

- •Предисловие
- •Глава 1. Вводная часть
- •§ 1. Предмет и задачи геодезии
- •§ 2. Краткие исторические сведения
- •§ 3. Единицы измерений, применяемые в геодезии
- •§ 4. Фигура и размеры Земли
- •§ 5. Содержание курса и рекомендации по его изучению
- •Глава 2. Топографические карты и планы
- •§ 6. Влияние кривизны Земли на измеренные расстояния
- •§ 7. Краткие сведения о картографических проекциях
- •§ 8. Общие сведения о топографических картах и планах
- •§ 9. Система географических координат
- •§ 10. Равноугольная поперечно-цилиндрическая проекция Гаусса-Крюгера
- •§ 11. Разграфка и номенклатура топографических карт и планов
- •§ 12. Зональная система плоских прямоугольных координат Гаусса
- •§ 13. Перевычисление координат из зоны в зону
- •§ 14. Система высот
- •§ 15. Условные знаки топографических карт и планов
- •§ 16. Изображение рельефа на топографических картах и планах
- •§ 17. Ориентирование
- •§ 18. Решение некоторых задач с использованием топографической карты
- •18.1. Измерение расстояний
- •18.2. Определение географических и прямоугольных координат
- •18.3. Ориентирование линий
- •18.4. Ориентирование карты на местности
- •18.5. Определение высот точек
- •18.6. Построение профиля
- •18.7. Построение линии заданного уклона
- •18.9. Определение площадей на топографических картах и планах
- •§ 19. Виды измерений
- •§ 20. Классификация погрешностей измерений
- •§ 21. Свойства случайных погрешностей
- •§ 22. Среднее арифметическое
- •§ 23. Средняя квадратическая погрешность
- •§ 24. Средние квадратические погрешности функций измеренных величин
- •§ 25. Обработка ряда равноточных измерений одной величины
- •§ 26. Об учете систематических погрешностей в измерениях
- •§ 27. Средняя квадратическая погрешность двойных равноточных однородных измерений
- •§ 28. Понятие о весе результата измерения
- •§ 29. Средняя квадратическая погрешность единицы веса и арифметической середины
- •§ 30. Обработка ряда неравноточных измерений одной величины
- •Глава 4. Государственные геодезические сети
- •§ 31. Назначение Государственных геодезических сетей
- •§ 32. Классы геодезических сетей
- •§ 33. Методы построения Государственных геодезических сетей
- •§ 34. Закрепление пунктов геодезических сетей
- •§ 35. Оценка точности построения опорных геодезических сетей
- •§ 36. Оценка точности построения сетей триангуляции
- •§ 37. Оценка точности построения звена полигонометрии
- •§ 38. Оценка точности построения сетей трилатерации
- •Глава 5. Геодезические приборы
- •§ 39. Классификация геодезических приборов
- •§ 40. Теодолиты
- •§ 41. Зрительные трубы
- •§ 42. Уровни и компенсаторы наклона
- •§ 43. Устройство теодолита
- •§ 44. Установка теодолита в рабочее положение
- •§ 45. Измерение горизонтальных углов и углов наклона
- •45.1. Способ приемов
- •45.2. Способ повторений
- •45.3. Способ круговых приемов
- •45.4. Измерение углов наклона
- •§ 46. Поверки теодолитов
- •§ 47. Нивелиры
- •§ 48. Устройство нивелира
- •§ 49. Нивелирные рейки
- •§ 50. Установка нивелира в рабочее положение
- •§ 51. Измерение превышений
- •§ 52. Поверки нивелиров
- •§ 53. Приборы для линейных измерений
- •§ 54. Гироскопические приборы
- •§ 55. Приборы для поиска подземных коммуникаций
- •Глава 6. Оптико-электронные геодезические приборы
- •§ 56. Общие замечания
- •§ 57. Краткие сведения о лазерных источниках излучения
- •§ 58. Электромагнитные дальномеры
- •§ 59. Светодальномеры
- •§ 60. Интерферометры
- •§ 61. Угломерные приборы
- •§ 62. Электронные тахеометры
- •§ 63. Электронные нивелиры
- •§ 64. Лазерные приборы
- •Глава 7. Построение съемочного обоснования
- •§ 65. Назначение и виды теодолитных ходов
- •§ 66. Прямая и обратная геодезические задачи на плоскости
- •§ 67. Взаимосвязь дирекционных углов с измеренными на местности горизонтальными углами
- •§ 68. Привязка теодолитных ходов
- •68.1. Способ примыкания
- •68.2. Прямая угловая засечка
- •68.3. Линейная засечка
- •68.4. Обратная угловая засечка
- •68.5. Комбинированные засечки
- •68.6. Задача П.А.Ганзена
- •§ 69. Особые системы теодолитных ходов
- •§ 70. Снесение координат с вершины знака на землю
- •§ 71. Определение элементов приведения и редукции
- •§ 72. Привязка теодолитных ходов к стенным геодезическим знакам
- •§ 73. Спутниковые методы определения координат
- •§ 74. Организация полевых работ при построении съемочного обоснования
- •74.1. Рекогносцировка и закрепление точек съемочного обоснования
- •74.2. Подготовка абрисов горизонтальной съемки
- •74.3. Поверки теодолита и нивелира
- •74.4. Компарирование мерных приборов
- •74.5. Измерение длин линий
- •74.6. Измерение горизонтальных углов и углов наклона
- •§ 75. Вычисления в разомкнутом теодолитном ходе
- •75.1. Предварительные вычисления
- •75.2. Обработка результатов угловых измерений
- •75.3. Вычисление приращений координат и оценка точности хода
- •75.4. Рекомендации к поиску вероятных погрешностей в измерениях и вычислениях при обработке ведомости координат
- •75.5. Уравнивание приращений координат и вычисление координат точек хода
