ 153. Примеры коррелатного способа уравнивания
- •153.1. Уравнивание углов в полигоне
- •153.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •153.3. Уравнивание полигонометрического хода
- •153.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •153.5. Уравнивание триангуляции
- •153.6. Уравнивание триангуляции по условию координат
- •§ 154. Параметрический способ уравнивания
- •§ 155. Примеры параметрического способа уравнивания
- •155.1. Уравнивание углов в полигоне
- •155.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •155.3. Уравнивание полигонометрического хода
- •155.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •155.5. Уравнивание направлений в триангуляции
- •§ 156. Способ раздельного уравнивания
- •156.1. Уравнивание полигонометрического хода
- •156.2. Система полигонометрических ходов с одной узловой точкой
- •156.3. Система нивелирных ходов с одной узловой точкой
- •§ 157. Способ эквивалентной замены
- •§ 158. Способ полигонов В.В.Попова
- •§ 159. Способ последовательных приближений
- •§ 160. Оценка точности уравненных элементов и их функций
- •160.1. Общие положения
- •160.2. Оценка точности при уравнивании коррелатным способом
- •160.3. Оценка точности при уравнивании параметрическим способом
- •Предметный указатель
- •Список литературы
- •Оглавление
Из решения обратной геодезической задачи дирекционный угол αD3 = =208о05'04"; горизонтальное проложение dD3 = 18,552 м. Превышение h3-D =
=124,65 – 126,05 = -1,40 м.
Горизонтальный угол βD = αD3 - αDC = 208о05'04" – 153о29'05" = 54о35'59". Наклонное расстояние sD3 = 18,605 м.
Точка 4. Выносится на местность способом прямоугольных координат наклонными отрезками sСR (по линии СВ) и sR4 (по перпендикуляру к линии
СВ).
Горизонтальные проложения dСR и dR4 указанных отрезков найдем из
решения системы уравнений |
|
|
X 4 |
= X C + dCR cos α CB + dR4 cos α R4 , |
(10.22) |
Y4 |
= YC + dCR sin α CB + dR4 sin α R4 |
|
где αСВ = 224 о 20' 11"; αК4 = αСВ + 90о = 314 о 20' 11".
После подстановки в уравнения (10.22) всех известных величин получим
dCR = 15,092 м , dR4 = 9,041 м.
С топографического плана получим высоту точки R HR = 122,90 м. Следовательно, hR-C = -0,45 м , h4-R = +0,45 м.
Наклонные расстояния sСR = 15,099 м, sR4 = 9,052 м.
После выноса на местность точек 1, 2, 3 и 4 выполняют контрольные промеры расстояний 1-2, 2-3, 3-4 и 4-1 с определением соответствующих горизонтальных проложений и сравнивают полученные значения с проектными. Кроме того, в точках 1, 2, 3 и 4 измеряют теодолитом проектные горизонтальные углы (90о).
Точка М. Вынос точки на проектную высоту (123,45 м, табл. 10.3) осуществляется с точки С с контрольным определением ее значения с исходной точки D.
Вычисляют проектное превышение hМ-С(ПР)= НМ(ПР) – НС =123,450–123,357 =
=+ 0,093 м и контрольное проектное превышение hМ-D(ПР) = НМ(ПР) – НD = =123,450 – 126,050 = - 2,600 м.
Нивелир устанавливают посредине между точками С и М и выполняют построение проектной отметки в соответствии с правилами, изложенными в § 98.
Аналогичные работы выполняют и при контрольной проверке построения проектной высоты с точки D. Однако здесь следует иметь ввиду, что, скорее всего, с одной станции невозможно будет увидеть обе рейки, установленные в точках D и М, поскольку превышение между этими точками значительное, почти равно длине нивелирной рейки. В этом случае поверка построения высоты выполняется двумя станциями (ходом) через иксовую точку. Суммарное превышение (hx-D + hM-x) должно соответствовать проектному превышению hM-D(ПР).
§101. Разбивочные работы при трассировании
Вглаве 9 были рассмотрены вопросы нивелирования трассы, например, при строительстве дороги. Перед выполнением нивелирования производят
284
разбивку пикетажа, для чего используется теодолит и мерный прибор (дальномер, светодальномер, рулетка), либо только электронный тахеометр.
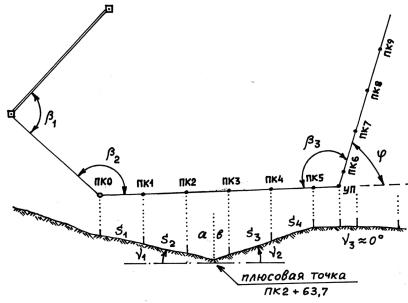
Для задания направления трассы от какого-либо исходного направления вычисляют проектное значение угла β и строят этот угол на местности, т.е. задают начальное направление трассы от пикета ПК) до первого угла ее поворота УП (рис. 10.15).
