

- •Предисловие
- •Глава 1. Вводная часть
- •§ 1. Предмет и задачи геодезии
- •§ 2. Краткие исторические сведения
- •§ 3. Единицы измерений, применяемые в геодезии
- •§ 4. Фигура и размеры Земли
- •§ 5. Содержание курса и рекомендации по его изучению
- •Глава 2. Топографические карты и планы
- •§ 6. Влияние кривизны Земли на измеренные расстояния
- •§ 7. Краткие сведения о картографических проекциях
- •§ 8. Общие сведения о топографических картах и планах
- •§ 9. Система географических координат
- •§ 10. Равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера
- •§ 11. Разграфка и номенклатура топографических карт и планов
- •§ 12. Зональная система плоских прямоугольных координат Гаусса
- •§ 13. Перевычисление координат из зоны в зону
- •§ 14. Система высот
- •§ 15. Условные знаки топографических карт и планов
- •§ 16. Изображение рельефа на топографических картах и планах
- •§ 17. Ориентирование
- •§ 18. Решение некоторых задач с использованием топографической карты
- •18.1. Измерение расстояний
- •18.2. Определение географических и прямоугольных координат
- •18.3. Ориентирование линий
- •18.4. Ориентирование карты на местности
- •18.5. Определение высот точек
- •18.6. Построение профиля
- •18.7. Построение линии заданного уклона
- •18.9. Определение площадей на топографических картах и планах
- •§ 19. Виды измерений
- •§ 20. Классификация погрешностей измерений
- •§ 21. Свойства случайных погрешностей
- •§ 22. Среднее арифметическое
- •§ 23. Средняя квадратическая погрешность
- •§ 24. Средние квадратические погрешности функций измеренных величин
- •§ 25. Обработка ряда равноточных измерений одной величины
- •§ 26. Об учете систематических погрешностей в измерениях
- •§ 27. Средняя квадратическая погрешность двойных равноточных однородных измерений
- •§ 28. Понятие о весе результата измерения
- •§ 29. Средняя квадратическая погрешность единицы веса и арифметической середины
- •§ 30. Обработка ряда неравноточных измерений одной величины
- •Глава 4. Государственные геодезические сети
- •§ 31. Назначение Государственных геодезических сетей
- •§ 32. Классы геодезических сетей
- •§ 33. Методы построения Государственных геодезических сетей
- •§ 34. Закрепление пунктов геодезических сетей
- •§ 35. Оценка точности построения опорных геодезических сетей
- •§ 36. Оценка точности построения сетей триангуляции
- •§ 37. Оценка точности построения звена полигонометрии
- •§ 38. Оценка точности построения сетей трилатерации
- •Глава 5. Геодезические приборы
- •§ 39. Классификация геодезических приборов
- •§ 40. Теодолиты
- •§ 41. Зрительные трубы
- •§ 42. Уровни и компенсаторы наклона
- •§ 43. Устройство теодолита
- •§ 44. Установка теодолита в рабочее положение
- •§ 45. Измерение горизонтальных углов и углов наклона
- •45.1. Способ приемов
- •45.2. Способ повторений
- •45.3. Способ круговых приемов
- •45.4. Измерение углов наклона
- •§ 46. Поверки теодолитов
- •§ 47. Нивелиры
- •§ 48. Устройство нивелира
- •§ 49. Нивелирные рейки
- •§ 50. Установка нивелира в рабочее положение
- •§ 51. Измерение превышений
- •§ 52. Поверки нивелиров
- •§ 53. Приборы для линейных измерений
- •§ 54. Гироскопические приборы
- •§ 55. Приборы для поиска подземных коммуникаций
- •Глава 6. Оптико-электронные геодезические приборы
- •§ 56. Общие замечания
- •§ 57. Краткие сведения о лазерных источниках излучения
- •§ 58. Электромагнитные дальномеры
- •§ 59. Светодальномеры
- •§ 60. Интерферометры
- •§ 61. Угломерные приборы
- •§ 62. Электронные тахеометры
- •§ 63. Электронные нивелиры
- •§ 64. Лазерные приборы
- •Глава 7. Построение съемочного обоснования
- •§ 65. Назначение и виды теодолитных ходов
- •§ 66. Прямая и обратная геодезические задачи на плоскости
- •§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
- •§ 68. Привязка теодолитных ходов
- •68.1. Способ примыкания
- •68.2. Прямая угловая засечка
- •68.3. Линейная засечка
- •68.4. Обратная угловая засечка
- •68.5. Комбинированные засечки
- •68.6. Задача П.А.Ганзена
- •§ 69. Особые системы теодолитных ходов
