

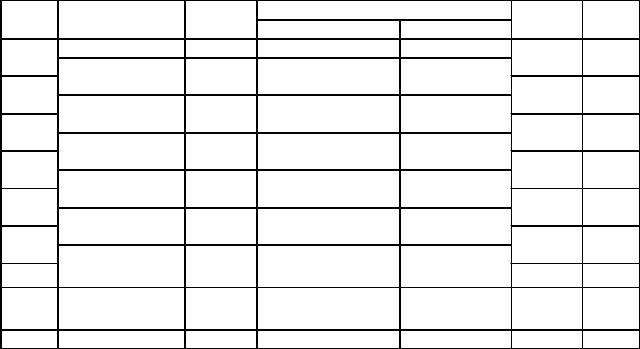
После этого, по формулам (7.92), с учетом исправленных значений превышений, вычисляют высоты точек теодолитного хода с определением контрольного значения высоты конечной точки хода
Н КВЫЧ = Н КИСХ . |
(7.99) |
Пример обработки ведомости высот приведен в табл. 7.8 для схемы рис. 7.23.
Пример 7.16. Обработка ведомости высот разомкнутого теодолитного хода.
В схеме теодолитного хода наведение на веху, установленную в последующей точке, выполнено на высоту прибора, в связи с чем вычисление превышений производилось по формуле (7.91).
Поправки в превышения записаны в ведомости над значениями вычисленных превышений.
Жирным шрифтом выделены исходные данные.
|
|
|
|
|
|
Таблица 7.8 |
|
|
Ведомость высот разомкнутого теодолитного хода |
|
|||||
№№ |
Горизонтальные |
Углы |
|
Превышения |
Высоты |
№№ |
|
точек |
проложения, м |
наклона |
вычисленные |
исправленные |
точек, м |
точек |
|
А |
189,04 |
+4о36,5' |
(-0,02) |
+15,22 |
142,75 |
A |
|
|
|
|
|||||
1 |
113,86 |
+2о27,0' |
+15,24 |
|
157,97 |
1 |
|
|
(-0,02) |
+4,85 |
|
|
|||
2 |
121,57 |
-0о43,7' |
+4,87 |
|
162,82 |
2 |
|
|
(-0,02) |
-2,60 |
|
|
|||
3 |
93,39 |
-2о11,3' |
-2,58 |
|
160,22 |
3 |
|
|
(-0,01) |
-3,58 |
|
|
|||
4 |
163,61 |
+4о08,0' |
-3,57 |
|
156,64 |
4 |
|
|
(-0,02) |
+11,80 |
168,44 |
|
|||
D |
|
|
+11,82 |
|
D |
||
|
å d = 681 ,47 |
|
å hВЫЧ |
= + 25,78 |
|
|
|
|
м |
|
å hТЕОР |
м |
|
|
|
|
|
|
= + 25,69 |
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
fh =+0,09 м |
fhДОП=±0,12 м |
|
|
|
§ 76. Вычисления в замкнутом теодолитном ходе
Замкнутый теодолитный ход во многом является частным случаем разомкнутого теодолитного хода, полагая в последнем ХН = ХК, YH = YK, HH =HK. Одной из особенностей замкнутого хода является возможность контроля результатов полевых измерений, а также оценки точности без привлечения процедуры привязки к исходным геодезическим пунктам геодезической основы (геодезической опорной сети). В соответствии с этим несколько изменим порядок обработки указанного вида теодолитных ходов.
213
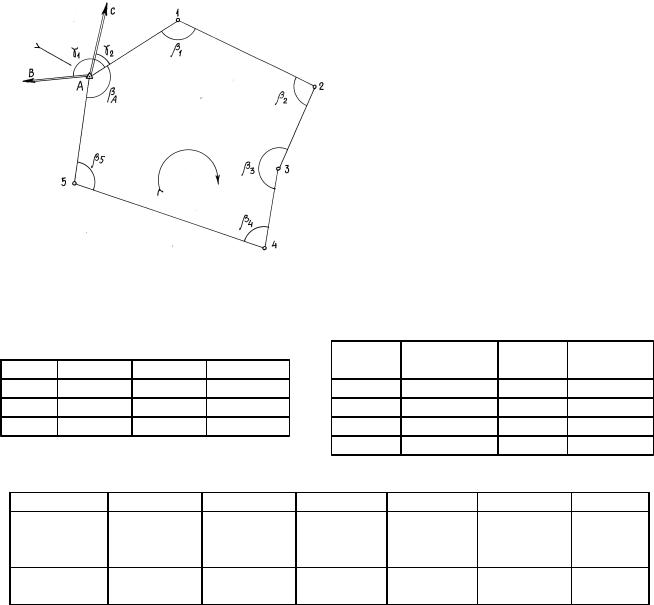
Пояснения по обработке замкнутого теодолитного хода рассмотрим совместно с примером, соответствующим схеме замкнутого хода, приведенной на рис. 7.26.
