

положение, то отсчет А не будет содержать погрешности. При наклоне прибора на некоторый угол горизонтальный луч смещается вверх или вниз относительно первоначального положения. Для того, чтобы отсчет по средней нити сетки не изменился, необходимо изменить положение сетки из положения Со в положение С1. Либо, с другой стороны, изменить направление горизонтального луча так, чтобы он снова попал на среднюю нить сетки. В первом случае компенсация осуществляется в механических компенсаторах, во втором – в оптико-механических компенсаторах.
Одна из схем компенсации поясняется на рис. 5.5 (правый рисунок). Эта схема реализована в нивелире Н3К-1. При наклоне прибора, например, против часовой стрелки на угол α центр сетки нитей сместится из положения С в положение С'. Зеркало 2 компенсатора подвешено на нитях 1 к корпусу прибора. При наклоне прибора это зеркало также наклонится относительно корпуса на угол 0,5α, в связи с чем луч АВ при отражении от зеркала 2 изменит свое направление на угол (90о±α), т.е. его направление компенсируется – при отражении от зеркала 4 он попадет в то же место сетки нитей.
Существуют различные конструкции компенсаторов, в которых чувствительным элементом являются объективы (либо их часть), призмы, включенные в ход оптических лучей, сетки нитей и др. Чаще всего используют компенсаторы маятникового типа, в которых оптический элемент под действием силы тяжести занимает всегда одно и то же положение при возможных отклонениях осей прибора из-за внешних воздей-ствий, либо из-за погрешностей установочного уровня. Чувствительный оптический элемент компенсатора в маятниковых системах подвешивается на специальных нитях, либо в осевых системах качения.
§ 43. Устройство теодолита
Основные принципы построения любых теодолитов вот уже на протяжении 250 лет остаются неизменными. В любых конструкциях обеспечивается сохранение схемы, приведенной на рис. 5.2. Все теодолиты имеют подставки с тремя подъемными винтами, колонки, на которых размещены все остальные узлы: горизонтальный и вертикальный круги с их отсчетными устройствами, зрительные трубы, зажимные и наводящие устройства, уровни, системы подсветки шкал и др. Конструктивно перечисленные части могут отличаться в теодолитах различных типов, но их назначение – сохраняется. В связи с этим в качестве основного примера рассмотрим технический теодолит 2Т30П (рис. 5.6), представленный в разрезе в правой части рисунка. В левой части рисунка приведены виды оптических теодолитов отечественного производства (сверху вниз): 2Т30, Т30М, 2Т5К.
Теодолит 2Т30 – технический. На колонке теодолита размещены: зрительная труба 1 обратного изображения с визирами 9 и накладным уровнем 10; цилиндрический уровень 11, служащий для горизонтирования прибора; наводящий 3 и зажимной 2 винты зрительной трубы; наводящий 5 и зажимной 4 винты алидады горизонтального круга; наводящий 6 и зажимной 7
109
винты горизонтального круга (расположены конструктивно в подставке); кремальера 12 (маховичок, при помощи которого в зрительной трубе перемещается фокусирующая линза ). Подставка теодолита снабжена подъемными винтами 8, с помощью которых теодолит центрируют и приводят в рабочее положение.
Теодолит Т30М – технический. Выпускается в рудничном исполнении. Конструкция вертикальной оси вращения теодолита, наличие реверсивного уровня 11 и съемной подставки 1 позволяют выполнять работу с теодолитом, подвешенном в перевернутом положении в шахте. Теодолит имеет зрительную трубу 5 с визирами 8 и кремальерой 7, зажимной 9 и наводящий 10 винты зрительной трубы, зажимной 2 и наводящий 3 винты горизонтального круга, отсчетный микроскоп 6, 12 и 13 – курковый зажим, предназначенный для скрепления горизонтального круга и его алидады. При значительных углах наклона визирной оси используется зенитная (призменная) насадка 14, а также коленчатый окуляр 15. Для подсветки шкал сбоку колонки имеется специальное осветительное устройство 4.
110
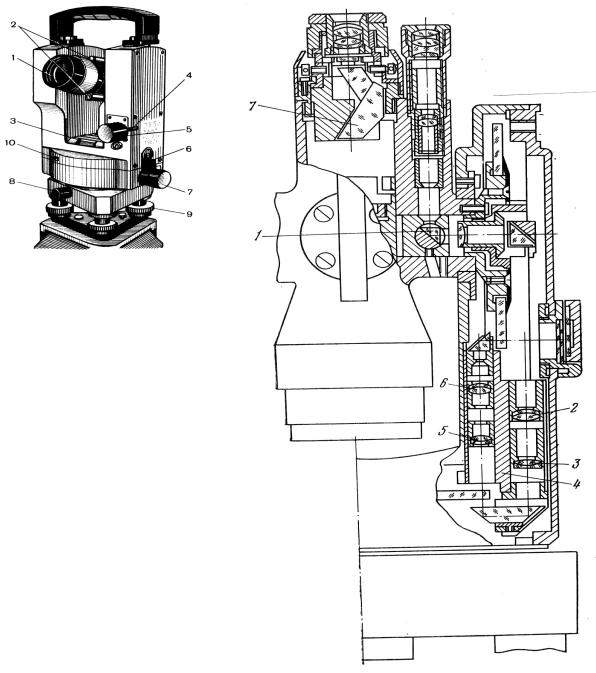
Рис. 5.6. Устройство теодолита 2Т30П.
