

Глава 6 ОПТИКО-ЭЛЕКТРОННЫЕ ГЕОДЕЗИЧЕСКИЕ ПРИБОРЫ
Вопросы, изложенные в настоящей главе, по мнению авторов, являются весьма важными, поэтому данный раздел выделен в отдельную главу.
Здесь будут рассмотрены лишь некоторые особенности конструкции геодезических оптико-электронных приборов, области их применения, указаны технические характеристики нескольких типов прибо-ров. Более подробную информацию по указанным вопросам сейчас легко найти в Internet.
§56. Общие замечания
Внастоящее время геодезическая и маркшейдерская службы в строительстве промышленных зданий, инженерных сооружений, проектировании
ипроведении горных выработок, при выполнении топографических съемок и решении специальных инженерных задач со своими традиционными методами и инструментами не всегда соотвествуют уровню механизации строительства (при проектировании и геодезическом и маркшейдерском контроле). Здесь имеется в виду, что к традиционным геодезическим инструментам и методам пока мы относим оптические приборы различных конструкций, а также специфическую камеральную обработку полевых результатов измерений и графическую подготовку отчетной документации. К сожалению, наша отечественная промышленность (приборостроение) не обеспечивает в полной мере наши потребности в геодезических приборах нового поколения. Нельзя сказать, что в этом направлении не предпринималось никаких шагов. Вы-пускались и выпускаются оптико-электронные приборы (теодолиты, тахео-метры, светодальномеры, нивелиры, лазерные приборы и др.). Многие из них нашли широкое применение в геодезическом и маркшейдерском произ-водстве. Речь идет о массовом применении оптико-электронных приборов нового поколения, значительно облегчающих полевые измерения
ипракти-чески исключающих камеральные работы, в том числе и графические. Имеются приборы, которые позволяют после грубой первичной установки полностью автоматически измерять направления (углы) и расстояния.
Современный рынок геодезических приборов представлен в большинстве своем зарубежными образцами различного назначения и точности. При их сравнительно высокой стоимости не все геодезические и маркшейдерские службы на предприятиях имеют возможность приобрести такое оборудование.
Совершенствование геодезических приборов нового поколения идет такими высокими темпами, что через 10-15 лет, а то и менее, на смену современным оптико-электронным приборам придут новые приборы, с большими возможностями автоматизации полевых и камеральных работ. Так, как это
145
случилось за короткий срок в области электронно-вычислительной техники, телекоммуникаций и мн.др. Все эти превращения произошли на глазах нашего, старшего поколения. Не будет ошибкой сказать, что в вашем представлении, студентов и молодых специалистов, телевизоры были всегда, калькуляторы – тоже, и в космос человек полетел исторически давно, а не 4045 лет назад. Это естественно для человека. И о приборах нового поколения, о части из которых будет рассказано ниже, через 10-15 лет будут говорить как о давно прошедшем времени.
§ 57. Краткие сведения о лазерных источниках излучения
Лазер в переводе с английского означает «усиление света за счет вынужденного излучения».
В основу действия лазера положено усиление электромагнитных колебаний при помощи вынужденного излучения атомов и молекул какого-либо вещества. Вследствие волновых свойств электронов, их движение вокруг ядра происходит не по орбитам, а в некоторой области, в которой наиболее вероятным местом является орбита определенного радиуса. Движущийся вокруг ядра электрон обладает определенной энергией (квантовым числом), величина которой определяется дискретными значениями.