Рис. 7.26. Замкнутый теодолитный ход
представлены в табл. 7.10 и 7.11.
|
Таблица 7.9 |
|
|
Точки |
А |
В |
С |
Х, м |
4216,563 |
6692,552 |
5594,790 |
Y, м |
7018,427 |
5172,041 |
11036,256 |
Н, м |
111,65 |
- |
- |
Исходные данные. Запроектирован замкнутый теодолитный ход повышенной точности (допустимая относительная погрешность 1:7500). Горизонтальные углы измерены теодолитом Т5. Длины линий измерены светодальномером с относительной погрешностью 1:10000. Углы наклона измерены теодолитом Т5 с округлением результатов до 0,1'. Допустимая угловая невязка в полигоне не более ± 10′′
 n . Координаты исходных пунктов Государственной геодезической сети представлены в таблице 7.9. Результаты измерений
n . Координаты исходных пунктов Государственной геодезической сети представлены в таблице 7.9. Результаты измерений
|
Таблица 7.10 |
|
|
Обозна- |
Значение |
Обозна- |
Значение |
чение |
угла |
чение |
угла |
γ 1 |
154о25'00,0" |
β 2 |
90о40'30" |
γ 2 |
46о38'15,6" |
β 3 |
191о46'25" |
β А |
127о14'05" |
β 4 |
85о10'00" |
β 1 |
124о13'05" |
β 5 |
100о54'10" |
|
|
|
Таблица 7.11 |
|
|
|
Параметр |
А-1 |
1-2 |
2-3 |
3-4 |
4-5 |
5-А |
Наклонные |
|
|
|
|
|
|
расстояния |
77,396 |
109,891 |
64,282 |
56,143 |
142,789 |
77,906 |
S, м |
|
|
|
|
|
|
Углы |
-2о00,5' |
+1о16,3' |
+4о25,6' |
-3о38,8' |
+0о46,5' |
-2о12,4' |
наклона, ν |
|
|
|
|
|
|
Из решения обратных геодезических задач по дирекционным углам исходных направлений и значениям примычных углов вычислен дирекционный угол линии теодолитного хода А-1: αА1 = 117о42'15,2". Аналогичные вычисления дирекционных углов линий теодолитного хода при его азимутальной привязке были выполнены при обработке разомкнутого теодолитного хода (§ 75). В данном случае необходимо определить только значение дирекционного угла одной линии теодолитного хода.
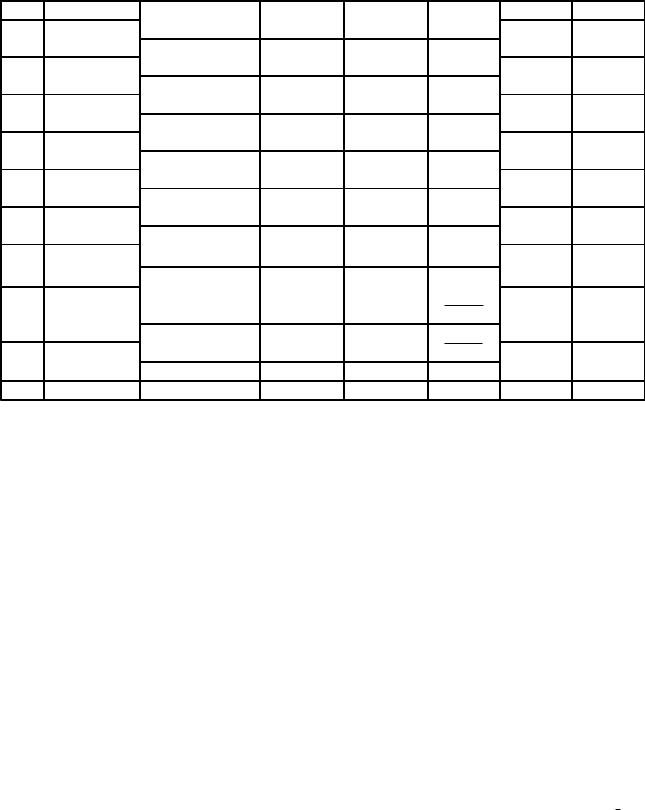
Пример обработки ведомости координат замкнутого теодолитного хода приведен в табл. 7.12.
214

76.1. Оценка точности угловых измерений и вычисление дирекционных углов
В замкнутом теодолитном ходе (полигоне) могут быть измерены внутренние, либо внешние горизонтальные углы β (рис. 7.26). Если принять направление обхода по часовой стрелке, то все внутренние горизонтальные углы, показанные на схеме, будут правыми по ходу.
Теоретическая сумма горизонтальных углов замкнутого многоугольника равна:
- для внутренних углов:
å β ТЕОР |
= 180 0 (n − 2) ; |
(7.100) |
- для внешних углов: |
|
|
å β ТЕОР |
= 180 0 (n + 2) , |
(7.101) |
где n – число измеренных внутренних или внешних углов.