- •§ 70. Снесение координат с вершины знака на землю
- •§ 71. Определение элементов приведения и редукции
- •§ 72. Привязка теодолитных ходов к стенным геодезическим знакам
- •§ 73. Спутниковые методы определения координат
- •§ 74. Организация полевых работ при построении съемочного обоснования
- •74.1. Рекогносцировка и закрепление точек съемочного обоснования
- •74.2. Подготовка абрисов горизонтальной съемки
- •74.3. Поверки теодолита и нивелира
- •74.4. Компарирование мерных приборов
- •74.5. Измерение длин линий
- •74.6. Измерение горизонтальных углов и углов наклона
- •§ 75. Вычисления в разомкнутом теодолитном ходе
- •75.1. Предварительные вычисления
- •75.2. Обработка результатов угловых измерений
- •75.3. Вычисление приращений координат и оценка точности хода
- •75.4. Рекомендации к поиску вероятных погрешностей в измерениях и вычислениях при обработке ведомости координат
- •75.5. Уравнивание приращений координат и вычисление координат точек хода
- •75.6. Обработка ведомости высот
- •§ 76. Вычисления в замкнутом теодолитном ходе
- •76.1. Оценка точности угловых измерений и вычисление дирекционных углов
- •76.2. Вычисление приращений координат и оценка точности хода
- •76.3. Уравнивание приращений координат и вычисление координат точек хода
- •76.4. Обработка ведомости высот
- •§ 77. Обработка диагонального хода
- •Глава 8. Топографические съемки
- •§ 78. Назначение и виды топографических съемок
- •§ 79. Понятие о цифровой модели местности
- •§ 80. Теодолитная съемка
- •§ 81. Тахеометрическая съемка
- •§ 82. Составление плана местности по результатам топографической съемки
- •82.2. Нанесение на план точек съемочного обоснования
- •82.3. Нанесение на план результатов тахеометрической съемки
- •82.4. Рисовка рельефа и ситуации
- •82.5. Построение на плане ситуации по результатам теодолитной съемки
- •Глава 9. Нивелирные работы
- •§ 83. Способы и методы нивелирования
- •§ 84. Способы геометрического нивелирования
- •§ 85. Основные источники погрешностей геометрического нивелирования
- •§ 86. Техническое нивелирование
- •§ 87. Трассирование
- •§ 88. Расчет и разбивка главных точек кривых на трассе
- •§ 89. Нивелирование поперечных профилей
- •§ 90. Обработка результатов нивелирования трассы
- •§ 91. Построение профиля трассы
- •§ 92. Построение проектной линии
- •§ 93. Построение поперечного профиля и проектного полотна дороги
- •§ 94. Нивелирование площадей
- •Глава 10. Геодезические разбивочные работы
- •§ 95. Назначение и организация разбивочных работ
- •§ 96. Построение на местности проектного горизонтального угла
- •§ 97. Построение на местности проектного расстояния
- •§ 99. Способы разбивочных работ
- •§ 100. Расчет разбивочных элементов
- •§ 101. Разбивочные работы при трассировании
- •§ 102. Разбивка фундаментов инженерных сооружений
- •§ 103. Оценка точности разбивочных работ
- •Глава 11. Геодезические работы в строительстве
- •§ 104. Общие положения
- •§ 105. Краткие сведения об объектах строительства
- •§ 106. Геодезические работы при строительстве промышленных сооружений
- •§ 107. Геодезические работы при строительстве гражданских зданий
- •§ 108. Геодезические работы при строительстве дорог и мостовых сооружений
- •§ 109. Геодезические работы при планировании и застройке населенных пунктов
- •§ 110. Геодезические работы при строительстве подземных коммуникаций
- •§ 111. Геодезические работы при строительстве гидротехнических сооружений
- •Глава 12. Геодезические работы в подземном строительстве
- •§ 115. Горизонтальная соединительная съемка
- •115.2. Горизонтальная соединительная съемка через один шахтный ствол
- •§ 116. Вертикальная соединительная съемка
- •§ 117. Подземная горизонтальная съемка
- •§ 118. Подземная вертикальная съемка
- •§ 119. Геодезические разбивочные работы в подземном строительстве
- •§ 120. Задачи и содержание топографо-геодезических работ
- •§ 121. Точность геодезических работ
- •§ 122. Создание топографических карт и планов
- •§ 123. Разбивка геодезических сеток и профильных линий