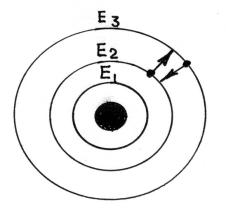
Обозначим условно энергетическое состояние электронов, находящихся на разных орбитах (рис. 6.1). Еi – потенциальная энергия электрона, находящегося на орбите i. Чем дальше орбита от ядра, тем больше потенциальная энергия электрона, населяющего эту орбиту. В основном, нормальном состоянии электроны распределяются по орбитам так, чтобы атом обладал наименьшей из всех возможных энергией Ео. Это значит, что ближние к ядру орбиты заполняются электронами полностью, до предела, а незаполненными могут быть только дальние орбиты. При воздействии на атом электромагнит-
ного излучения (нагревании, облучении светом, бомбардировании потоком элементарных частиц и т.п.) атом возбуждается, его электроны переходят на более высокие орбиты, и энергетическое состояние может быть записано в виде Ео' > Ео. Возбужденных состояний атома может быть несколько, и время пребывания атома в таком состоянии ограничено. Например, для водорода оно составляет около 10-8 с. При переходе атома
из состояния Еm в состояние Еn происходит выделение или поглощение энергии на частоте
ν = |
Еm − En |
, |
(6.1) |
|
h |
||||
|
|
|
146
где h – постоянная Планка. При Еm случае – поглощается. Каждому спектральная линия с длиной волны
› En энергия выделяется, а в обратном переходу соответствует определенная
λ = |
с |
, |
(6.2) |
ν |
где с – скорость света.
Если процесс перехода атомов вещества в другое энергетическое состояние является самопроизвольным (хаотичным), то спектр излучения получается широкополосным (как излучение Солнца).
В лазерах создается вынужденное (индуцированное) излучение под воздействием внешнего электромагнитного излучения. При этом атомы вещества излучают энергию согласованно, с одинаковой частотой (длиной волны). Такое излучение называют когерентным. Когерентное излучение характеризуется, кроме того, одинаковой фазой, поляризацией и направленностью.
Для того, чтобы получить вынужденное когерентное излучение необходимо выполнить следующие условия.
Условие 1. Условие резонанса, которое подразумевает совпадение частоты волны, вызывающей индуцированное излучение, с одной из частот энергетического спектра активного (рабочего) вещества.
Условие 2. Оно связано с переводом электронов с нижних заселенных уровней на более высокие «разрешенные» уровни. Для осуществления генерации излучения необходимо, чтобы верхний уровень был заселен больше, чем нижние. Это достигается за счет т.н. накачки, т.е. непрерывного подведения электромагнитной энергии извне.
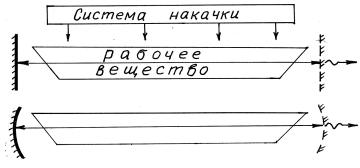
Для управления индуцированным излучением необходимо, чтобы часть излучаемой световой энергии все время оставалась внутри рабочего вещества, что позволит дополнительно вынуждать к индуцированному излучению все больше и больше атомов. Эта задача решается с помощью оптических резонаторов (рис. 6.2), представляющих собой плоские или сферические зеркала. Рабочее вещество помещается между зеркалами. Одно из зеркал полупрозрачное, что позволяет части энергии выходить из системы, а другую часть – возвращать внутрь для возбуждения других атомов. В резонаторе при его настройке возникает стоячее световое поле, если в промежутке L укладывается целое число волн рабочей частоты.
Излучение лазеров отличается от обычных источников света, например, лампы накаливания, высокой интенсивностью, монохроматичностью, направленностью и спектральной плотностью мощности. Степень монохроматичности определяется соотношением
147

М = |
λ |
, |
(6.3) |
|
λ О
где λ = 0,5(λ MAX − λ MIN ) − полуширина полосы излучения с центром λ О . Рабочие (активные) вещества могут быть газообразными и твердотель-
ными. В газовых лазерах используют смеси гелий-неон (He-Ne) в соотношении 5:1. В твердотельных лазерах в качестве рабочего вещества используют искусственные кристаллы рубина, изумруда, германия. В полупроводниковых лазерах – арсенид галлия.
Газовые He-Ne лазеры излучают на длине волны λ О = 0,6328 мкм. Их КПД составляет от 0,1 до 0,01%, выходная мощность от 0,1 до 0,001 Вт. Срок службы – 10000 часов непрерывной работы.
Рубиновый лазер излучает на длине волны λ О = 0,6943 мкм. Формируются световые импульсы с длительностью 10-3с. На основе рубиновых лазеров создано много светодальномеров, точность которых составляет 5-10 мм при дальности действия 10 км.
КПД полупроводниковых лазеров может быть весьма высоким, близким к 100%, но в современных конструкциях он пока достигает немногим более 50%. Выходная мощность полупроводниковых лазеров до 10 Вт при температуре рабочего вещества жидкого азота. При комнатной температуре мощность излучения сравнима с мощностью излучения газовых лазеров.
