

-длина диагонального хода не должна превышать 0,5 максимальной длины хода; относительная погрешность диагонального хода не должна быть больше 1:1000;
-углы в теодолитных ходах измеряют теодолитом не менее 30-секундной точности одним полным приемом с перестановкой лимба между полуприемами примерно на 90о; при измерении углов теодолитами типа Т5 лимб между полуприемами переставляют примерно на 1о – 2о; разница значений углов, полученных в полуприемах не должна превышать 45";
-центрирование в вершине измеряемого угла выполняется с помощью отвеса или оптического центрира с погрешностью не более 3 мм;
-линии в ходах измеряют стальными лентами или рулетками в прямом и обратном направлениях с установленной относительной погрешностью, либо
впрямом направлении при использовании оптических дальномеров и светодальномеров.
§66. Прямая и обратная геодезические задачи на плоскости
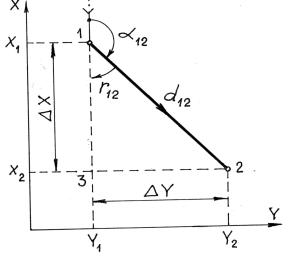
Пусть нам известны координаты точки 1 (Х1, Y1), горизонтальное проложение линии 1-2 d12 и ее дирекционный угол α12 (рис. 7.3). Требуется найти координаты точки 2. Таковы условия прямой геодезической задачи.
|
|
Прямая геодезическая задача ис- |
||
|
|
пользуется для определения коорди- |
||
|
|
нат точек местности, в частности, при |
||
|
|
определении координат точек теодо- |
||
|
|
литных ходов. |
|
|
|
|
Поскольку указанная задача ре- |
||
|
|
шается на плоскости (в проекции |
||
|
|
Гаусса-Крюгера), то треугольник 123 |
||
|
|
является прямоугольным. Линия 1-2 |
||
|
|
ориентирована (на рисунке) в круго- |
||
|
|
вой (α) и четвертной (r) системах. |
||
|
|
Параметры |
Х и |
Y называют |
Рис. 7.3. Прямая и обратная геодезические |
приращениями координат. |
|||
Исходя из геометрии и принятой |
||||
задачи на плоскости |
|
системы координат можно записать, |
||
|
|
что |
|
|
X 2 |
= X1 |
− X |
|
(7.1) |
Y2 |
= Y1 + |
Y |
|
|
|
|
|||
Очевидно, что приращения координат должны иметь знак «плюс» или «минус», поскольку координаты точки 2 могут быть больше или меньше координат точки 1. Не обращая внимания на знаки приращений координат, запишем из прямоугольного треугольника
X = d12 cos r12 |
(141) |
|
Y = d12 sin r12 |
||
|
||
Принимая во внимание схему рис. 2.19, запишем, что |
|
168
X = d12 cos α Y = d12 sin α
12 , |
(142) |
12 |
|
т.е. знаки приращений координат определяются знаками функций sin и cos соответствующих дирекционных углов. Тогда для общего случая формулы (7.1) примут вид
X 2 |
= X1 + |
|
X |
(7.4) |
Y2 |
= Y1 + |
Y |
|
|
|
|
Пример 7.1. Прямая геодезическая задача.
Исходные данные: Х1 = 4256,324 м; Y1 = 7830,042 м; α12 = 248о39'42"; d12 = 211,656 м. Найти координаты точки 2.
Решение.
X 2 |
= |
211,656 ×cos 248 039′42′′ = |
− 77,016 м; |
||
Y2 |
= |
211,656 ×sin 248 039′42′′ = |
− 197,147 м; |
||
X 2 |
= |
4256 ,324 − 77,016 = |
4179 ,308 м |
||
Y2 |
= |
7830 ,042 − 197 ,147 = |
7632 ,895 м. |
||
Формулировка обратной геодезической задачи: по известным координатам двух точек найти горизонтальное проложение линии, соединяющей эти точки и ее дирекционный угол.
Применительно к рис. 7.3: по известным координатам точек 1 и 2 найти горизонтальное проложение d12 и дирекционный угол α12.
