

- •Предисловие
- •Глава 1. Вводная часть
- •§ 1. Предмет и задачи геодезии
- •§ 2. Краткие исторические сведения
- •§ 3. Единицы измерений, применяемые в геодезии
- •§ 4. Фигура и размеры Земли
- •§ 5. Содержание курса и рекомендации по его изучению
- •Глава 2. Топографические карты и планы
- •§ 6. Влияние кривизны Земли на измеренные расстояния
- •§ 7. Краткие сведения о картографических проекциях
- •§ 8. Общие сведения о топографических картах и планах
- •§ 9. Система географических координат
- •§ 10. Равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера
- •§ 11. Разграфка и номенклатура топографических карт и планов
- •§ 12. Зональная система плоских прямоугольных координат Гаусса
- •§ 13. Перевычисление координат из зоны в зону
- •§ 14. Система высот
- •§ 15. Условные знаки топографических карт и планов
- •§ 16. Изображение рельефа на топографических картах и планах
- •§ 17. Ориентирование
- •§ 18. Решение некоторых задач с использованием топографической карты
- •18.1. Измерение расстояний
- •18.2. Определение географических и прямоугольных координат
- •18.3. Ориентирование линий
- •18.4. Ориентирование карты на местности
- •18.5. Определение высот точек
- •18.6. Построение профиля
- •18.7. Построение линии заданного уклона
- •18.9. Определение площадей на топографических картах и планах
- •§ 19. Виды измерений
- •§ 20. Классификация погрешностей измерений
- •§ 21. Свойства случайных погрешностей
- •§ 22. Среднее арифметическое
- •§ 23. Средняя квадратическая погрешность
- •§ 24. Средние квадратические погрешности функций измеренных величин
- •§ 25. Обработка ряда равноточных измерений одной величины
- •§ 26. Об учете систематических погрешностей в измерениях
- •§ 27. Средняя квадратическая погрешность двойных равноточных однородных измерений
- •§ 28. Понятие о весе результата измерения
- •§ 29. Средняя квадратическая погрешность единицы веса и арифметической середины
- •§ 30. Обработка ряда неравноточных измерений одной величины
- •Глава 4. Государственные геодезические сети
- •§ 31. Назначение Государственных геодезических сетей
- •§ 32. Классы геодезических сетей
- •§ 33. Методы построения Государственных геодезических сетей
- •§ 34. Закрепление пунктов геодезических сетей
- •§ 35. Оценка точности построения опорных геодезических сетей
- •§ 36. Оценка точности построения сетей триангуляции
- •§ 37. Оценка точности построения звена полигонометрии
- •§ 38. Оценка точности построения сетей трилатерации
- •Глава 5. Геодезические приборы
- •§ 39. Классификация геодезических приборов
- •§ 40. Теодолиты
- •§ 41. Зрительные трубы
- •§ 42. Уровни и компенсаторы наклона
- •§ 43. Устройство теодолита
- •§ 44. Установка теодолита в рабочее положение
- •§ 45. Измерение горизонтальных углов и углов наклона
- •45.1. Способ приемов
- •45.2. Способ повторений
- •45.3. Способ круговых приемов
- •45.4. Измерение углов наклона
- •§ 46. Поверки теодолитов
- •§ 47. Нивелиры
- •§ 48. Устройство нивелира
- •§ 49. Нивелирные рейки
- •§ 50. Установка нивелира в рабочее положение
- •§ 51. Измерение превышений
- •§ 52. Поверки нивелиров
- •§ 53. Приборы для линейных измерений
- •§ 54. Гироскопические приборы
- •§ 55. Приборы для поиска подземных коммуникаций
- •Глава 6. Оптико-электронные геодезические приборы
- •§ 56. Общие замечания
- •§ 57. Краткие сведения о лазерных источниках излучения
- •§ 58. Электромагнитные дальномеры
- •§ 59. Светодальномеры
- •§ 60. Интерферометры
- •§ 61. Угломерные приборы
- •§ 62. Электронные тахеометры
- •§ 63. Электронные нивелиры
- •§ 64. Лазерные приборы
- •Глава 7. Построение съемочного обоснования
- •§ 65. Назначение и виды теодолитных ходов
- •§ 66. Прямая и обратная геодезические задачи на плоскости
- •§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
- •§ 68. Привязка теодолитных ходов
- •68.1. Способ примыкания
- •68.2. Прямая угловая засечка
- •68.3. Линейная засечка
- •68.4. Обратная угловая засечка
- •68.5. Комбинированные засечки
- •68.6. Задача П.А.Ганзена
- •§ 69. Особые системы теодолитных ходов
- •§ 70. Снесение координат с вершины знака на землю
- •§ 71. Определение элементов приведения и редукции
- •§ 72. Привязка теодолитных ходов к стенным геодезическим знакам
- •§ 73. Спутниковые методы определения координат
- •§ 74. Организация полевых работ при построении съемочного обоснования