Большое значение имеет расходимость светового пучка (угловая расходимость). Она зависит от качественных характеристик резонатора, от количества колебаний в резонаторе. У газовых лазеров расходимость светового пучка достигает 5'-10', у твердотельных – до 15о – 20о. Расходимость определяет плотность энергии в световом пучке. При меньшей расходимости (при тех же выходных характеристиках) плотность энергии будет больше.
§ 58. Электромагнитные дальномеры
Электромагнитные дальномеры – это устройства для измерения расстояний по времени распространения электромагнитных волн между конечными точками линии. При этом предполагается, что скорость распространения электромагнитных колебаний в момент измерений известна и постоянна.
Для определения скорости распространения электромагнитных волн в атмосфере используют формулу
V = |
c |
= |
|
c |
|
, |
(6.4) |
n |
|
|
|
||||
μ ε |
где n – показатель преломления атмосферы на пути электромагнитного излучения, который зависит от магнитной проницаемости μ и диэлектрической постоянной ε . В свою очередь, значения μ и ε зависят от плотности возду-ха и частоты использованных колебаний. При качественном учете метеоусло-вий остаточная погрешность в определении расстояния составляет 1:500000.
148
При измерении коротких расстояний (до 1-2 км) точность измерений определяется, в основном, погрешностями измерения времени нахождения светового пучка в пути, при расстояниях в десятки километров – погрешностями в определении показателя преломления воздуха. Скорость распространения электромагнитных колебаний в вакууме известна с высокой точностью (с = 299792458 м/с). Точность измерения времени в настоящее время составляет примерно 10-10с, что соответствует расстоянию в 1-2 см. Такие дальномеры относят к точным.
В зависимости от вида используемых электромагнитных колебаний дальномеры делят на свето- и радиодальномеры. В зависимости от характера излучения – на импульсные и фазовые.
Все электромагнитные дальномеры состоят из двух основных частей – приемопередатчика и отражателя, устанавливаемых в конечных точках линии.
|
При импульсном спосо- |
|
|
бе измерения расстояний |
|
|
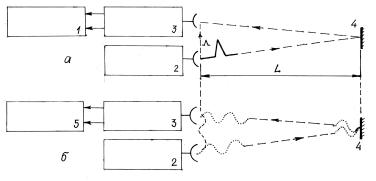
(рис. 6.3 а) передатчиком 2 |
|
|
генерируются импульсы, ко- |
|
|
торые направляются в сторо- |
|
|
ну отражателя 4. От отража- |
|
|
теля импульсы попадают на |
|
|
приемное устройство 3, ко- |
|
Рис. 6.3. Способы измерения расстояний: |
торое отправляет эту инфор- |
|
мацию в индикатор времени |
||
импульсный (а); фазовый (б) |
||
|
1, где регистрируется время |
начала посылки импульса и момент его прихода от отражателя. Таким образом, регистрируется время τ нахождения импульса в пути на двойном расстоянии. Импульсы излучаются через равные промежутки времени с высокой частотой.
Импульсные дальномеры имеют сравнительно невысокую точность (от 1,5 до 150 м), но обладают большой оперативностью, что целесообразно использовать для измерения расстояний до движущихся объектов. Наиболее точные импульсные дальномеры применяют в аэрофотосъемке для определения высоты фотографирования (точность измерений составляет 1,2 м в равнинной и до 2 м в горной местности).
Принципиальная схема фазового дальномера приведена на рис. 6.3 б. Передатчик 2 непрерывно излучает и направляет в сторону отражателя
электромагнитные колебания с частотой f. Часть сигнала ответвляется на фазометр 5 (опорный сигнал). После отражения на приемник 2, а затем – на фазометр, поступает отраженный сигнал:
ϕ ОП |
= 2π ft + ψ |
, |
(6.5) |
ϕ ОТР |
= 2π f (t − τ ) + ψ |
||
где ψ - начальная фаза колебаний при t = 0. |
|
|
|
Разность фаз этих колебаний |
, |
(6.6) |
|
ϕ = ϕ ОП − ϕ ОТР = 2π fτ |
|||
149