- •§ 124. Разбивочные работы при проведении геологической разведки
- •§ 126. Виды деформаций инженерных сооружений
- •§ 127. Задачи наблюдений и организация работ
- •§ 128. Геодезические знаки и их конструкции
- •§ 129. Размещение геодезических знаков на инженерных сооружениях
- •§ 130. Точность измерения деформаций
- •§ 131. Периодичность наблюдений
- •§ 132. Наблюдения за вертикальными перемещениями
- •§ 133. Наблюдения за горизонтальными смещениями
- •§ 134. Наблюдения за кренами
- •§ 135. Наблюдения за деформациями земной поверхности
- •§ 136. Разработка методики наблюдений
- •§ 137. Обработка и анализ результатов наблюдений
- •Глава 15. Особенности точных и высокоточных измерений
- •§ 138. Основные группы погрешностей измерений
- •§ 139. Учет влияния рефракции атмосферы
- •§ 140. Высокоточное и точное геометрическое нивелирование
- •§ 141. Нивелирование I класса
- •§ 142. Нивелирование II класса
- •§ 143. Нивелирование III и IV классов
- •§ 144. Особенности точного и высокоточного нивелирования при наблюдениях за деформациями
- •§ 145. Высокоточные и точные угловые измерения
- •§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
- •Глава 16. Уравнивание геодезических построений
- •§ 147. Основные задачи уравнительных вычислений
- •§ 148. Метод наименьших квадратов
- •§ 149. Классификация основных способов уравнивания
- •§ 150. Основные геометрические условия, возникающие в построениях
- •150.1. Условие фигуры
- •150.2. Условие горизонта
- •150.3. Условие суммы углов
- •150.4. Условие дирекционных углов
- •150.5. Условие сторон
- •150.6. Условие полюса
- •150.7. Условие координат
- •§ 151. Методы решения систем линейных нормальных уравнений
- •151.1. Способ последовательной подстановки
- •151.2. Способ матричных преобразований
- •151.3. Решение систем линейных уравнений по алгоритму Гаусса
- •151.4. Способ краковянов
- •§ 152. Коррелатный способ уравнивания
- •§ 153. Примеры коррелатного способа уравнивания
- •153.1. Уравнивание углов в полигоне
- •153.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •153.3. Уравнивание полигонометрического хода
- •153.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •153.5. Уравнивание триангуляции
- •153.6. Уравнивание триангуляции по условию координат
- •§ 154. Параметрический способ уравнивания
- •§ 155. Примеры параметрического способа уравнивания
- •155.1. Уравнивание углов в полигоне
- •155.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •155.3. Уравнивание полигонометрического хода
- •155.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •155.5. Уравнивание направлений в триангуляции
- •§ 156. Способ раздельного уравнивания
- •156.1. Уравнивание полигонометрического хода
- •156.2. Система полигонометрических ходов с одной узловой точкой
- •156.3. Система нивелирных ходов с одной узловой точкой
- •§ 157. Способ эквивалентной замены
- •§ 158. Способ полигонов В.В.Попова
- •§ 159. Способ последовательных приближений
- •§ 160. Оценка точности уравненных элементов и их функций
- •160.1. Общие положения
- •160.2. Оценка точности при уравнивании коррелатным способом
- •160.3. Оценка точности при уравнивании параметрическим способом
- •Предметный указатель
- •Список литературы
- •Оглавление
Величины поправок по ходам (1) и (5) получаются как разность между уравненным значением высоты узловой точки А и ее высотами, полученными по соответствующим ходам:
ν (1) = H A0 − H A(1) ν (5) = H A0 − H A(5)
= 80,5048 − 80,5120 = − 0,0072 м = − 7,2мм = 80,5048 − 80,4990 = + 0,0058 м = + 5,8мм
Аналогично для ходов (2) и (7) через узловую точку С:
ν (2) |
= |
HС0 − HС (2) |
= 80,0537 − 80,0500 = + 0,0037 м = + 3,7мм |
|
ν (7) |
= |
HС0 − HС (7) |
= 80,0537 − 80,0540 = − 0,0003 м = − 0,3мм |
|
12. Выполнить контроль уравнивания по формуле |
|
|||
|
|
|
[ν i ] j = −W j |
(16.221) |
по каждому из замкнутых полигонов и разомкнутому ходу. Для этого занесем на схему нивелирных ходов значения полученных поправок. Знак поправки на схеме устанавливают в соответствии с направлением движения.