- •74.1. Рекогносцировка и закрепление точек съемочного обоснования
- •74.2. Подготовка абрисов горизонтальной съемки
- •74.3. Поверки теодолита и нивелира
- •74.4. Компарирование мерных приборов
- •74.5. Измерение длин линий
- •74.6. Измерение горизонтальных углов и углов наклона
- •§ 75. Вычисления в разомкнутом теодолитном ходе
- •75.1. Предварительные вычисления
- •75.2. Обработка результатов угловых измерений
- •75.3. Вычисление приращений координат и оценка точности хода
- •75.4. Рекомендации к поиску вероятных погрешностей в измерениях и вычислениях при обработке ведомости координат
- •75.5. Уравнивание приращений координат и вычисление координат точек хода
- •75.6. Обработка ведомости высот
- •§ 76. Вычисления в замкнутом теодолитном ходе
- •76.1. Оценка точности угловых измерений и вычисление дирекционных углов
- •76.2. Вычисление приращений координат и оценка точности хода
- •76.3. Уравнивание приращений координат и вычисление координат точек хода
- •76.4. Обработка ведомости высот
- •§ 77. Обработка диагонального хода
- •Глава 8. Топографические съемки
- •§ 78. Назначение и виды топографических съемок
- •§ 79. Понятие о цифровой модели местности
- •§ 80. Теодолитная съемка
- •§ 81. Тахеометрическая съемка
- •§ 82. Составление плана местности по результатам топографической съемки
- •82.2. Нанесение на план точек съемочного обоснования
- •82.3. Нанесение на план результатов тахеометрической съемки
- •82.4. Рисовка рельефа и ситуации
- •82.5. Построение на плане ситуации по результатам теодолитной съемки
- •Глава 9. Нивелирные работы
- •§ 83. Способы и методы нивелирования
- •§ 84. Способы геометрического нивелирования
- •§ 85. Основные источники погрешностей геометрического нивелирования
- •§ 86. Техническое нивелирование
- •§ 87. Трассирование
- •§ 88. Расчет и разбивка главных точек кривых на трассе
- •§ 89. Нивелирование поперечных профилей
- •§ 90. Обработка результатов нивелирования трассы
- •§ 91. Построение профиля трассы
- •§ 92. Построение проектной линии
- •§ 93. Построение поперечного профиля и проектного полотна дороги
- •§ 94. Нивелирование площадей
- •Глава 10. Геодезические разбивочные работы
- •§ 95. Назначение и организация разбивочных работ
- •§ 96. Построение на местности проектного горизонтального угла
- •§ 97. Построение на местности проектного расстояния
- •§ 99. Способы разбивочных работ
- •§ 100. Расчет разбивочных элементов
- •§ 101. Разбивочные работы при трассировании
- •§ 102. Разбивка фундаментов инженерных сооружений
- •§ 103. Оценка точности разбивочных работ
- •Глава 11. Геодезические работы в строительстве
- •§ 104. Общие положения
- •§ 105. Краткие сведения об объектах строительства
- •§ 106. Геодезические работы при строительстве промышленных сооружений
- •§ 107. Геодезические работы при строительстве гражданских зданий
- •§ 108. Геодезические работы при строительстве дорог и мостовых сооружений
- •§ 109. Геодезические работы при планировании и застройке населенных пунктов
- •§ 110. Геодезические работы при строительстве подземных коммуникаций
- •§ 111. Геодезические работы при строительстве гидротехнических сооружений
- •Глава 12. Геодезические работы в подземном строительстве
- •§ 115. Горизонтальная соединительная съемка
- •115.2. Горизонтальная соединительная съемка через один шахтный ствол
- •§ 116. Вертикальная соединительная съемка
- •§ 117. Подземная горизонтальная съемка
- •§ 118. Подземная вертикальная съемка
- •§ 119. Геодезические разбивочные работы в подземном строительстве
- •§ 120. Задачи и содержание топографо-геодезических работ
- •§ 121. Точность геодезических работ
- •§ 122. Создание топографических карт и планов
- •§ 123. Разбивка геодезических сеток и профильных линий
- •§ 124. Разбивочные работы при проведении геологической разведки
- •§ 126. Виды деформаций инженерных сооружений
- •§ 127. Задачи наблюдений и организация работ
- •§ 128. Геодезические знаки и их конструкции
- •§ 129. Размещение геодезических знаков на инженерных сооружениях
- •§ 130. Точность измерения деформаций
- •§ 131. Периодичность наблюдений
- •§ 132. Наблюдения за вертикальными перемещениями
- •§ 133. Наблюдения за горизонтальными смещениями
- •§ 134. Наблюдения за кренами
- •§ 135. Наблюдения за деформациями земной поверхности
- •§ 136. Разработка методики наблюдений
- •§ 137. Обработка и анализ результатов наблюдений