Теодолит 2Т5К относится к точным приборам. Вертикальный круг теодолита снабжен компенсатором, который позволяет удерживать в отвесном положении отсчетный индекс алидады вертикального круга. Зрительная труба 1 теодолита снабжена визирами 2. Узлы 4-5 и 6-7 представляют собой зажимное и наводящее устройства соответственно зрительной трубы и горизонтального круга. Установка теодолита в рабочее положение выполняется с помощью подъемных винтов 9 подставки и цилиндрического уровня 3. В подставке имеется зажимной винт 8, с помощью которого фиксируется в ней колонка теодолита. В корпусе колонки имеется окно искателя отсчетов горизонтального круга. Теодолит снабжен оптическим центриром (на рисунке не показан).
111
Конструкции теодолитов Т30 и 2Т30П (правая часть рисунка) практически идентичны. Зрительная труба теодолита 2Т30П прямого изображения, для чего в нее введен блок 7 оборачивающих призм, расположенный перед сеткой нитей. Изображение штрихов горизонтального и вертикального кругов соответственно объективами 2-3 и 5-6, конструктивно закрепленными на кронштейне 4, передаются через призму 1 в окулярную часть отсчетного ми-
кроскопа. |
|
|
|
|
|
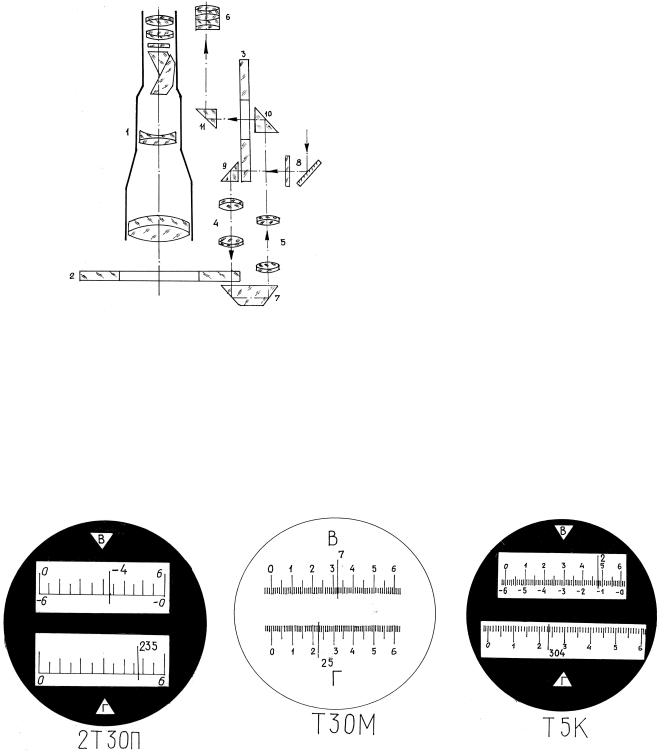
Ход лучей в теодолите 2Т30П поясняется на рис. 5.7. |
|
|
|
||
|
Теодолит 2Т30П имеет однока- |
||||
|
нальную оптическую систему, от- |
||||
|
счеты в которой производятся по |
||||
|
одной |
стороне |
горизонтального |
и |
|
|
вертикального кругов. Световой по- |
||||
|
ток от системы подсветки 8 (зер- |
||||
|
кала) попадает на шкалу верти- |
||||
|
кального круга 3, затем призмой 9 |
||||
|
направляется в окуляр 4 и далее на |
||||
|
шкалу |
горизонтального |
круга |
2. |
|
|
Совмещенное |
изображение шкал |
|||
|
призмой 7 через объектив 5 и систе- |
||||
|
му прямоугольных призм 10 и 11 |
||||
|
передается в окулярную часть си- |
||||
|
стемы отсчетного микроскопа через |
||||
Рис. 5.7. Оптическая схема теодолита |
внутреннюю механическую полую |
||||
2Т30П |
часть |
осевой системы |
зрительной |
||
трубы 1.
Поле зрения отсчетной системы теодолитов сконструировано одинаково (рис. 5.8): в верхней части – шкала вертикального круга (индекс В), в нижней
– горизонтального (индекс Г).
Принцип получения отсчета простой. Шкалы горизонтального и вертикального кругов оцифрованы через 1о. Этот интервал разбит на 12 частей (одно деление соответствует 5'), либо разбивка выполнена через 1'.
Рис. 5.8. Поле зрения отсчетной системы теодолитов 2Т30П, Т30М, Т5К.
112