


§ 85. Основные источники погрешностей геометрического нивелирования
На точность определения превышений влияют многочисленные факторы, среди которых основными являются: влияние кривизны Земли и рефракции атмосферы; невыполнение главного условия нивелира; погрешности отсчетов по шкалам реек; погрешности установки зрительной трубы; погрешности в нанесении делений шкал реек и др.
Рассмотрим влияние указанных погрешностей и факторов на точность нивелирования.
1. Влияние кривизны Земли.
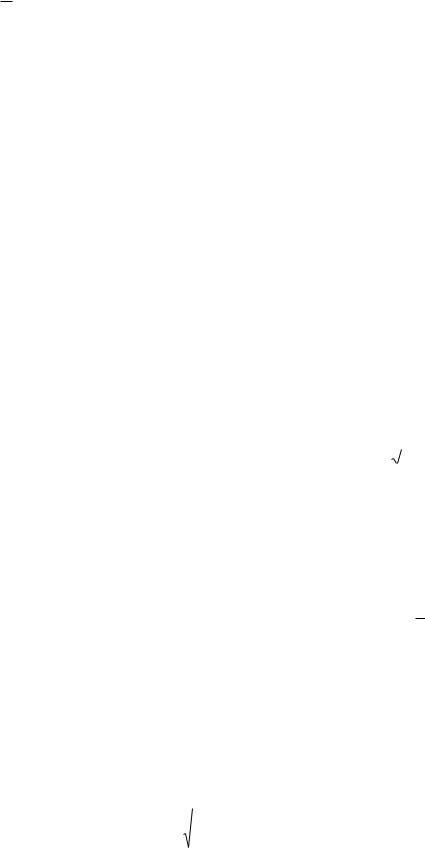
На физической поверхности Земли на расстоянии L находятся точки А и В, превышение между которыми равно h (рис. 9.3).
Рис. 9.3. Погрешности нивелирования из-за влияния кривизны Земли, рефракции и невыполнения главного условия нивелира
Установим нивелир точно посредине между точками А и В и возьмем отсчеты по рейкам, полагая, что световой луч (1) в направлении визирной оси распространяется в атмосфере прямолинейно. Для правильных отсчетов по рейкам следовало бы потребовать, чтобы световой луч проходил по уровенной поверхности, определяемой высотой прибора, т.е. по пути (2). В этом
случае превышение между точками будет соответствовать истинному: |
|
hист = З2 – П2 |
(9.13) |
На самом деле мы имеем |
|
h1 = З1 – П1 |
(9.14) |
243

Очевидно, что для симметричной схемы погрешности в отсчетах по рейкам ∆З1 = З1 – З2 и ∆П1 = П1 – П2 , определяемые влиянием кривизны Земли, будут одинаковыми, поскольку LA = LB. Следовательно,
h = (З2 + З1 ) − (П2 + П1 ) = З2 − П2 |
(9.15) |
При нивелировании вперед (рис. 9.3 б) ∆З1 значительно меньше ∆П1, в связи с чем погрешность ∆П1 полностью входит в значение измеренного превышения.
Таким образом, при нивелировании из середины влияние кривизны Земли, как систематическая погрешность, исключается в разности отсчетов по рейкам.
Величина погрешности k из-за кривизны Земли в отсчете по рейке, находящейся на расстоянии L от нивелира, может быть оценена по формуле
k = |
L2 |
, |
(9.16) |
|
2R |
||||
|
|
|
где R – радиус Земли.
Указанная погрешность при нивелировании может быть определена практически с любой точностью с учетом эллиптичности Земли, т.е. с учетом параметров референц-эллипсоида Красовского. Данные вопросы рассматриваются подробно в курсе высшей геодезии.
2. Влияние рефракции атмосферы.
Визирные лучи (3), проходя в атмосфере через слои воздуха, имеющие разную плотность, искривляются, отклоняясь в сторону земной поверхности. Погрешность в отсчете, вызванная влиянием рефракции атмосферы, r = (З3 – З2 ), r = (П3 – П2), может быть оценена по приближенной формуле
r = 0,07 |
L2 |
(9.17) |
|
R |
|||
|
|
Если условия измерений стабильны для визирных лучей в направлениях А и В, то можно полагать, что при симметричной схеме измерений погрешность из-за рефракции атмосферы исключается в разности отсчетов, как и при влиянии кривизны Земли. Часто погрешности k и r объединяют и определяют общую погрешность влияния кривизны Земли и рефракции
f = 0,43 |
L2 |
(9.18) |
|
R |
|||
|
|
Приведем в качестве сравнительных характеристик значения погрешностей k и r и суммарной погрешности f для радиуса Земли R = 6371,11 км и различных расстояний L от нивелира до рейки (табл. 9.1)
|
|
|
|
|
|
|
|
Таблица 9.1 |
L |
10 |
50 |
100 |
200 |
300 |
400 |
500 |
1000 |
k |
0,0078 |
0,196 |
0,785 |
3,14 |
7,06 |
12,56 |
19,62 |
78,45 |
r |
0,0011 |
0,027 |
0,110 |
0,44 |
0,99 |
1,76 |
2,75 |
10,99 |
f |
0,0067 |
0,169 |
0,675 |
2,70 |
6,07 |
10,80 |
16,87 |
67,49 |
Как видно из этой таблицы, уже при расстояниях 100 м погрешность изза влияния кривизны Земли составляет почти 1 мм. Погрешность из-за
244
влияния рефракции атмосферы имеет знак, обратный знаку погрешности изза кривизны Земли, в связи с чем общая погрешность отклонения отсчета от истинного меньше, чем k.