- •Глава 15. Особенности точных и высокоточных измерений
- •§ 138. Основные группы погрешностей измерений
- •§ 139. Учет влияния рефракции атмосферы
- •§ 140. Высокоточное и точное геометрическое нивелирование
- •§ 141. Нивелирование I класса
- •§ 142. Нивелирование II класса
- •§ 143. Нивелирование III и IV классов
- •§ 144. Особенности точного и высокоточного нивелирования при наблюдениях за деформациями
- •§ 145. Высокоточные и точные угловые измерения
- •§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
- •Глава 16. Уравнивание геодезических построений
- •§ 147. Основные задачи уравнительных вычислений
- •§ 148. Метод наименьших квадратов
- •§ 149. Классификация основных способов уравнивания
- •§ 150. Основные геометрические условия, возникающие в построениях
- •150.1. Условие фигуры
- •150.2. Условие горизонта
- •150.3. Условие суммы углов
- •150.4. Условие дирекционных углов
- •150.5. Условие сторон
- •150.6. Условие полюса
- •150.7. Условие координат
- •§ 151. Методы решения систем линейных нормальных уравнений
- •151.1. Способ последовательной подстановки
- •151.2. Способ матричных преобразований
- •151.3. Решение систем линейных уравнений по алгоритму Гаусса
- •151.4. Способ краковянов
- •§ 152. Коррелатный способ уравнивания
- •§ 153. Примеры коррелатного способа уравнивания
- •153.1. Уравнивание углов в полигоне
- •153.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •153.3. Уравнивание полигонометрического хода
- •153.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •153.5. Уравнивание триангуляции
- •153.6. Уравнивание триангуляции по условию координат
- •§ 154. Параметрический способ уравнивания
- •§ 155. Примеры параметрического способа уравнивания
- •155.1. Уравнивание углов в полигоне
- •155.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •155.3. Уравнивание полигонометрического хода
- •155.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •155.5. Уравнивание направлений в триангуляции
- •§ 156. Способ раздельного уравнивания
- •156.1. Уравнивание полигонометрического хода
- •156.2. Система полигонометрических ходов с одной узловой точкой
- •156.3. Система нивелирных ходов с одной узловой точкой
- •§ 157. Способ эквивалентной замены
- •§ 158. Способ полигонов В.В.Попова
- •§ 159. Способ последовательных приближений
- •§ 160. Оценка точности уравненных элементов и их функций
- •160.1. Общие положения
- •160.2. Оценка точности при уравнивании коррелатным способом
- •160.3. Оценка точности при уравнивании параметрическим способом
- •Предметный указатель
- •Список литературы
- •Оглавление
3. − 0,954 ξ 3 + 1,863η 3 + 3,120 ξ 4 + 1,932η 4 + 0,061 = 0
(16.212)
4. − 2,309 ξ 3 − 3,933η 3 + 1,932 ξ 4 + 13,366η 4 |
+ 0,666 = 0 |
|
||||||
Из решения системы уравнений (16.212) значения поправок равны: |
||||||||
|
|
ξ 3 |
= + 0,026 дм = + 2,6мм;...η 3 |
= + 0,263 дм = + 26,3мм; |
||||
|
|
ξ 4 |
= + 0,207 дм = − 20,7мм;...η 4 = + 0,062 дм = |
+ 6,2мм |
||||
Полученные поправки следует ввести в значения предварительных |
||||||||
координат пунктов 3 и 4 (табл. 16.54). |
|
|
|
|
||||
Вычисляем поправки (в секундах) в направления: δ z1 = + 0,05 ; δ z2 = − 0,40 |
||||||||
; δ z3 = − 0,16 ; δ z4 = |
+ 0,23 . |
|
|
|
|
|
||
Используя первоначальные формулы поправок (16.207), определим |
||||||||
поправки (в секундах) в направления и в измеренные углы: |
||||||||
ν 12 |
= |
− 0,05 + 0,09 = + 0,04 |
ν β 1 = ν 13 − ν 12 = − 0,31 − 0,04 = − 0,35 |
|||||
ν 13 |
= − 0,05 + 0,01 − 0,28 = − 0,31 |
ν β 2 |
= ν 21 − ν 23 |
= 0,13 + 0,14 = + 0,27 |
||||
ν 14 |
= |
− 0,05 + 0,14 + 0,20 = + 0,29 |
ν β 3 = ν 32 − ν 31 |
= − 0,49 − 0,62 = − 1,11 |
||||
ν 21 |
= |
0,40 − 0,27 = + 0,13 |
|
å ν β (1) = − 1,19 (невязка = +1,2) |
||||
ν 23 |
= 0,40 − 0,81 + 0,27 = |
− 0,14 |
|
|
|
|
||
ν 31 |
= 0,16 + 0,01 + 0,45 = |
+ 0,62 |
|
|
|
|
||
ν 32 |
= 0,16 − 0,81 + 0,16 = − 0,49 |
ν β 4 |
= ν 14 |
− ν 13 |
= 0,29 + 0,31 = + 0,60 |
|||
ν 34 |
= 0,16 + 0,31 − 0,62 = − 0,15 |
ν β 5 |
= ν 31 − ν 34 |
= 0,62 + 0,15 = + 0,77 |
||||
ν 41 |
= |
− 0,23 + 0,14 − 0,43 = − 0,52 |
ν β 6 |
= ν 43 |
− ν 41 |
= 0,50 + 0,52 = + 1,02 |
||
ν 43 |
= |
− 0,23 + 0,31 + 0,42 = + 0,50 |
å ν β (2) = |
+ 2,39 (невязка = -2,4) |
||||
Убеждаемся, что поправки вычислены правильно. Небольшое несоответствие в величинах практических невязок и сумм поправок вполне объясняется погрешностями округлений.