[ν i ] [ν i ] [ν i ] [ν i ]
(1)
(2)
(3)
(4)
=(− 7,2) + (− 0,8) + (− 3,3) + (− 3,7) = − 15 мм;
=(− 5,8) + (− 3,0) + (+ 0,8) = − 8мм;
= (− 0,3) + (3,0) + (+ 3,3) |
= + 6мм; |
= (− 7,2) + (− 5,8) = − 13 |
мм; |
§158. Способ полигонов В.В.Попова
Вэтом примере используем схему нивелирных ходов, рассмотренную в
§157.
1. В крупном масштабе привести указанную схему нивелирных ходов (рис. 16.18), на которой следует отметить и пронумеровать независимые
полигоны. Число полигонов должно быть равно |
|
r = N + q − 1 , |
(16.222 ) |
где N – число замкнутых неперекрывающихся полигонов (N = 3); q – число исходных пунктов (q = 2). Т.е. r = 4.
2. На схеме указать длины ходов, направление обхода полигонов (для всех: либо по часовой стрелке, либо против часовой стрелки). Внутри полигонов (под номером полигона) построить таблички невязок, в которые будут заноситься величины невязок в приближениях. С внешней стороны каждого хода разместить таблички поправок в измеренные превышения данного хода (для смежных полигонов вычерчиваются для одного и того же хода две таблички поправок – с двух сторон хода).
490
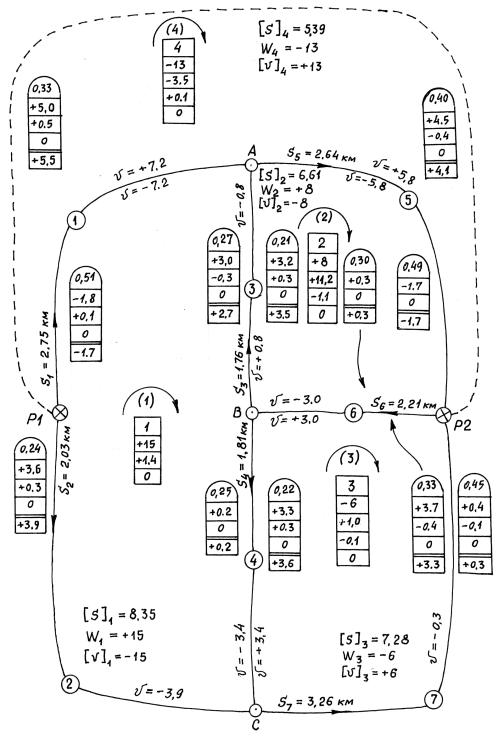
Рис. 16.18. Уравнивание способом полигонов (В.В.Попова)
3. Распределить невязки W в ходах пропорционально длинам ходов по формуле
vi = |
W( j) |
si |
(16.223 ) |
|
|||
|
å s( j) |
|
|
Веса превышений рi = si  å s( j )
å s( j )
записываются в табличке поправок в верхней полукруглой графе (с округлеением до 0,01). Сумма весов для полигона должна быть равна 1.
491
Уравнивание целесообразно начинать с полигона, имеющего большую невязку. В этом случае количество приближений сокращается. В примере уравнивание следует начинать с полигона (1).