Обратная геодезическая задача используется в большом числе случаев при определении дирекционных углов исходных направлений, а также при решении различных геометрических задач на местности, связанных с построением на местности проектных точек инженерных сооружений (геодезические разбивочные работы).
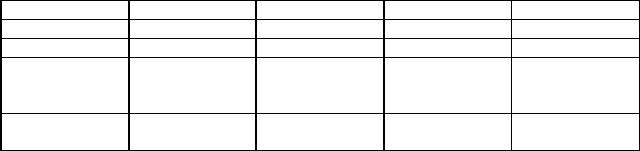
Установим взаимосвязь между знаками приращений координат и значениями дирекционных углов (табл. 7.2).
|
|
|
|
Таблица 7.2 |
Х |
+ |
- |
- |
+ |
Y |
+ |
+ |
- |
- |
Четверть |
I(СВ) |
II(ЮВ) |
III(ЮЗ) |
IV(СЗ) |
Изменения |
|
|
|
|
дирекционного |
0о – 90о |
90о – 180о |
180о – 270о |
270о – 360о(0о) |
угла |
α = r |
α = 180o - r |
α = 180o + r |
α = 360o - r |
Зависимость |
||||
α = f (r ) |
|
|
|
|
Для решения обратной геодезической задачи вычисляют приращения координат
X 2 |
= X 2 − X1 , |
(7.5) |
Y2 |
= Y2 − Y1 |
|
169
если задана задача определения дирекционного угла направления 1-2. Если же необходимо определить дирекционный угол направления 2-1, то приращения координат определяют по формулам
X1 |
= X1 − X 2 , |
(7.6) |
Y1 |
= Y1 − Y2 |
|
Далее вычисляют значение румба определяемого направления без учета знаков приращений координат
r1− 2(2−1) = arctg |
|
Y |
|
(7.7) |
|
|
|||
|
X |
|
||
|
|
|
|
и по знакам приращений координат, пользуясь таблицей 7.2, выбирают соответствующую формулу для вычисления дирекционного угла.
Дирекционный угол линии можно определить, таким образом, для любого ее направления, а дирекционный угол обратного направления, при необходимости, определяют по формуле обратного ориентирующего угла:
α ОБР = α ПР ± 1800 .
Горизонтальное проложение из прямоугольного треугольника 123 находят по формулам:
|
|
|
|
|
|
|
X 2 |
|
X1 |
|
Y2 |
|
Y1 |
|
|
d = |
X |
2 |
+ |
Y |
2 |
= |
= |
= |
= |
|
|||||
|
|
|
|
|
|
. |
(7.8) |
||||||||
|
|
cosα 12 |
cosα 21 |
sinα 12 |
sinα 21 |
||||||||||
Значения горизонтальных проложений, вычисленных по приведенным формулам, должны практически совпадать в пределах погрешностей округлений.
Пример 7.2. Обратная геодезическая задача.
Исходные данные: Х1 =7273,856 м; Y1 = 5241,656 м; Х2 = 9833,813 м; Y2 = 2165,041 м Найти дирекционный угол направления 1-2 и горизонтальное проложение линии 1-2.
Решение.
Х2 = 9833,813 – 7273,856 = + 2559,957 м. Y2 = 2165,041 – 5241,656 = - 3076,615 м.
(Четвертая четверть – СЗ) – см. табл. 7.2.
r1− 2 |
= arctg |
|
− 3076 |
,615 |
|
= arctg |
1,201823 = 50 014′14′′ . |
|
|
||||||||||||||||||
|
+ 2559 |
,957 |
|
|
|||||||||||||||||||||||
α 12 |
= |
360 |
0 |
00 |
′ |
00 |
′′ |
|
0 |
|
|
′ |
14 |
′′ |
= |
309 |
0 |
′ |
′′ |
. |
|
|
|
||||
|
|
|
− 50 14 |
|
|
45 46 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
= 4002 ,369 м . |
|
|
|
|||||||||||||||||
d12 |
= |
2559 ,957 2 |
+ 3076 ,615 2 |
|
|
|
|||||||||||||||||||||
d12 |
= |
+ 2559 ,957 |
= |
|
4002 ,369 м....... d12 |
|
= |
− 3076 ,615 |
= |
4002 ,365 м . |
|||||||||||||||||
|
cos 309 0 45′46′′ |
|
|
sin 309 0 45′46′′ |
|||||||||||||||||||||||
Незначительные расхождения в значениях горизонтального проложения обусловлены погрешностями вычислений при округлении приращений координат и дирекционного угла.