Предлагаем самостоятельно закончить дальнейшую обработку уравнивания с выполнением необходимых контрольных вычислений.
§ 156. Способ раздельного уравнивания
156.1. Уравнивание полигонометрического хода
Этот способ рассматривался ранее при обработке разомкнутого теодолитного хода (гл. 7).
Суть способа заключается в следующем.
1.Уравнивают горизонтальные углы (дирекционные углы), распределяя полученную угловую невязку поровну во все углы, либо нарастающим итогом – в дирекционные углы, вычисленные по измеренным горизонтальным углам. Полученные значения дирекционных углов полагают уравненными и
вдальнейшем других поправок в них уже не вводят.
2.Вычисляют по уравненным дирекционным углам и измеренным сто-
ронам приращения координат. Невязки Wx и Wy распределяют по соответствующим приращениям пропорционально длинам сторон, которые использовались для вычисления данного приращения:
478
|
|
W |
|
|
W |
|
|||
ν |
xi = − |
x |
di ; |
ν |
yi = − |
y |
di |
(16.213) |
|
[di ] |
|||||||||
[di ] |
|||||||||
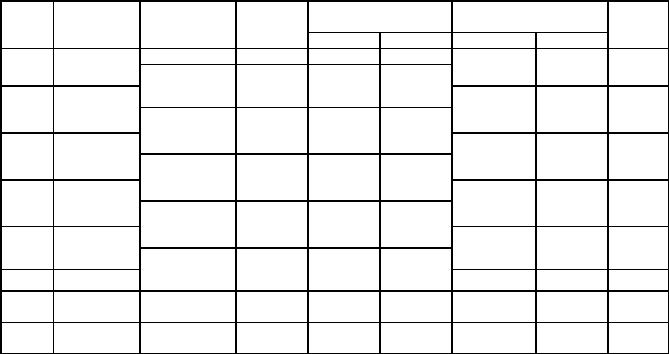
В качестве практического уравнивания рассмотрим полигонометрический ход, приведенный в примерах п. 153.3 и п. 155.3.
Весь процесс уравнивания приведен в табл. 16.58.
Таблица 16.58
№№ |
Гориз.углы |
Дирекц.углы |
Рассто- |
Приращения |
Координаты, м |
№№ |
||
точек |
β |
α |
яния |
координат, м |
|
|
точек |
|
|
|
|
s , м |
Δх |
Δу |
Х |
Y |
|
А |
|
137°13'16,4" |
|
Ход (1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
-0,8" |
|
|
|
|
8365,344 |
5240,647 |
В |
|
112°36'45,4" |
69°50'01,8" |
1245,638 |
+429,431 |
+1169,275 |
|
|
|
|
|
|
|
|
||||
1 |
-0,9" |
|
|
-0,006 |
+0,005 |
8794,769 |
6409,927 |
1 |
|
|
|
|
|||||
|
213°02'16,8" |
102°52'18,6" |
963,017 |
-214,524 |
+938,819 |
|
|
|
|
|
|
|
|
||||
2 |
-0,9" |
|
|
-0,005 |
+0,003 |
8580,240 |
7348,749 |
2 |
|
|
|
|
|||||
|
88°44'26,7" |
11°36'45,3" |
1033,151 |
+1012,006 |
+207,953 |
|
|
|
|
|
|
|
|
||||
С |
-0,9" |
|
|
-0,005 |
+0,004 |
9592,241 |
7556,706 |
С |
|
|
|
|
|||||
|
269°22'04,0" |
100°58'49,3" |
[di] |
[Δx] |
[Δy] |
|
|
|
|
|
|
|
|
||||
D |
|
|
3241,806 |
+1226,913 |
+2316,047 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исходный |
|
[Δx](теор) |
[Δy](теор) |
|
|
|
|
|
100°58'45,8" |
|
+1226,897 |
+2316,059 |
|
|
|
|
|
Wβ = +3,5" |
|
Wx |
Wy |
|
|
|
|
|
|
|
+0,016 |
-0,012 |
|
|
|
Пояснения к расчетам в табл. 16.58.
1.Угловая невязка (+3,5") получена как разность вычисленного и исходного дирекционных углов конечной линии хода.