Полигон (1). Невязка + 15 мм.
v1 |
= + 15 ×0,33 = + 5,0мм ; |
v2 |
= |
+ 15 ×0,24 = |
+ 3,6мм ; |
v3 |
= + 15 ×0,21 = + 3,2мм ; |
v4 |
= |
+ 15 ×0,22 = |
+ 3,3мм |
Полигон (2). В этот полигон входит поправка хода (3), равная +3,2 мм. Поэтому перед распределением поправкок значение невязки полигона (2) следует исправить: +8,0 +3,2 = +11,2 мм.
v3 = + 11,2 ×0,27 = + 3,0мм ; |
v5 = + 11,2 ×0,40 = + 4,5мм ; v6 = + 11,2 ×0,33 = + 3,7мм . |
Полигон (3). |
|
Невязка в полигоне исправляется на величины уже известных поправок: |
|
-6,0 + 3,3 + 3,7 = +1,0 мм. |
|
v4 = + 1,0 ×0,25 = + 0,2мм ;v6 |
= + 1,0 ×0,30 = + 0,3мм ;v7 = + 1,0 ×0,45 = + 0,4мм . |
Полигон (4).
Невязка в полигоне исправляется на величины уже известных поправок:
+13,0 + 5,0 + 4,5 = + 22,5 мм.
v1 = + 22,5 ×0,51 = + 11,5мм ;v5 = + 22,5 ×0,49 = + 11,0мм .
4. Далее вся процедура уравнивания повторяется, начиная последовательность действияй с полигона (1).
Следует иметь в виду, что в последующем во всех полигонах невязка будет образована суммой поправок, находящихся в табличках внутри полигона.
Полигон (1). Невязка: - 1,8 + 3,0 + 0,2 = +1,4 мм.
v1 = + 0,5 мм ; v1 = + 0,5 мм ; v1 = + 0,5 мм ; v1 = + 0,5 мм.
Полигон (2). Невязка: +0,3 – 1,7 + 0,3 = - 1,1 мм.
v3 = - 0,3 мм ; v5 = - 0,4 мм ; v6 = - 0,4 мм .
Полигон (3). Невязка: + 0,3 – 0,4 = - 0,1мм.
v4 = 0,0 мм (округлена) ; v6 = 0,0 мм (округлена) ; v7 = - 0,1 мм .
Полигон (4). Невязка: + 0,5 – 0,4 = + 0,1 мм. v5 = 0,0 мм ; v1 = + 0,1мм .
5.Под двойной чертой во всех табличках поправок получить их алгебраическую сумму.
6.Вычислить значения поправок по ходам.
Правило вычисления поправок следующее.
Для хода, принадлежащего двум смежным полигонам, поправка равна алгебраической сумме чисел внутренней и внешней табличек. При этом сумма поправок внешней таблички берется с обратным знаком:
-ход (1), полигон (1): - 1,7 + (-5,5) = - 7,2 мм;
-ход (1), полгон (4): + 5,5 + 1,7 = + 7,2 мм;
-ход (5), полигон (2): - 1,7 – 4,1 = - 5,8 мм;
-ход (5), полигон (4): + 4,1 + 1,7 = + 5,8 мм;
-ход (6), полигон (2): - 3,3 + 0,0 = - 3,3 мм;
-ход (6), полигон (3): + 3,3 + 0,0 = + 3,3 мм;
-ход (4), полигон (1): + 0,2 + (-3,6) = - 3,4 мм;
-ход (4), полигон (4): + 3,6 + (-0,2) = +3,4 мм.
492
Для свободного хода поправка соответствует вычисленной под двойной чертой таблички: ход (2): - 3,9 мм; ход (7): - 0,3 мм.
В данном случае окончательные значения поправок можно округлить до 1 мм. В особо ответственных случаях, например, в нивелирных сетях при измерениях деформаций сооружений, часто поправки округляют до 0,1 мм.