При нивелировании из середины (при симметричной схеме) rЗ = rП , т.е. исключаются из значения полученного превышения, а при нивелировании вперед rЗ значительно меньше rП, что приводит к погрешности в определении превышения.
Таким образом, при нивелировании из середины влияние рефракции атмосферы, как систематическая погрешность, значительно ослабляется и во многих случаях исключается в разности отсчетов по рейкам.
3. Невыполнение главного условия нивелира.
Если в нивелире не выполняется главное условие, т.е. после установки нивелира в рабочее положение визирный луч (4) занимает не горизонтальное положение, а отклонен от него на угол i, то отсчеты по рейкам будут равны З4 и П4. Разность отсчетов (З4 – З1) и (П4 – П1) характеризуют погрешность изза невыполнения главного условия нивелира. Ее величина может быть оценена по формуле
u = i |
L |
, |
(9.19) |
|
ρ |
||||
|
|
|
где ρ = 206265".
При нивелировании из середины, при использовании симметричной схемы измерений, погрешности в отсчетах по рейкам из-за невыполнения главного условия нивелира будут одинаковыми и исключатся в разности отсчетов. При нивелировании вперед превышение будет содержать систематическую погрешность, если визирная ось зрительной трубы не будет при измерениях совпадать с горизонтальной плоскостью.
Таким образом, при нивелировании из середины остаточным невыполнением главного условия нивелира можно пренебречь.
Вообще говоря, при любом неравенстве плеч на станции, если остаточная погрешность в превышении будет больше установленного допуска, схему измерений следует характеризовать как нивелирование вперед.
Рассмотрим пример оценки влияния погрешностей k, r и u на результат измерения превышения.
Пример 9.1. Оценка влияния кривизны Земли, рефракции атмосферы и невыполнения главного условия нивелира на результаты измерения превышений при разных плечах на станции.
Исходные данные. Предположим, что точки А и В находятся на расстоянии 100 м друг от друга. Неравенство плеч на станции равно 20 м (LA = 40 м; LB = 60 м). Угол i = 10". Заданная точность определения превышения mh = 1 мм. Требуется оценить возможность обеспечения указанной точности измерений при данном неравенстве плеч.
Решение.
По формуле (9.16)
k = kB − kA = |
L2B − L2A |
= 0,16мм |
|
2R |
|||
|
|
По формуле (9.17)
245
r |
= |
r |
− r = 0,07 |
L2B − L2A |
= 0,02мм |
|
|||||
|
B |
A |
R |
|
|
|
|
|
|
|
По формуле (9.19)
u = uB − uA = ρi (LB − LA ) = 0,97 мм
Как следует из результатов оценки, при разности плеч в 20 м практически можно пренебречь влиянием рефракции атмосферы, влияние кривизны Земли можно считать пренебрегаемо малым, а вот невыполнение главного условия нивелира вызывает погрешность того же порядка, что и заданная точность измерения превышения.
В таких случаях необходимо оценить допустимую величину разности плеч на станции, при которой погрешность из-за невыполнения главного условия составляла бы 1:3 ...
1:5 от заданной (допустимой) погрешности измерений, т.е. была бы пренебрегаемо малой. Примем ∆u = 0,2mh = 0,2 мм. Тогда
L |
|
= (L |
|
− L |
|
) = |
|
ρ |
≈ 4м |
|
ДОП |
B |
A |
u i |
|||||||
|
|
|
|
|
||||||
Очевидно, что при такой разности плеч погрешности из-за влияния кривизны Земли и рефракции атмосферы практически будут равны нулю.
4. Погрешность установки зрительной трубы.
Погрешность обусловлена неточностью установки пузырька цилиндрического уровня в нульпункте, а также недостаточной чувствительностью уровня к малым перемещениям трубы элевационным винтом.
Принимая погрешность установки пузырька уровня mτ = 2" (для контактных уровней), расстояние от нивелира до реек L = 100 м, определим значение вероятной погрешности в отсчете
D τ |
= |
mτ |
L = 0,96 мм |
(9.20) |
||
ρ |
||||||
|
|
|
|
|
||
Для превышения, определяемого разностью отсчетов, ∆h(τ) = |
|
∙0,96 мм = |
||||
2 |
||||||
=1,35 мм.
5.Погрешность отсчета по рейке - mтр.
Указанная погрешность определяется недостаточной разрешающей способностью зрительной трубы нивелира:
mтр |
60′′ L |
, |
(9.21) |
|
ρ Г х |
где Гх – увеличение зрительной трубы. Предположим, что для тех же условий
измерений Гх = 25х. Тогда mтр = 1,16 мм, а для превышения ∆h(тр) = 
 2 ∙1,16 мм = 1,64 мм .
2 ∙1,16 мм = 1,64 мм .
6.Погрешность в отсчете из-за наклона рейки.
Очевидно, что чем больше наклон рейки, тем больше будет и погрешность отсчета. Предположим, что рейка отклонилась от вертикального положения на угол α (рис. 9.4). Визирный луч находится на высоте ао, соответствующей вертикальному положению рейки. Из-за наклона по рейке читается отсчет а. Погрешность из-за наклона рейки может быть получена по формуле
|
|
æ |
|
|
|
|
ö |
|
|
|
|
|
|
α |
2 |
, |
(9.22) |
||
D Н |
= ao |
ç |
1 + |
2 |
- 1 |
||||
|
|
ç |
|
|
ρ |
|
|
|
|
|
|
è |
|
|
|
|
ø |
|
|
246