2.Поправки в углы распределены поровну с обратным невязке знаком.
3.Невязки в приращениях координат равны разности сумм приращений и разности координат конечной и начальной точек хода:
Wx = +1226,913 – (9592,241 – 8365,344) = + 0,016 м; Wy = +2316,047 – (7556,706 – 5240,647) = - 0,012 м.
4.Окончательные значения координат точек вычислены с учетом поправок в приращения координат.
156.2. Система полигонометрических ходов с одной узловой точкой
Задача. Сгущение геодезической сети для выполнения разбивочных работ на строительной площадке шахтного ствола.
При рекогносцировке геодезической сети выявилось, что ближайшие исходные пункты находятся примерно в 2-х км от проектного центра шахтного ствола: № 1365 – пункт 2 класса, № 742 и № 751 – пункты 3 класса. Два пункта 2 класса, № 1368, видимый с пунктов № 1365 и № 742, и № 1363, видимый с пункта № 751, находятся на расстоянии примерно 12 и 8 км соответственно. На местности закреплены точки системы полигонометри-
479
ческих ходов 2 разряда с одной узловой точкой 3 и узловой линий 3-4 (рис. 16.15).
Рис. 16.15. Система полигонометрических ходов с одной узловой точкой
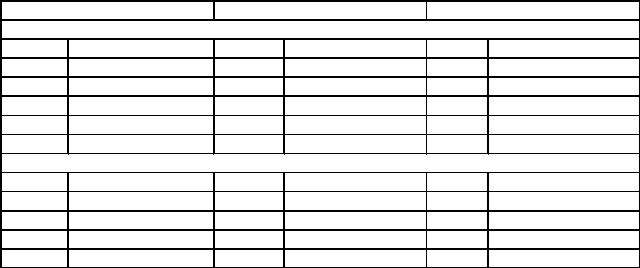
Координаты исходных пунктов № 1365, № 742 и № 751 и дирекционные углы исходных направлений приведены в табл. 16.59.
|
|
|
|
Таблица 16.59 |
|
|
|
|
|
№№ |
Х, м |
Y, м |
Обозначение |
Значение дирекционного |
исходны |
|
|
дирекционного |
угла |
х |
|
|
угла |
прямой (обратный) |
пунктов |
|
|
|
|
1365 |
22324,647 |
8507,422 |
α1365-1368 |
38о42'18" |
|
|
|
|
(218о42'18") |
742 |
21838,950 |
11724,604 |
α 742-1368 |
320о02'04" |
|
|
|
|
(140о02'04") |
751 |
18548,319 |
9477,758 |
α 751-1363 |
111о15'47" |
|
|
|
|
(291о15'47") |
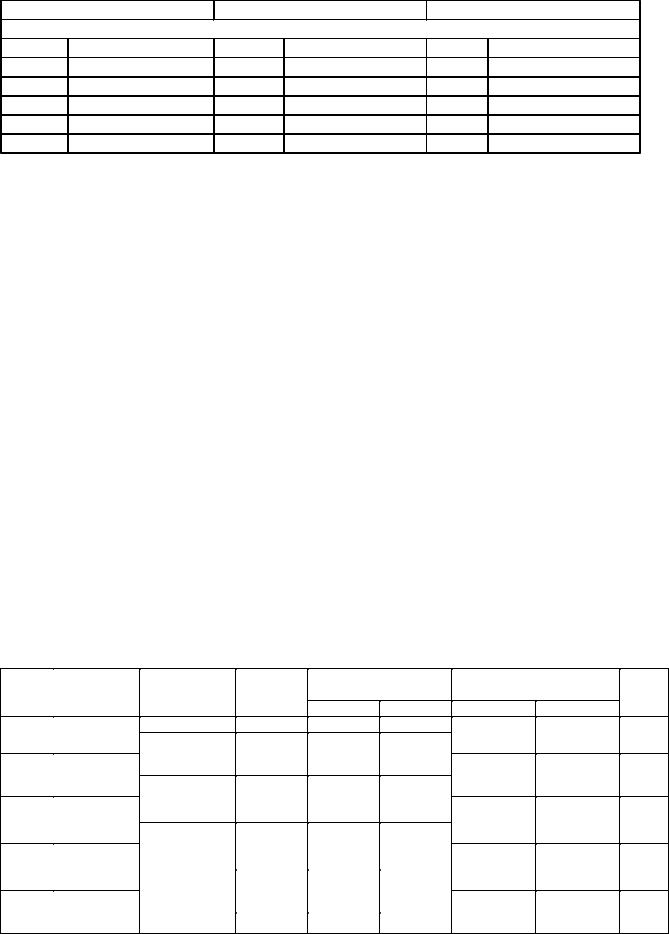
Значения измеренных углов и расстояний (горизонтальных проложений) приведены в табл 16.60.