- •75.6. Обработка ведомости высот
- •§ 76. Вычисления в замкнутом теодолитном ходе
- •76.1. Оценка точности угловых измерений и вычисление дирекционных углов
- •76.2. Вычисление приращений координат и оценка точности хода
- •76.3. Уравнивание приращений координат и вычисление координат точек хода
- •76.4. Обработка ведомости высот
- •§ 77. Обработка диагонального хода
- •Глава 8. Топографические съемки
- •§ 78. Назначение и виды топографических съемок
- •§ 79. Понятие о цифровой модели местности
- •§ 80. Теодолитная съемка
- •§ 81. Тахеометрическая съемка
- •§ 82. Составление плана местности по результатам топографической съемки
- •82.2. Нанесение на план точек съемочного обоснования
- •82.3. Нанесение на план результатов тахеометрической съемки
- •82.4. Рисовка рельефа и ситуации
- •82.5. Построение на плане ситуации по результатам теодолитной съемки
- •Глава 9. Нивелирные работы
- •§ 83. Способы и методы нивелирования
- •§ 84. Способы геометрического нивелирования
- •§ 85. Основные источники погрешностей геометрического нивелирования
- •§ 86. Техническое нивелирование
- •§ 87. Трассирование
- •§ 88. Расчет и разбивка главных точек кривых на трассе
- •§ 89. Нивелирование поперечных профилей
- •§ 90. Обработка результатов нивелирования трассы
- •§ 91. Построение профиля трассы
- •§ 92. Построение проектной линии
- •§ 93. Построение поперечного профиля и проектного полотна дороги
- •§ 94. Нивелирование площадей
- •Глава 10. Геодезические разбивочные работы
- •§ 95. Назначение и организация разбивочных работ
- •§ 96. Построение на местности проектного горизонтального угла
- •§ 97. Построение на местности проектного расстояния
- •§ 99. Способы разбивочных работ
- •§ 100. Расчет разбивочных элементов
- •§ 101. Разбивочные работы при трассировании
- •§ 102. Разбивка фундаментов инженерных сооружений
- •§ 103. Оценка точности разбивочных работ
- •Глава 11. Геодезические работы в строительстве
- •§ 104. Общие положения
- •§ 105. Краткие сведения об объектах строительства
- •§ 106. Геодезические работы при строительстве промышленных сооружений
- •§ 107. Геодезические работы при строительстве гражданских зданий
- •§ 108. Геодезические работы при строительстве дорог и мостовых сооружений
- •§ 109. Геодезические работы при планировании и застройке населенных пунктов
- •§ 110. Геодезические работы при строительстве подземных коммуникаций
- •§ 111. Геодезические работы при строительстве гидротехнических сооружений
- •Глава 12. Геодезические работы в подземном строительстве
- •§ 115. Горизонтальная соединительная съемка
- •115.2. Горизонтальная соединительная съемка через один шахтный ствол
- •§ 116. Вертикальная соединительная съемка
- •§ 117. Подземная горизонтальная съемка
- •§ 118. Подземная вертикальная съемка
- •§ 119. Геодезические разбивочные работы в подземном строительстве
- •§ 120. Задачи и содержание топографо-геодезических работ
- •§ 121. Точность геодезических работ
- •§ 122. Создание топографических карт и планов
- •§ 123. Разбивка геодезических сеток и профильных линий
- •§ 124. Разбивочные работы при проведении геологической разведки
- •§ 126. Виды деформаций инженерных сооружений
- •§ 127. Задачи наблюдений и организация работ
- •§ 128. Геодезические знаки и их конструкции
- •§ 129. Размещение геодезических знаков на инженерных сооружениях
- •§ 130. Точность измерения деформаций
- •§ 131. Периодичность наблюдений
- •§ 132. Наблюдения за вертикальными перемещениями
- •§ 133. Наблюдения за горизонтальными смещениями
- •§ 134. Наблюдения за кренами
- •§ 135. Наблюдения за деформациями земной поверхности
- •§ 136. Разработка методики наблюдений
- •§ 137. Обработка и анализ результатов наблюдений
- •Глава 15. Особенности точных и высокоточных измерений
- •§ 138. Основные группы погрешностей измерений
- •§ 139. Учет влияния рефракции атмосферы
- •§ 140. Высокоточное и точное геометрическое нивелирование
- •§ 141. Нивелирование I класса
- •§ 142. Нивелирование II класса
- •§ 143. Нивелирование III и IV классов
- •§ 144. Особенности точного и высокоточного нивелирования при наблюдениях за деформациями
- •§ 145. Высокоточные и точные угловые измерения
- •§ 146. Высокоточные и точные измерения в схемах микротриангуляции, микротрилатерации и короткобазисной полигонометрии
- •Глава 16. Уравнивание геодезических построений
- •§ 147. Основные задачи уравнительных вычислений
- •§ 148. Метод наименьших квадратов
- •§ 149. Классификация основных способов уравнивания
- •§ 150. Основные геометрические условия, возникающие в построениях
- •150.1. Условие фигуры
- •150.2. Условие горизонта
- •150.3. Условие суммы углов
- •150.4. Условие дирекционных углов
- •150.5. Условие сторон
- •150.6. Условие полюса
- •150.7. Условие координат
- •§ 151. Методы решения систем линейных нормальных уравнений
- •151.1. Способ последовательной подстановки
- •151.2. Способ матричных преобразований
- •151.3. Решение систем линейных уравнений по алгоритму Гаусса
- •151.4. Способ краковянов