Рис. 10.15. Разбивочные работы при трассировании линейных сооружений.
Расстояние между пикетами соответствует 100 м в горизонтальном проложении (либо другому установленному расстоянию, например, 50 м). В связи с тем, что местность может иметь наклон к плоскости горизонта, в проектное расстояние вводят поправку за наклон. При перегибах местности между пикетами (например, между пикетами ПК2 и ПК3) поправки за наклон вводят для каждого из наклонных отрезков с учетом углов наклона ν1 и ν2.
По мере удаления трассы от пикета ПК) створ линии задают теодолитом, последовательно перемещая его на другие пикеты, с визированием на удаленный задний пикет отсчетом по горизонтальному кругу 0о. В этом случае продолжение створа будет соответствовать отсчету по горизонтальному кругу 180о.
В точке угла поворота УП выполняют разбивку кривой заданного радиуса. Основные элементы кривой вычисляют по формулам (9.25) – (9.29).
В процессе разбивки кривой все пикеты за углом поворота следует переместить вперед на величину домера (Д), поскольку длина кривой всегда меньше двух ее тангенсов (Т).
Детальная разбивка кривой может выполняться несколькими способами (рис. 10.16).
285
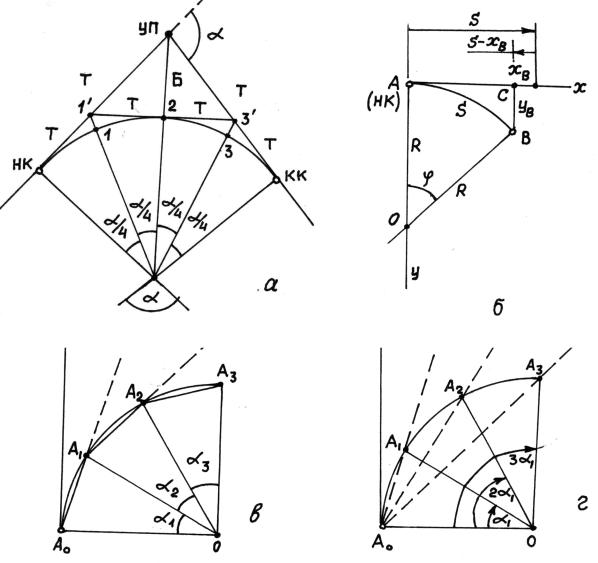
Рис. 10.16. Детальная разбивка кривых на трассе а) разбивка кривой по частям; б) способ координат; в) способ хорд; г) способ углов
При разбивке кривой по частям (рис. 10.16 а) всю ее, от начала кривой (НК) до конца кривой (КК), делят на две одинаковые кривые: НК-М и М-КК. Для каждой из них производят детальную разбивку, принимая значения НК1' = 1'2 = 23' = 3'КК = Т. При этом значение Т вычисляют по формуле
Т = R ×tg |
α . |
(10.23) |
|
4 |
|
Точки 1' и 3' находятся на линиях НК-УП и КК-УП.
После построения точек 1' и 3' каждую из кривой разбивают способом координат (рис. 10.16 б).
В способе координат положение любой из точек кривой получают в условной системе прямоугольных координат хоy. Ось y – направление от начала кривой к ее центру 0; ось х – направление тангенса (Т), т.е. кассательной в точке начала кривой.
Координаты точки В, которая находится на расстоянии s, будут равны
286

хВ = R ×sin ϕ ; |
yB |
= R(1 − cos ϕ ) = 2R ×sin 2 ϕ |
, |
(10.24) |
|
|
2 |
|
|
где ϕ = Rs ρ ; ρ- радиан.
При радиусах до 500 м разбивку кривой ведут через 10 м, а при больших радиусах – через 20 м.
Технология разбивки следующая. От точки А рулеткой по направлению тангенса, задаваемому теодолитом, откладывают отрезок s. Находят разность (s – x) и откладывают ее в обратном направлении. В полученной точке устанавливают теодолит и строят им угол 90о от направления тангенса (линия СВ). Затем по направлению СВ откладывают координату у.
Схема разбивки кривых способом хорд (продолженных или последовательных) представлена на рис. 10.16 в).