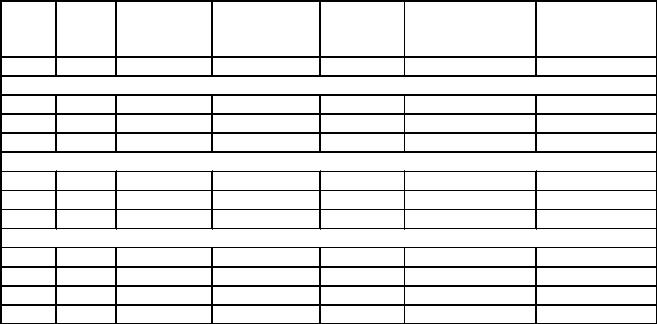
7. Вычислить уравненные превышения и высоты узловых точек (табл.
16.65).
Если направление хода при вычислении высот совпадает с направлением хода по полигону, которому принадлежит этот ход, то поправка в измеренное превышение вводится с тем же знаком, с которым она получена из уравнивания. Если не совпадает, то знак поправки берется обратным.
Как следует из таблицы 16.65 , значения уравненных высот отличаются не более, чем на 1 мм, что связано с округлением поправок.
|
|
|
|
|
|
|
|
|
|
Таблица 16.65 |
№ |
№№ |
Высота |
Измеренное |
|
Поправка, |
Уравненное |
Уравненная |
|||
хода |
точек |
исходного |
превышение, |
|
|
мм |
|
превышение, мм |
высота, м |
|
|
|
репера, м |
мм |
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
|
|
|
5 |
|
6 |
7 |
|
|
|
Т |
о |
ч |
к |
а |
А |
|
|
1 |
Р1 |
76,248 |
+4264 |
|
|
|
-7 |
|
+4258 |
80,506 |
5 |
Р2 |
83,786 |
-3287 |
|
|
|
+6 |
|
-3281 |
80,505 |
|
|
|
Т |
о |
ч |
к |
а |
В |
|
80,506 |
|
|
|
|
|
||||||
3 |
А |
80,506 |
+1205 |
|
|
|
-1 |
|
+1204 |
81,710 |
6 |
Р2 |
83,786 |
-2074 |
|
|
|
-3 |
|
-2077 |
81,709 |
|
|
|
Т |
о |
ч |
к |
а |
С |
|
81,710 |
|
|
|
|
|
||||||
2 |
Р1 |
76,248 |
+3802 |
|
|
|
+4 |
|
+3806 |
80,054 |
7 |
Р2 |
83,786 |
-3732 |
|
|
|
0 |
|
-3732 |
80,054 |
4 |
В |
81,709 |
-1652 |
|
|
|
-3 |
|
-1655 |
80,054 |
|
|
|
|
|
|
|
|
|
|
80,054 |
§ 159. Способ последовательных приближений
Для иилюстрации способа последовательных приближений рассмотрим схему нивелирных ходов примера § 157 (способ эквивалентной замены).
1.В ведомость уравнивания (табл. 16.66 , столбцы 1-6) выписать исходные данные со схемы нивелирной сети (рис. 16.17) для каждой узловой точки (А, В, С), а также из табл. 16.64 – значения весов превышений.
2.1-е приближение. Точка А.
Вычислить высоту узловой точки В по результатам измерений. По формуле (3.39) получить среднее весовое значение высоты точки А по ходам (1)
и (5): НА(1) = 80,5054 м.