- •§ 152. Коррелатный способ уравнивания
- •§ 153. Примеры коррелатного способа уравнивания
- •153.1. Уравнивание углов в полигоне
- •153.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •153.3. Уравнивание полигонометрического хода
- •153.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •153.5. Уравнивание триангуляции
- •153.6. Уравнивание триангуляции по условию координат
- •§ 154. Параметрический способ уравнивания
- •§ 155. Примеры параметрического способа уравнивания
- •155.1. Уравнивание углов в полигоне
- •155.2. Уравнивание системы нивелирных ходов с несколькими узловыми точками
- •155.3. Уравнивание полигонометрического хода
- •155.4. Уравнивание системы полигонометрических ходов с двумя узловыми точками
- •155.5. Уравнивание направлений в триангуляции
- •§ 156. Способ раздельного уравнивания
- •156.1. Уравнивание полигонометрического хода
- •156.2. Система полигонометрических ходов с одной узловой точкой
- •156.3. Система нивелирных ходов с одной узловой точкой
- •§ 157. Способ эквивалентной замены
- •§ 158. Способ полигонов В.В.Попова
- •§ 159. Способ последовательных приближений
- •§ 160. Оценка точности уравненных элементов и их функций
- •160.1. Общие положения
- •160.2. Оценка точности при уравнивании коррелатным способом
- •160.3. Оценка точности при уравнивании параметрическим способом
- •Предметный указатель
- •Список литературы
- •Оглавление
Используя данные табл. 16.52 и таблицы координат исходных точек, вычислить уравненные значения дирекционных углов и расстояний (таблица уравненных значений дирекционных углов и расстояний подобна табл. 16.47).
Далее необходимо проверить качество уравнивания всех горизонтальных углов и расстояний по следующей схеме:
-вычислить разность уравненных дирекционных углов направлений, образующих угол ( αB1 – αBA = 117o23'40,4" – 251o08'14,3" = 226o15'26,1");
-вычислить уравненное значение угла, т.е. к измеренному значению
угла прибавить полученную в табл. 16.51 поправку (β1' = 226о15'25,0" + 1,1" = =226о15'26,1"); как видим, разница контрольного угла и уравненного его
значения получились одинаковыми в пределах погрешности округлений; - вычислить уравненное зачение расстояния как сумму измеренного рас-
стояния и поправки в него, полученной в табл. 16.51 (s1' = 475,8850 +0,0228 = =475,8824 м); из решения обратной геодезической задачи получено такое же значение (разности могут быть также в пределах округлений).
Указанные вычисления следует выполнить для всех измеренных и уравненных элементов. После контроля необходимо выполнить обработку полигонометрических ходов с использованием значений уравненных элементов.
155.5. Уравнивание направлений в триангуляции
Порядок уравнивания направлений в триангуляции параметрическим способом следующий.
1.Вычисляют предварительные значения координат определяемых пунктов и дирекционные углы сторон сети.
Здесь, с целью уменьшения влияния нелинейностей дифференцируемых функций, необходимо стремиться к тому, чтобы свободные члены уравнений поправок были как можно меньше по абсолютной величине. Этого можно достичь, если предварительно выполнить уравнивание углов в каждом из треугольников. Невязки в них следует распределить с обратным знаком поровну в каждый угол треугольника.
Из решения обратной геодезической задачи находят дирекционные углы
ирасстояния элементов сети. Предварительные координаты пунктов находят из решения прямых геодезических задач по длинам сторон и дирекционным углам. Значения расстояний находят по теореме синусов, а дирекционные углы – по кратчайшему пути от ближайшей исходной стороны. Если геодезическое построение позволяет использовать для вычисления координат формулы Юнга, то лучше воспользоватья такой возможностью.
2.Определяют коэффициенты a и b уравнений поправок, свободные члены l и составляют параметрические уравнения поправок.
470

Коэффициенты a и b находят по формулам (16.138) и (16.139), либо используют формулы
aki = ρ ′′ |
|
yki |
|
− ρ ′′ |
xki |
|
|
|
|
|
|
|
= k |
yki ; bki = |
|
|
= |
k xki |
(16.194) |
||
2 |
2 |
2 |
2 |
|||||||
|
xki |
+ yki |
|
|
xki + |
yki |
|
|
||
Для контроля лучше выполнять вычисления и по формулам (16.138) и по |
||||||||||
формулам (16.139). |
|
|
|
|
|
|
|
|
|
|
В формулах |
(16.194) |
значения |
приращений |
координат |
берут в |
|||||
километрах. При таком выборе размерностей значения поправок в предварительные координаты получают в децимертах.
Коэффициенты a и b вычисляют с точностью до 0,001 при уравнивании
сетей 2 класса и с точностью 0,01 – при уравнивании сетей 3 и 4 классов. |
|
|||
Свободные члены уравнений поправок находят по формуле |
|
|
|
|
lki = zki0 |
− zk0 , |
å |
(16.195) |
|
где |
0 |
(α ki0 − M ki ) |
, |
|
zk = |
|
n |
||
|
|
|
|
|
|
|
|
(16.196) |
|
zki0 = α ki0 |
− M ki |
|
(16.197) |
|
В формулах (16.195) – (16.197) zk0 |
- предварительное значение ориенти- |
|||
рующего угла в пункте k ; α ki0 - предварительное значение дирекционного угла указанного направления ; Mki – измеренное направление в пункте k на пункт i .