480
|
|
|
|
|
Таблица 16.60 |
|
Ход (1) |
|
Ход (2) |
|
Ход (3) |
|
Г о р и з о н т а л ь н ы е |
у г л ы |
|
||
β1 |
92о49'25" |
β 8 |
272о28'00" |
β 13 |
220о36'28" |
β 2 |
191о24'18" |
β 7 |
191о44'05" |
β 12 |
222о54'35" |
β 3 |
170о30'05" |
β 6 |
190о15'40" |
β 11 |
201о33'50" |
β 4 |
121о03'16" |
|
|
β 10 |
165о58'16" |
|
|
|
|
β 9 |
147о39'00" |
|
|
|
|
β 5 |
264о32'05" |
|
|
Р а с с т о я н и я, м |
|
||
S1 |
551,384 |
S6 |
738,949 |
S11 |
523,623 |
S2 |
859,047 |
S5 |
862,212 |
S10 |
441,504 |
S3 |
580,120 |
S4 |
521,708 |
S9 |
601,946 |
|
|
|
|
S8 |
603,005 |
|
|
|
|
S7 |
401,338 |
Решение задачи раздельного уравнивания производится с учетом весовых характеристик полигонометрических ходов: для дирекционных углов – число n углов в ходе; для координат – длина хода.
1. Вычисление вероятнейшего значения дирекционного угла узловой линии 3-4 по ходам (1), (2), (3).
Дирекционный угол узловой линии вычисляется в данном случае трижды, по каждому полигонометрическому ходу, по формуле левых (см. рис. 16.15) горизонтальных углов (7.65):
α
α
α
3− 4(1) |
= α 1368 − 1365 |
+ å β (1) |
± n(1)180 0 |
± |
R ×360 0 |
= |
74 0 29′22′′ |
|
3− 4(2) |
= α 1368 − 742 |
+ |
å β (2) |
± n(2)180 0 |
± |
R ×360 0 |
= |
74 0 29′49′′ |
3− 4(3) |
= α 1363 − 751 |
+ |
å β (3) |
± n(3) 180 0 |
± R ×360 0 |
= 74 030′01′′ |
||
Здесь следует иметь в виду, что при вычислении по ходу (2) дирекционный угол узловой линии получится обратным. Поэтому его необходимо будет изменить на 180о.
Веса дирекционных углов определим для единицы веса ne = 4 ( pi = ne / ni ):
|
pα (1) = 1 ; |
pα (2) = 1,33 ; pα (3) = 0,67 . |
|||
Вероятнейшее значение дирекционных углов находим по формуле |
|||||
(3.39): |
α 3− 4(1) рα (1) |
+ α 3− 4(2) рα (2) |
+ α 3− 4(3) рα (3) |
|
|
α 3− 4 = |
= 74 0 29′43′′ . |
||||
рα (1) + рα (2) + |
|
||||
|
рα (3) |
||||
2. Уравнивание горизонтальных углов.
Угловые невязки в каждом из полигонометрических ходов определяем по формуле (7.67), считая, что конечный дирекционный угол равен вероятнейшему значению дирекционного угла узловой линии. В соответствии с
этим получим: fβ(1) = - 21" ; fβ(2) = + 6" ; fβ(3) = + 18" .
Поправки в углы распределяем поровну по формуле (7.71). Таким образом, в углы хода (1) необходимо будет внести поправки по + 5" (а в один из углов - + 6"), в углы хода (2) – по - 2", хода (3) – по - 3". Значения уравненных горизонтальных углов приведены в табл. 16.61.
481
|
|
|
|
|
Таблица 16.61 |
|
Ход (1) |
|
Ход (2) |
|
Ход (3) |
|
У р а в н е н н ы е |
|
г о р и з о н т а л ь н ы е |
у г л ы |
|
β1 |
92о49'30" |
β 8 |
272о27'58" |
β 13 |
220о36'25" |
β 2 |
191о24'24" |
β 7 |
191о44'03" |
β 12 |
222о54'32" |
β 3 |
170о30'10" |
β 6 |
190о15'38" |
β 11 |
201о33'47" |
β 4 |
121о03'21" |
|
|
β 10 |
165о58'13" |
|
|
|
|
β 9 |
147о38'57" |
|
|
|
|
β 5 |
264о32'02" |
3. Вычисление вероятнейших значений координат узловой точки 3 по ходам (1), (2), (3).