493
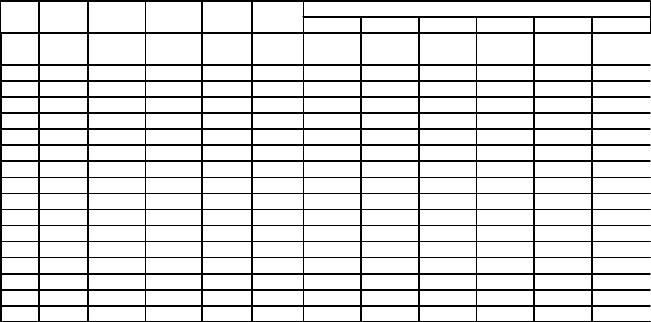
Таблица 16.66
Ход |
Точки |
Исх. |
Превы- |
Длина |
Вес |
|
Значения высот в приближениях, м |
|
|||
|
|
высота, |
шение, |
хода, |
|
|
|
|
|
|
|
|
|
м |
м |
км |
|
1-е |
2-е |
3-е |
4-е |
5-е |
6-е |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
|
|
|
|
Точка |
А |
|
|
|
|
1 |
Р1 |
76,248 |
+4264 |
2,75 |
0,727 |
80,5120 |
80,5120 |
80,5120 |
80,5120 |
80,5120 |
80,5120 |
3 |
В |
|
-1205 |
1,76 |
1,136 |
|
80,5061 |
80,5046 |
80,5042 |
80,5041 |
80,5040 |
5 |
Р2 |
83,786 |
-3287 |
2,64 |
0,758 |
80,4990 |
80,4990 |
80,4990 |
80,4990 |
80,4990 |
80,4990 |
|
|
|
|
|
2,6212 |
80,5054 |
80,5057 |
80,5050 |
80,5049 |
80,5048 |
80,5048 |
|
|
|
|
|
|
Точка |
В |
|
|
|
|
4 |
С |
|
+1652 |
1,81 |
1,105 |
|
81,7066 |
81,7060 |
81,7059 |
81,7058 |
81,7058 |
3 |
А |
|
+1205 |
1,76 |
1,136 |
81,7104 |
81,7107 |
81,7100 |
81,7099 |
81,7098 |
81,7098 |
6 |
Р2 |
83,786 |
-2074 |
2,21 |
0,905 |
81,7120 |
81,7120 |
81,7120 |
81,7120 |
81,7120 |
81,7120 |
|
|
|
|
|
3,146 |
81,7111 |
81,7096 |
81,7092 |
81,7091 |
81,7090 |
81,7090 |
|
|
|
|
|
|
Точка |
С |
|
|
|
|
2 |
Р1 |
76,248 |
+3802 |
2,03 |
0,985 |
80,0500 |
80,0500 |
80,0500 |
80,0500 |
80,0500 |
80,0500 |
4 |
В |
|
-1652 |
1,81 |
1,105 |
80,0591 |
80,0576 |
80,0572 |
80,0571 |
80,0570 |
80,0570 |
7 |
Р2 |
83,786 |
-3732 |
3,26 |
0,614 |
80,0540 |
80,0540 |
80,0540 |
80,0540 |
80,0540 |
80,0540 |
|
|
|
|
|
2,704 |
80,0546 |
80,0540 |
80,0539 |
80,0538 |
80,0538 |
80,0538 |
1-е приближение. Точка В.
Вычислить среднее весовое значение высоты точки В по ходам (6) и (3), используя в ходе (3) среднее весовое значение высоты точки А:НВ(1)=81,7111 м.
1-е приближение. Точка С.
Вычислить среднее весовое значение высоты точки С по ходам (2) и (7), а также по ходу (4), используя среднее весовое значение точки В: НС(1) =
=80,0546 м.
3.Во втором приближении используются средние весовые значения высот точек А, В и С, полученные в 1-м приближении. В третьем приближении
–средние весовые значения высот, полученные во втором приближении и т.д. Высоты исходных реперов остаются одинаковыми во всех приближениях.
Второе, третье и последующие приближения выполняются по схеме, приведенной в п.2. Вычисления (приближения) прекращаются до повторения высот точек в двух соседних шагах, т.е. при первом повторении результатов средних весовых значений высот узловых точек.
4.Вычислить поправки в измеренные превышения по формуле
vi = H 0 − Hi , |
(16.224 ) |
где H0 – уравненное значение высоты узловой точки; Hi – значение высоты узловой точки по i-му ходу.
Получим значения поправок в превышения по последнему приближению:
v1 |
= 80,5048 − 80,5120 |
= |
− 7,2мм ; |
|
v2 |
= 80,0538 − 80,0500 |
= |
+ 3,8мм ; |
|
v3 |
= 80,0548 |
− 80,5040 |
= + 0,8мм ; |
|
v3 |
= 81,7090 |
− 81,7098 |
= − 0,8мм (знак зависит от направления движения); |
|
v4 |
= 81,7090 − 81,7058 = |
+ 3,2мм ; |
||
v4 |
= 80,0538 − 80,0570 = |
− 3,2мм (знак зависит от направления движения); |
||
v5 |
= 80,5048 − 80,4990 = − 5,8мм ; |
|||
v6 |
= 81,7090 |
− 81,7120 |
= − 3,0мм ; |
|
494