Контроль вычисления свободных членов производится по невязкам W по формуле
lijk + lkji + likj = − W |
(16.198) |
Кроме того, сумма свободных членов на данном пункте |
(16.199) |
[l] = 0 |
Невыполнение указанных условий не более 0,02" при вычислениях до 0,01" и не более 0,2" при вычислениях до 0,1".
Составляют уравнения поправок (16.143)
vki = − δ zk + aki ξ k + bkiη k − aki ξ i − bkiη i + lki
для всех направлений на данном пункте с учетом того (16.147), какой из пунктов исходный и определяемый.
Для упрощения выражений (16.143), уменьшения числа уравнений и исключения из них поправок ориентирования применяют правила Шрейбера.
Правило 1 (исключение поправок ориентирования).
Если одно из неизвестных в параметрических уравнениях поправок имеет коэффициент «минус единица», то для получения нормального уравнения, не содержащего этого неизвестного, его можно опустить в параметрических уравнениях поправок, добавив к ним сумму этих уравнений
(суммарное уравнение) с весом p = − 12n , где 1/2 – вес измеренного
направления, n – число данных направлений.
Пусть имеем несколько (n) уравнений
471
|
|
ν |
|
|
= |
− δ z |
|
+ |
|
a ξ |
|
|
+ |
b η |
|
− |
|
a ξ |
|
− |
b η |
|
+ |
|
l |
|
;......p = |
|
1 |
2 |
|
|||||||||||||||
|
|
|
k1 |
|
|
|
k |
|
|
|
|
k1 k |
|
|
|
k1 k |
|
|
|
k1 1 |
|
k1 1 |
|
|
|
k1 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
ν |
k 2 |
|
= |
− δ z |
|
+ |
a |
k 2 |
ξ |
k |
|
+ |
b |
|
η |
k |
− |
a |
|
|
ξ |
2 |
− |
b |
η |
|
+ |
|
l |
2 |
;......p = |
1 |
2 |
|
||||||||||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
k 2 |
|
|
|
k 2 |
|
|
k |
2 2 |
|
|
|
k |
|
|
|
|
|
|
|||||||||||||
|
|
…………………………………………………….. |
(16.200) |
|||||||||||||||||||||||||||||||||||||||||||
|
|
ν |
|
= |
− δ z |
|
+ |
a |
|
ξ |
|
|
+ |
b |
|
η |
|
− |
a |
|
ξ |
|
− |
b |
η |
|
+ |
|
l |
|
;......p = |
|
1 |
2 |
|
|||||||||||
|
|
|
kn |
|
|
|
k |
|
|
|
|
kn |
|
|
k |
|
|
|
kn |
|
k |
|
|
kn |
|
n |
|
kn |
n |
|
|
|
kn |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Тогда можно записать, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
;......p = 1 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
ν |
|
= |
a |
|
ξ |
|
|
|
+ b η |
|
|
− a |
|
ξ |
|
|
− |
b η |
+ l |
|
|
2 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
k1 |
|
|
k |
1 k |
|
|
|
|
k1 k |
|
|
k1 1 |
|
|
|
k1 1 |
|
|
k1 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
ν |
k 2 |
= a |
ξ |
k |
+ |
|
b η |
k |
− |
|
a |
ξ |
2 |
|
− |
b η |
+ |
l |
k 2 |
;......p = 1 |
2 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
k 2 |
|
|
|
|
|
|
k 2 |
|
|
|
k 2 |
|
|
|
|
|
k 2 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
…………………………………………………….. |
(16.201) |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
ν |
|
|
= a ξ |
|
|
+ |
|
b η |
|
|
− |
|
a ξ |
|
− |
b η |
|
+ |
l |
|
;......p = 1 |
2 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
kn |
|
|
kn |
|
k |
|
|
|
|
|
|
kn |
k |
|
|
|
|
kn |
|
n |
|
|
|
|
kn |
n |
|
kn |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ν |
å (k ) |
= [a]ξ |
|
|
+ [b]η |
|
|
- |
(a |
|
ξ |
+ |
|
b η |
|
+ |
...+ a |
ξ |
|
+ |
b η |
|
|
) + [l];.....p = - 1 |
2n |
|||||||||||||||||||||
|
|
|
k |
|
|
|
k |
|
|
|
|
|
k1 1 |
|
|
|
k1 1 |
|
|
|
|
|
|
kn n |
|
|
|
|
kn n |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Поскольку на данном пункте должно выполняться условие (16.199), то последнее уравнение в системе уравнений (16.201) будет иметь вид
ν |
å (k ) |
= [a]ξ |
k |
+ [b]η |
k |
- (a |
ξ |
+ b η |
+ ...+ a |
kn |
ξ |
n |
+ b η |
);.....p = - |
1 |
2n |
(16.202) |
|
|
|
|
k1 1 |
k1 1 |
|
|
kn n |
|
|
Правило 2.
Если в заданном ряду параметрических уравнений поправок имеются уравнения, различающиеся только свободными членами, то их можно заменить на одно уравнение.
Пусть
|
ν 1 = ax + by + l1 ;..... |
p1 |
|
|
|
ν 2 = ax + by + l2 ;..... |
p2 |
|
|
|
…………………… |
(16.203) |
||
|
ν n = ax + by + ln ;..... pn |
|
||
Тогда суммарное уравнение поправок будет иметь вид |
|
|||
ν ′ = ax + by + |
l1 p1 + l2 p2 |
+ ... + ln pn ;...... p′ = p1 + p2 + ... + pn |
(16.204) |
|
|
p1 + p2 |
+ ... + pn |
|
|
Правило 3. Приведение весов уравнений к весу, равному единице. |
||||
Это правило значительно упрощает дальнейшую вычислительную обработку.