Координаты точки 3 в каждом из полигонометрических ходов определяем по формулам прямой геодезической задачи :
X 3(i) = X НАЧ (i) + å |
(d cos α )(i) |
(16.214) |
|
Y3(i) = YНАЧ (i) + å (d sin α )(i) |
|||
|
|||
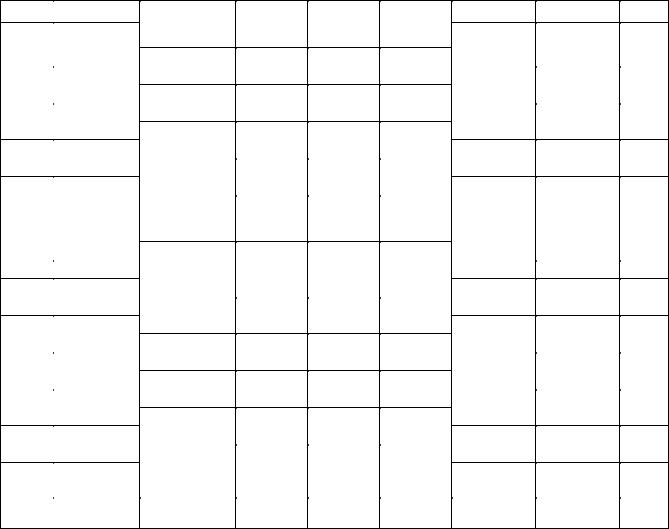
Вычисления с учетом уравненных значений горизонтальных углов приведены в табл. 16.62.
Примечание. Если длины сторон, образующих углы, заметно отличаются, то в горизонтальные углы, а затем и в дирекционные углы, можно вводить весовые поправки, предварительно определив веса углов.
По ходам (1), (2) и (3) вычисляем значения приращений координат и координат узловой точки 3, используя для этого значения уравненных дирекционных углов. Неуравненные значения координат точек ходов приведены в ведомости в скобках.
Определяем весовые характеристики ходов (1), (2), (3). В качестве единицы веса принимаем примерно среднюю длину хода (sе = 2000 м). Тогда
p(1) |
= |
sе |
= |
|
2000 |
|
|
= 1,005; |
|
|
p(2) = |
|
sе |
= |
|
2000 |
= 0,942; |
|||||||
s(1) |
1990 ,551 |
|
|
|
s(2) |
2122 ,869 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
p(3) |
= |
sе |
|
= |
|
2000 |
|
|
|
= 0,778 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(3) |
2571,416 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 16.62 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
№№ |
|
Гориз.углы |
|
Дирекц.углы |
Рассто- |
Приращения |
|
|
|
Координаты, м |
№№ |
|||||||||||||
точек |
|
|
|
β |
|
|
|
α |
яния |
координат, м |
|
|
|
|
|
|
|
|
|
точек |
||||
|
|
|
|
|
|
|
|
|
|
|
|
s , м |
Δx |
Δy |
|
|
|
X |
|
|
|
|
Y |
|
1368 |
|
|
|
|
|
|
|
|
|
|
|
Ход (1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
218°42'18" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
1365 |
92°49'30" |
|
|
|
|
|
|
|
|
22324,647 |
|
|
8507,422 |
1365 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
131°31'48" |
551,384 |
-365,574 |
+412,771 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(+0,032) |
0,000 |
|
|
|
|
|
|
|
|
|
|
1 |
|
191°14'24" |
|
|
|
|
|
|
(21959,073) |
|
(8920,193) |
1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21959,105 |
|
|
8920,193 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
142°56'12" |
859,047 |
-685,494 |
+517,745 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(+0,050) |
0,000 |
|
|
|
|
|
|
|
|
|
|
2 |
|
170°30'10" |
|
|
|
|
|
|
(21273,579) |
|
(9437,938) |
2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21273,661 |
|
|
9437,938 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
133°26'22" |
580,120 |
-398,883 |
+421,226 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(+0,034) |
0,000 |
|
|
|
|
|
|
|
|
|
|
3 |
|
121°03'21" |
|
|
|
|
|
|
(20874,696) |
|
(9859,164) |
3 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20874,812 |
|
|
9859,164 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
74°29'43" |
[di] |
WX(1) |
WY(1) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
482
|
|
|
|
|
|
|
|
|
1990,551 |
-0,116 |
|
|
|
-0,000 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1368 |
|
|
|
|
|
|
|
|
|
|
|
Ход (2) |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
140°02'04" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
742 |
|
272°27'58" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21838,950 |
11724,604 |
|
|
742 |
|
|
|
|
232°30'02" |
|
|
738,949 |
|
-449,838 |
|
|
-586,252 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,016 |
|
|
+0,009 |
|
|
|
|
|
||||
5 |
|
191°44'03" |
|
|
|
|
|
|
|
|
|
(21389,112) |
(11138,352) |
|
|
5 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21389,096 |
11138,361 |
|
|
|
|||
|
|
|
244°14'05" |
|
|
862,212 |
|
-374,791 |
|
|
-776,493 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,019 |
|
|
+0,0011 |
|
|
|
|
|
||||
4 |
|
190°15'38" |
|
|
|
|
|
|
|
|
|
(21014,321) |
10361,859) |
|
|
4 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21014,286 |
10361,879 |