При детальной разбивке кривой отрезки (хорды) АоА1 = А1А2 = А2А3 = а. Вообще говоря, значение а может быть и произвольным, но не более длины имеющейся рулетки. Для точки А1
|
|
|
|
yA1 |
= |
a 2 |
; xA1 |
= a − |
y2 |
, |
(10.25) |
||
или |
|
|
2R |
2a |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
α 1 |
|
|
|
|
|
|
|
|
|
|
yA1 = |
2R sin |
2 |
; |
xA1 = |
R ×sin α 1 , |
(10.26) |
|||
|
α 1 |
|
2 |
||||||||||
|
|
a |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
где sin |
|
= |
|
. |
|
|
|
|
|
|
|
|
|
2 |
2R |
|
|
|
|
|
|
|
|
|
|||
Точки К1 и К2 и т.д. на кривой можно построить способом линейной засечки. По линии АоВо следует отложить хорду а до точки В1, а затем из нее отрезком 0,5s и из точки Ао отрезком а получить положение точки К1. В этом
случае s = aR2 .
Чтобы построить точку А2 продолжают линию АоА1 на расстояние а (А1А 2= а). Из точки А1 радиусом а и из точки А2' радиусом s засекают положение точки А2. Последующие точки получают аналогично.
При детальной разбивке способом углов (рис. 10.16 г) на кривой получают равноотстоящие друг от друга точки А1, А2, …, как и в способе хорд. Для этого в точке Ао устанавливают теодолит и ориентируют 0о горизонтального круга по направлению АоВо (по линии тангенса). Затем устанавливают по горизонтальному кругу отсчет 0,5α1 и в этом направлении откладывают хорду а (в точке А1). Далее снова по горизонтальному кругу устанавливают отсчет 2(0,5 α1), один конец рулетки фиксируют в точке А1, а другой ее конец на отсчете а совмещают в изображении через зрительную трубу теодолита с вертикальной нитью (точка А2) по команде наблюдателя. По аналогии с точкой А2 достраиваются остальные точки, изменяя каждый раз отсчет по горизонтальному кругу на 0,5α1. Такие же действия выполняют и из точки КК конца кривой.
Способ стягивающей хорды (рис. 10.17) используют обычно в тех случаях, когда радиус кривой слишком большой, а также в тех случаях, когда нет доступа к центру кривой и для построения переходных кривых.
287
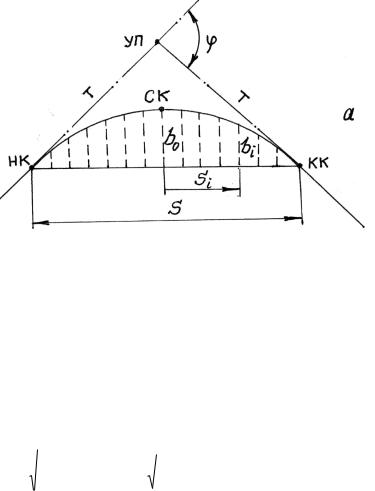
Рис. 10.17. Способ стягивающей хорды
При разбивке круговых кривых разбивочные работы выполняют по частям, короткими хордами, либо длинными хордами, но с учетом уклонения кривой от ходы. Если задаться значением угла φ , то можно определить длину хорды
S = 2R ×sin |
ϕ |
, |
(10.27) |
|
2 |
|
|
а величину стрелки прогиба bo в середине кривой – по формуле
|
|
æ |
S ö |
2 |
|
|
|
|
|
|
|
ϕ |
|
|
|
|
2 |
|
2 |
|
2 |
|
2 ϕ |
|
|
(10.28) |
|||||
bo = R - R |
|
- ç |
|
÷ |
= R - |
R |
|
- R |
|
sin |
|
= R(1- cos |
|
) |
|
|
2 |
|
|
2 |
2 |
||||||||||
|
|
è |
ø |
|
|
|
|
|
|
|
|
|
|||
Величины стрелок прогиба bi получают по приближенной формуле:
bi = bo − |
Si |
(10.29) |
|
2R |
|||
|
|
через шаг в 2 м по обе стороны от стрелки bo. Поскольку круговая кривая симметричная, то величины рабочих промеров от середины кривой при равных шагах разбивки по обе стороны будут одинаковыми.
Переходные кривые выполняют в местах сопряжения круговых кривых с прямолинейными участками с целью ослабления резких ударов на поворотах при больших скоростях от действия центробежной силы. Для этого в местах сопряжений делают вставку (рис. 10.18), радиус которой изменяется от бесконечности (на прямой) до радиуса круговой кривой. После перехода через круговую кривую радиус изменяется соответственно от радиуса кривой до бесконечности.
Чаще всего для переходных кривых используют радиальную кривую (спираль), уравнение которой имеет вид
288