Для приведения уравнения к весу, равному единице, необходимо умно-
жить его коэффициенты и свободные члены на |
р . Если вес отрицатель- |
|||||
ный, то тоже умножают на |
|
р |
|
, а вес уравнения принимают равным |
||
|
|
|||||
|
|
|||||
«минус единице»: р=-1. |
|
|
|
|
|
|
Предположим, что имеются уравнения поправок |
|
|||||
ν 1 |
= a1 x + b1 y + l1 ;..... p1 |
(16.205) |
||||
ν 2 |
= a2 x + b2 y + l2 ;..... − |
p2 |
||||
В этом случае приведенные уравнения поправок (с весом, равным единице) имеют вид
ν 1 |
= |
|
|
р1 |
a1 x + |
|
р1 |
b1 y + |
р1 |
l1 ;..... р1 |
= 1 |
|
|||||
|
|
|
|
|
|
|
|
b2 y + |
|
|
|
l2 ;..... |
р2 = −1 |
(16.206) |
|||
ν 2 |
= |
|
|
р2 |
|
a2 x + |
|
р2 |
|
|
р2 |
||||||
472
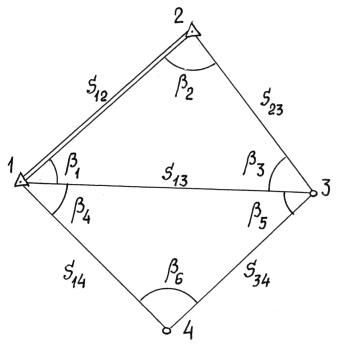
Рассмотрим принцип составления уравнений поправок для схемы триангуляции (рис. 16.14), состоящей из двух треугольников (10 направлений). Пункты 1 и 2 – исходные, пункты 3 и 4 – определяемые.
Рис. 16.14. Схема триангуляции
Составим уравнения поправок отдельно для каждого пункта, принимая, что погрешности исходных данных равны нулю: используются формулы (16.143) и (16.147).
Пункт 1 (исходный).
1. ν 12 = − δ z1 + l12
2. ν 13 = − δ z1 − a13ξ 3 − b13η 3 + l13
3. ν 14 = − δ z1 − a14ξ 4 − b14η 4 + l14
Пункт 2 (исходный).
4. ν 21 = − δ z2 + l21
(16.207)
5. ν 23 |
= − δ z2 |
− a23ξ 3 − b23η 3 + l23 |
|||
Пункт 3 (определяемый). |
|||||
6. ν 31 |
= − δ z3 |
+ a31ξ 3 |
+ b31η 3 |
+ l31 |
|
7. ν 32 |
= |
− δ z3 |
+ a32ξ 3 |
+ b32η 3 |
+ l32 |
8. ν 34 |
= |
− δ z3 |
+ a34 ξ 3 + b34η 3 − a34 ξ 4 − b34η 4 + l34 |
||
Пункт 4 (определяемый).
9. ν 41 = − δ z4 + a41ξ 4 + b41η 4 + l41
10. ν 43 = − δ z4 + a43ξ 4 + b43η 4 − a43ξ 3 − b43η 3 + l43
Применим для уравнений (16.) 1-е правило Шрейбера, т.е. исключим неизвестное δzi , принимая во внимание условие (16.). Получим:
- пункт 1(исходный):
1.ν 12 = l12 ;...... p = 0,5
2.ν 13 = − a13ξ 3 − b13η 3 + l13 ;..... p = 0,5
473

3. |
ν 14 |
|
= |
− a14ξ 4 |
− b14η 4 |
+ l14 ;..... p = 0,5 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||||||||||
4. |
ν |
å |
|
(1) |
= - a |
ξ |
3 |
- b η |
3 |
- |
a |
ξ |
4 |
- |
b η |
4 |
;.....p = |
- |
|
6 |
|
|
|
|
|
|
|
|||||||
|
|
|
13 |
|
13 |
|
|
14 |
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
- пункт 2 (исходный): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. ν 21 = l21 ;..... p = 0,5 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
6. |
ν 23 |
= − a23ξ 3 |
− b23η 3 |
+ l23 ;..... p = 0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
(16.208) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
7. |
ν å (2) |
|
= - a23 ξ 3 |
- b23η 3 |
+ l23 ;..... p = - 0,25 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
- пункт 3 (определяемый): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
8. |
ν 31 |
= a31ξ 3 |
+ b31η 3 |
+ l31 ;..... p = 0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
9. |
ν 32 |
|
= a32 ξ 3 |
+ b32η 3 |
+ l32 ;..... p = 0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
10. ν 34 = a34 ξ 3 + b34η 3 |
− a34 ξ 4 |
− b34η 4 |
+ l34 ;..... p = 0,5 |
|
|
|
|
|
1 |
|
||||||||||||||||||||||||
11. |
ν |
å (3) |
= (a |
31 |
+ |
a |
32 |
+ |
a |
34 |
)ξ |
3 |
+ |
(b |
|
+ b |
|
+ b )η |
3 |
- |
a |
ξ |
- b η |
4 |
;.....p = |
- |
6 |
|||||||
|
|
|
|
|
|
|
|
|
31 |
|
32 |
34 |
|
|
34 |
4 |
34 |
|
|
|
||||||||||||||
- пункт 4 (определяемый):
12.ν 41 = a41ξ 4 + b41η 4 + l41 ;..... p = 0,5
13.ν 43 = a43ξ 4 + b43η 4 − a43ξ 3 − b43η 3 + l43 ;..... p = 0,5
14.ν å (4) = (a41 + a43 )ξ 4 + (b41 + b43 )η 4 - a43 ξ 3 - b43η 3 ;..... p = - 0,25
Уравнения 1 и 5 в системе уравнений (16.208) можно исключить, поскольку приведенные поправки являются известными. Кроме того, следует иметь в виду, что при преобразованиях изменяются значения поправок. В связи с этим нами условно приняты такие же обозначения в формулах (16.208), как и в формулах (16.207).