Угловая невязка в этом случае может быть определена по формуле
fβ = å β ИЗМ − å β ТЕОР . |
(7.102) |
В дальнейшем обработка результатов угловых измерений подобна обработке результатов угловых измерений разомкнутого теодолитного хода: вычисление допустимой угловой невязки по формуле (7.69); проверка условия (7.70); вычисление поправок в углы и контроль их вычисления по формулам (7.71) и (7.72); исправление углов по формуле (7.73) и контроль их исправления по соблюдению равенства
å β ИСПР = å β ТЕОР . |
(7.103) |
Дирекционные углы линий замкнутого теодолитного хода вычисляют последовательно по ходу с контрольным вычислением дирекционного угла его линии, вычисленного при азимутальной привязке. Так, следуя обозначениям на схеме рис. 7.26 и принятому направлению хода,
α 23 |
= α 12 |
± 180 0 |
− |
β 2ИСПР |
|
α 12 |
= α А1ИСХ ± 180 0 − β 1ИСПР |
|
|||
α 34 |
= α 23 |
± 180 0 |
− |
β 3ИСПР |
|
α 45 = α 34 ± 180 0 − |
β 4ИСПР |
(7.104) |
|||
α 5 А = α 45 |
± 180 0 |
− |
β 5ИСПР |
|
|
α А1ВЫЧ = α 5 А ± 180 0 − β АИСПР
Контрольное значение дирекционного угла, полученное по последнему выражению формул (7.104) для линии А1 должно точно соответствовать его исходному значению.
Таблица 7.12
Пример. 7.17.
Ведомость координат замкнутого теодолитного хода
№ |
Горизонтал |
Дирекцион- |
Горизон- |
Приращения |
Координаты, м |
|||
№ |
ьные углы |
ные углы |
тальные |
координат, м |
|
|
||
то- |
β |
α |
проложе- |
(поправки) |
|
|
|
|
чек |
(поправки) |
|
ния, м |
Х |
|
Y |
X |
Y |
|
|
|
d |
|
|
|
|
|
А |
|
|
|
|
|
|
4216,563 |
7018,427 |
215
1 |
|
117о42'15,2" |
77,348 |
(-0,005) |
(-0,006) |
|
|
(+3,1") |
|
|
-35,960 |
+68,481 |
4180,598 |
7086,902 |
|
2 |
124о15'12" |
173о27'00,1" |
109,854 |
(-0,007) |
(-0,009) |
|
|
(+3,2") |
|
|
-109,137 |
+12,531 |
4071,454 |
7099,424 |
|
3 |
90о40'14" |
262о46'42,9" |
64,090 |
(-0,004) |
(-0,005) |
|
|
(+3,3") |
|
|
-8,056 |
-63,582 |
4063,394 |
7035,837 |
|
4 |
191о46'32" |
251о00'07,6" |
56,029 |
(-0,004) |
(-0,005) |
|
|
(+3,2") |
|
|
-18,239 |
-52,977 |
4045,151 |
6982,855 |
|
5 |
85о09'36" |
345о50'28,4" |
142,786 |
(-0,009) |
(-0,013) |
|
|
(+3,1") |
|
|
+138,448 |
-34,927 |
4183,590 |
6947,915 |
|
А |
100о54'12" |
64о56'13,3" |
77,848 |
(-0,005) |
(-0,006) |
4216,563 |
7018,427 |
(+3,1") |
|
å d |
+32,978 |
+70,518 |
|||
|
127о13'55" |
117о42'15,2" |
fX |
fY |
|
|
|
1 |
å β ИЗМ |
|
527,955 |
+0,034 |
+0,044 |
|
|
|
719о59'41" |
|
|
fАБС |
fОТН = |
|
|
|
å β ТЕОР |
|
|
0,0556 |
1 |
|
|
|
720о00'00" |
|
|
fОТН ДОП |
9500 |
|
|
fβ |
-19" |
|
|
1 |
|
|
|
|
|
|
7500 |
|
|
||
fβ доп |
± 24" |
|
|
|
|
|
|
76.2. Вычисление приращений координат и оценка точности хода
Поскольку начальная и конечная точки замкнутого теодолитного хода совмещены, то, как следует из формул (7.77), теоретические суммы приращений координат, вычисленных из решения прямой геодезической задачи, должны быть равны нулю, т.е.
å Х ТЕОР = 0 ; å YТЕОР = 0 , |
(7.105) |
а невязки в приращениях координат определятся только суммами полученных соответствующих приращений
f X = å X ВЫЧ ; fY = å YВЫЧ . |
(7.106) |
Далее оценка точности хода заключается в вычислении абсолютной невязки хода (7.80), относительной невязки хода (7.81) и в сравнении последней с допустимой относительной невязкой, установленной для данного вида работ соответствующей инструкцией или техническим заданием.
По аналогии с разомкнутым теодолитным ходом физический смысл невязок в приращениях координат тот же (рис. 7.24 б).
76.3. Уравнивание приращений координат и вычисление координат точек хода
Поправки в приращения координат (весовые) вычисляются по формулам (7.84) с контролем их вычислений по формулам (7.85). Контрольные суммы исправленных (7.86) приращений координат для замкнутого теодолитного хода должны быть равны нулю, т.е.
å Х ИСПР = 0 ; å YИСПР = 0 . |
(7.107) |
216