Обратный дирекционный угол α 21 = α 12 ± 1800 = 3090 45′46′′ − 1800 = 1290 45′46′′ .
Этот угол может быть получен и прямым расчетом через соответствующие приращения координат:
Х1= 7273,856– 9833,813 = - 2559,957 м. Y1 = 5241,656–2165,041= + 3076,615 м.
(Вторая четверть – ЮВ) – см. табл. 7.2.
r1− 2 |
= arctg |
|
+ 3076 |
,615 |
|
= |
arctg |
1,201823 |
= 50 014′14′′ . |
||||||||||||
− 2559 |
,957 |
||||||||||||||||||||
α 12 |
= 180 |
0 |
00 |
′ |
00 |
′′ |
|
0 |
|
|
′ |
14 |
′′ |
= 129 |
0 |
′ |
|
′′ |
. |
||
|
|
|
− 50 14 |
|
|
45 46 |
|
||||||||||||||
170
§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
Для последовательной передачи координат на точки теодолитных ходов необходимо последовательно решать прямые геодезические задачи для каждой из точек, а для этого необходимо знать значения дирекционных углов каждой из линий и их горизонтальные проложения. (Принцип определения горизонтальных проложений изложен в § 71).
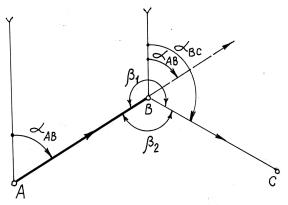
Рассмотрим схему передачи дирекционного угла с линии теодолитного хода на соседнюю с ней линию с использованием измеренного горизонтального угла β в точке поворота (рис. 7.4).
Рис. 7.4. Взаимосвязь дирекционных углов с горизонтальными углами, измеренными на местности
кого построения можно записать, что
Пусть нам известен дирекционный угол линии АВ (αАВ). В точке В поворота измерен горизонтальный угол β1, либо горизонтальный угол β2: (β1 + β2 = 360о). При указанном на схеме направлении хода угол β1 называют левым по ходу углом, а угол β2 –
правым по ходу углом.
Продолжим в точке В линию АВ, достроим в этой точке направление осевого меридиана, параллельного оси Х системы координат, и , в соответствии с определением дирекционного угла, отметим на схеме углы αАВ и αВС. Из полученного геометричес-
α ВС |
= α АВ ± 1800 |
+ β 1 |
|
α ВС |
= α АВ ± 1800 |
− β 2 . |
(7.9) |
Общая формула передачи дирекционного угла с линии на линию имеет |
|||
вид: |
= α n ± 1800 |
± β , |
(7.10) |
α n+ 1 |
|||
В этой формуле перед значением 180о может оставлять только знак «плюс». Перед значением горизонтального угла β : знак «плюс» - для левых по ходу углов, знак «минус» - для правых по ходу углов.
Ту же задачу удобно решать через дирекционные углы исходящих из точки В линий. Поскольку αАВ ± 180о = αВА, то из (7.9) и (7.10) получим, что
α ВС = α ВА ± β |
(7.11) |
Пример 7.3. Передача дирекционного угла через измеренный горизонтальный угол. 1. Исходные данные: αАВ = 115о36,7'; β (левый по ходу) = 253о14,5'.
Решение 1.
αВС = 115о36,7' + 180о + 253о14,5' = 548о51,2' – 360о = 188о51,2', поскольку значение дирекционного угла получилось больше 360о.
2. Исходные данные: αАВ = 5о02,7'; β (правый по ходу) = 274о16,8'.
171