Далее сгруппируем уравнения для взаимообратных направлений и применим к ним 2-е правило Шрейбера. Примем также во внимание, что аik = - aki и bik = bki . Для удобства выполним такие преобразования, чтобы в общих формулах коэффициенты были положительными.
Направление 1-3(3-1):
1. |
ν (13 )( 31 ) |
= a31ξ 3 |
+ b31η 3 + l(13 )( 31 ) ;..... |
p = 1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Направление 1-4(4-1): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2. |
ν (14 )( 41) |
= a41ξ 4 |
+ b41η 4 + l(14 )( 41) ;..... |
p = 1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Направление 2-3(3-2): |
|
|
|
|
|
|
|
|
3. ν (23 )( 32 ) |
= a32 ξ 3 |
+ b32η 3 + l(32 )( 23 ) ;..... p = 1 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Направление 3-4(4-3): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16.209) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
4. |
ν (34 )( 43 ) |
= a34 ξ 3 |
+ b34η 3 |
+ a43 ξ 4 |
+ b43η 4 |
+ l(34 )( 43 ) ;..... p = 1 |
|
|
|
|
||||||||||||||||||||
Остальные уравнения – уравнения сумм в системе (16.208): |
|
|
||||||||||||||||||||||||||||
5. |
ν |
å (1) |
= |
- a |
ξ |
- b η |
3 |
- |
a |
ξ |
4 |
- |
b η |
4 |
;.....p = |
- |
1 |
6 |
|
|
|
|
|
|
||||||
|
|
|
13 3 |
|
13 |
|
|
14 |
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
6. |
ν å (2) |
= - a23 ξ 3 |
- b23η 3 + l23 ;..... |
p = - 0,25 |
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||||||||
7. |
ν |
å (3) |
= |
(a |
31 |
+ a |
32 |
+ a |
34 |
)ξ |
3 |
+ |
(b |
|
+ b |
+ |
b )η |
3 |
- |
a |
|
ξ |
4 |
- b η |
4 |
;.....p = - |
6 |
|||
|
|
|
|
|
|
|
|
31 |
32 |
|
|
34 |
|
34 |
|
34 |
|
|
||||||||||||
8. |
ν å (4) |
= (a41 |
+ a43 )ξ 4 |
+ (b41 |
+ b43 )η 4 |
- a43 ξ 3 |
- b43η 3 ;..... p = - 0,25 |
|
|
|||||||||||||||||||||
474
Обратим внимание но то, что в системе (16.209) уравнения 3 и 6 можно объединить, используя 2-е правило Шрейбера. Т.е. вместо указанных уравнений записать объединенное -
ν (23)(32 )− å (2) = a32ξ 3 + b32η 3 + |
l(32 )( 23) |
;...... p = |
0,75 |
(16.210) |
p(3) + p(6) |
После составления уравнений поправок в них подставляют вычисленные ранее коэффициенты и свободные члены, для упрощения вычислений все уравнения приводят к весу, равному ±1 (3-е правило) решают уравнения по установленным правилам и вычисляют поправки к предварительным координатам определяемых пунктов ( в рассматриваемом случае – к координатам пунктов 3 и 4).
Все вычисления, связанные с определением уравненных значений результатов измерений и контрольные вычисления выполняются по правилам, изложенным в § 154.
Далее в примере рассмотрено уравнивание направлений в сети триангуляции, состоящей из двух треугольников, в одном из которых имеется базисная (исходная) сторона, определяемая пунктами 1 и 2 (рис. 16.14).
|
|
|
|
Таблица 16.53 |
Пункт |
Направления |
Значение |
Угол β |
Значение угла |
|
|
направления, Mki |
β 1 |
|
1 |
1 – 2 |
0о 00' 00,0" |
60о 30' 33,6" |
|
1 – 3 |
60 о 30' 33,6" |
β 2 |
74 о 50' 09,9" |
|
|
1 – 4 |
129 о 14' 00,1" |
β 3 |
44 о 39' 17,7" |
2 |
2 – 3 |
0о 00' 00,0" |
å β (1) |
180 о 00' 01,2" |
|
2 – 1 |
74 о 50' 09,9" |
W(1) |
+1,2" |
3 |
3 – 4 |
0о 00' 00,0" |
β 4 |
68 о 43' 26,5" |
3 – 1 |
60 о 58' 03,6" |
β 5 |
60 о 58' 03,6" |
|
|
3 – 2 |
105 о 37' 21,3" |
β 6 |
50 о 18' 27,5" |
4 |
4 – 1 |
0о 00' 00,0" |
å β (2) |
179 о 59' 57,6" |
|
4 - 3 |
50 о 18' 27,5" |
W(2) |
-2,4" |
Координаты пунктов 1 и 2:
Х1 = 5364,756 м; Y1 = 4256,214 м; Х2 = 8836,421 м; Y2 = 5748,265 м.