|
|
|
|||
|
|
|
254°29'43" |
|
|
521,708 |
|
-139,462 |
|
|
-502,722 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,012 |
|
|
+0,007 |
|
|
|
|
|
||||
3 |
|
|
|
|
|
|
|
|
|
|
|
(20874,859) |
(9859,137) |
|
|
3 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20874,812 |
|
9859,164 |
|
|
|
|
|
|
|
|
|
|
|
|
|
[di] |
|
WX(2) |
|
|
|
|
WY(2) |
|
|
|||||
|
|
|
|
|
|
|
|
|
2122,869 |
+0,047 |
|
|
-0,027 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ход (3) |
|
|
|
|
|
|
|
|
|
|
||
1363 |
|
|
291°15'47" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
751 |
|
220°36'25" |
|
|
|
|
|
|
|
|
|
|
|
|
18548,319 |
|
9477,758 |
|
|
751 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
331°52'12" |
|
|
523,623 |
|
+461,773 |
|
|
-246,874 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,019 |
|
|
-0,007 |
|
|
|
|
|
||||
9 |
|
222°54'32" |
|
|
|
|
|
|
|
|
|
(19010,092) |
(9230,884) |
|
|
9 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19010,073 |
|
9230,877 |
|
|
|
||
|
|
|
14°46'44" |
|
|
441,504 |
|
+426,898 |
|
|
+112,623 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,016 |
|
|
-0,006 |
|
|
|
|
|
||||
8 |
|
201°33'47" |
|
|
|
|
|
|
|
|
|
(19436,990) |
(9343,507) |
|
|
8 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19436,955 |
|
9343,494 |
|
|
|
||
|
|
|
36°20'31" |
|
|
601,946 |
|
+484,864 |
|
|
+356,715 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,022 |
|
|
-0,008 |
|
|
|
|
|
||||
7 |
|
165°58'13" |
|
|
|
|
|
|
|
|
|
(19921,854) |
(9700,222) |
|
|
7 |
||||||||
|
|
|
22°18'44" |
|
|
603,005 |
|
+557,857 |
|
|
+228,933 |
19921,797 |
|
9700,201 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,022 |
|
|
-0,008 |
|
|
|
|
|
||||
6 |
|
147°38'57" |
|
|
|
|
|
|
|
|
|
(20479,711) |
(9929,155) |
|
|
6 |
||||||||
|
|
|
349°57'41" |
|
|
401,338 |
|
+395,194 |
|
|
-69,958 |
20479,632 |
|
9929,126 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
-0,014 |
|
|
-0,004 |
|
|
|
|
|
||||
3 |
|
264°32'02" |
|
|
|
|
|
|
|
|
|
(20874,905) |
(9859,197) |
|
|
3 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20874,812 |
|
9859,164 |
|
|
|
4 |
|
|
74°29'43" |
|
|
|
[di] |
|
WX(3) |
|
|
|
|
WY(3) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2571,416 |
+0,093 |
|
|
+0,033 |
|
|
|
|
|
|
|||||
|
Находим по формуле (3.39) вероятнейшие значения координат узловой |
|
||||||||||||||||||||||
точки 3: |
|
X 3(1) p(1) + |
X 3(2) p(2) |
+ |
X 3(3) p(3) |
|
|
|
|
Y3(1) p(1) + Y3(2) p(2) |
+ Y3(3) p(3) |
|
||||||||||||
|
|
X 3 |
= |
; |
Y3 = |
|
||||||||||||||||||
|
|
|
|
|
|
p(1) + p(2) + |
p(3) |
|
|
|
|
|
|
p(1) + p(2) + |
p(3) |
|
|
|||||||
|
Получим Х3 |
= 20874,812 м ; Y3 = 9859,164 м. |
|
|
|
|
|
(16.214) |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
4. Уравнивание координат точек полигонометрических ходов. |
|
|
|
|
|||||||||||||||||||
|
Вычисляем значения невязок в координатах точки 3 по формулам |
|
||||||||||||||||||||||
|
|
|
WХ (i) |
= X 3(i) |
− X 3 ; WY (i) = Y3(i ) − Y3 ; |
|
|
(16.215) |
|
|||||||||||||||
|
Полученные значения невязок в координатах приведены в табл. 16. |
|
||||||||||||||||||||||
|
На этом этапе расчетов необходимо убедиться в качестве выполненных |
|
||||||||||||||||||||||
полевых работ. Для этого по формулам (7.80) и (7.81) вычисляют абсолют- |
|
|||||||||||||||||||||||
ную и относительную невязки по каждому из ходов и сравнивают их с |
|
|||||||||||||||||||||||
допустимой невязкой для принятого разряда геодезического построения. |
|
|||||||||||||||||||||||
|
Вычисляем значения поправок в приращения координат по формулам |
|
||||||||||||||||||||||
|
|
ν xj (i) = − |
|
WXj |
|
d j (i) |
; |
ν |
yj (i) = − |
WYj |
|
d j (i) |
|
|
(16.216) |
|
||||||||
|
|
|
[d j ](i) |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
[d j ](i) |
|
|
|
|||||||||||
Полученные поправки выписаны в ведомость под значениями приращений координат.
483