Исходный дирекционный угол α12 = 23о15'25,38", длина исходной стороны (базиса) S12 = 3778,7133 м (из решения обратной геодезической задачи).
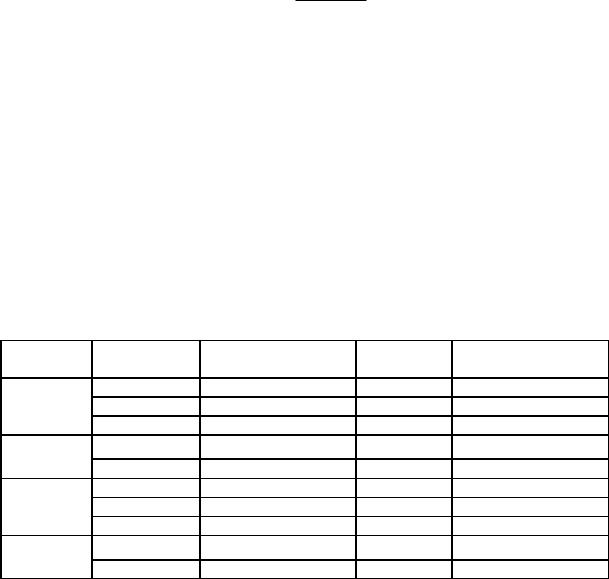
В данном геодезическом построении измерены направления в каждом из пунктов (всего 10 направлений) и вычислены углы βi (табл. 16.53).
Все вычисления в примерах будем выполнять на порядок выше, а округлять затем только уравненные величины.
Предварительно выполним следующую обработку в схеме триангуляции: по теореме синусов найдем стороны S23, S14 и S43; вычислим дирекционные углы направлений 2-3, 1-4 и 4-3 через известный дирекционный угол направления 1-2 и вычисленные значения углов: определим предварительные координаты точек 3 и 4 по ходу 1-2-3-4-1-2 и выполним предварительное уравнивание координат (табл. 16.54); по полученным данным из решения
475
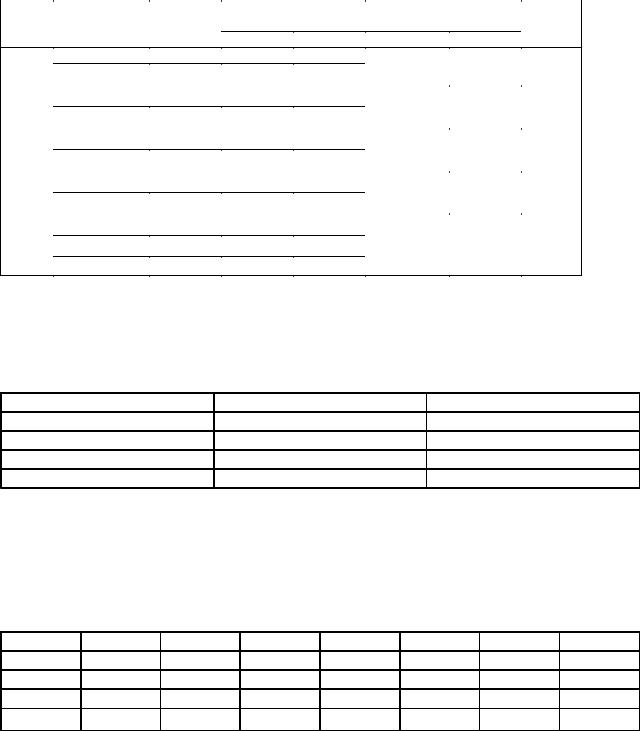
обратной геодезической задачи найдем дирекционные углы определяемых сторон сети.
S23 = |
S12 |
sin β 1 |
= 4679 ,799 м;..S14 |
= S12 |
sin β 2 sin β 5 |
= 5896 ,343 м;...S34 = |
S14 |
|
sin β 4 |
= |
6284 ,090 м. |
|||||||||||
|
sin β 3 sin β 6 |
|
||||||||||||||||||||
|
|
|
sin β 3 |
|
|
|
|
|
|
|
|
|
|
sin β 5 |
|
|||||||
α 23 = α 21 − β 2 = |
128 |
0 25′15,5′′;.. |
= α 12 + β 1 + β 4 = |
152 0 29′25,5′′;.. |
41 + β 6 = |
220 |
47′53,0′′. |
|||||||||||||||
|
|
α 14 |
|
|
α 43 = α |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 16.54 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
№№ |
|
Дирекц.углы |
|
Рассто- |
|
Приращения |
|
Координаты, м |
|
|
|
№№ |
|
|
|
|
||||||
точек |
|
|
α |
|
|
яния |
|
координат, м |
|
|
|
|
|
точек |
|
|
|
|
||||
|
|
|
|
|
|
|
s , м |
|
Δх |
Δу |
|
Х |
Y |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23°15'25,4" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
8836,421 |
5748,265 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
128°25'15,5" |
|
4679,799 |
-2908,189 |
+3666,464 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3 |
|
|
|
|
|
|
|
|
5928,232 |
9414,729 |
|
|
3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
202°47'53,0" |
|
6284,090 |
-5793,154 |
-2434,986 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4 |
|
|
|
|
|
|
|
|
135,078 |
6979,743 |
|
|
4 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
332°29'25,5" |
|
5896,343 |
+5229,665 |
-2723,503 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
5364,743 |
4256,240 |
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
5364,756 |
4256,214 |
|
|
1(исх) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пользуясь табл. 16.54, вычислим по формулам (16.194) значения коэффициентов уравнений поправок (табл. 16.55).
|
|
Таблица 16.55 |
Направление |
a |
b |
1-3 |
+3,951 |
-0,432 |
2-3 |
+3,453 |
+2,739 |
3-4 |
-1,272 |
+3,026 |
1-4 |
+1,616 |
+3,103 |
Вычислим по формуле (16.196) значения ориентирующих углов в пунктах:
δ z1 = |
23015′25,29′′;...δ z2 = 128 0 25′15,75′′;...δ z3 = |
202 0 47′54,56′′;...δ z4 = |
332 0 29′26,02′′ |
||||
Значения свободных членов находим по формуле (16.195) – табл. 16.56. |
|||||||
|
|
|
|
|
|
Таблица 16.56 |
|
Пункт 1 |
l |
Пункт 2 |
l |
Пункт 3 |
l |
Пункт 4 |
l |
1-2 |
+0,09 |
2-1 |
-0,27 |
3-1 |
+0,45 |
4-1 |
-0,43 |
1-3 |
-0,28 |
2-3 |
+0,27 |
3-2 |
+0,16 |
4-3 |
+0,42 |
1-4 |
+0,20 |
|
|
3-4 |
-0,62 |
|
|
å l |
+0,01 |
|
0 |
|
-0,01 |
|
-0,01 |
Незначительные отступления от условия (16.199) объясняются погрешностями округлений.
476
После подстановки значений коэффициентов a и b и свободных членов l в уравнения (16.209) с учетом преобразований значений свободных членов при объединениях уравнений по правилам Шрейбера получим:
1. |
− 3,951ξ 3 + 0,432η 3 + 0,085 ;..... p = 1 |
|
|
|
|
2. |
− 1,616 ξ 4 − 3,103η 4 − 0,115 ;..... p = 1 |
|
|
|
|
3. |
− 3,453 ξ 3 − 2,739 η 3 + 0,215 ;..... p = 1 |
|
|
|
|
|
4. − 1,272 ξ 3 + 3,026η 3 + 1,272 ξ 4 − 3,026η 4 − 0,100 ;..... p = 1 |
||||
|
|
|
|
1 |
(16.210) |
5. |
− 3,951ξ 3 + 0,432η 3 − 1,616ξ 4 |
− 3,103η 4 ;.....p = |
− |
6 |
|
6. |
− 3,453 ξ 3 − 2,739 η 3 ;..... p = − 0,25 |
|
|
||
|
1 |
|
|||
7. |
− 8,676ξ 3 + 0,719η 3 + 1,272ξ 4 |
− 3,026η 4 ;.....p = |
− |
6 |
|
8. |
|
|
|
|
|
− 0,344 ξ 3 − 6,129η 3 − 1,272 ξ 4 |
+ 3,026η 4 ;..... p = − 0,25 |
||||
Приведем уравнения 5, 6, 7 и 8 системы (16.210) к весам, равным «минус |
|||||
единице». Для этого умножим коэффициенты и свободные члены этих уравнений на 

 р . Получим
р . Получим
1. |
− 3,951ξ 3 |
+ 0,432 |
η 3 + 0,085 ;..... p = 1 |
|
2. |
− 1,616 ξ 4 − 3,103η 4 − 0,115 ;..... p = 1 |
|||
3. |
− 3,453 ξ 3 − 2,739 η 3 + 0,215 ;..... p = 1 |
|||
|
|
|
4. − 1,272 ξ 3 + 3,026η 3 + 1,272 ξ 4 − 3,026η 4 − 0,100 ;..... p = 1 |
|
5. |
|
|
|
(16.211) |
− 1,613 ξ 3 + 0,176η 3 − 0,660 ξ 4 |
− 1,267 η 4 ;..... p = − 1 |
|||
6. |
− 1,727 ξ 3 − 1,370 |
η 3 ;..... p = − 1 |
||
7. |
− 3,542 ξ 3 |
+ 0,294 |
η 3 + 0,519 ξ 4 |
− 1,235η 4 ;..... p = − 1 |
8. |
− 0,172 ξ 3 |
− 3,065η 3 − 0,636 ξ 4 |
+ 1,513η 4 ;..... p = − 1 |
|
Составим по уравнениям (16.211) матрицу коэффициентов, свободных членов и весов для получения нормальных уравнений поправок (табл. 16.57).
|
|
|
|
|
|
Таблица 16.57 |
|
1(ξ3) |
2(η3) |
3(ξ4) |
4(η4) |
l |
p |
1 |
-3,951 |
0,432 |
|
|
0,085 |
1 |
2 |
|
|
-1,616 |
-3,103 |
-0,115 |
1 |
3 |
-3,453 |
-2,739 |
|
|
0,215 |
1 |
4 |
-1,272 |
3,026 |
1,272 |
-3,026 |
-0,100 |
1 |
5 |
-1,613 |
0,176 |
-0,660 |
-1,267 |
0 |
-1 |
6 |
-1,727 |
-1,370 |
|
|
0 |
-1 |
7 |
-3,542 |
0,294 |
0,519 |
-1,235 |
0 |
-1 |
8 |
-0,172 |
-3,065 |
-0,636 |
1,513 |
0 |
-1 |
В соответствии с правилами составления нормальных уравнений получим:
1. 10,992 ξ 3 + 2,334η 3 − 0,954 ξ 4 − 2,309η 4 − 0,959 = 0 2. 2,334 ξ 3 + 5,457η 3 + 1,863ξ 4 − 3,933η 4 − 0,867 = 0
477