

Лабораторная_1
.pdf31
где h – расстояние, проходимое грузом за время t. В условиях задачи h – постоянная величина. При другом радиусе шкива r меняется момент силы и ускорение, а их отношение (если положение грузов на стержнях в течение опытане меняется) остаётся постоянным
|
M |
10 |
|
M |
20 |
|
2 |
gt2 |
|
2 |
gt2 |
|
(5) |
||
I0 = |
|
= |
|
= m2 R |
|
|
1 |
−1 = m2r |
|
|
2 |
−1 |
|||
|
|
|
|
|
|
|
|
||||||||
|
ε1 |
|
ε2 |
|
|
|
2n |
|
|
|
2n |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||
рис. 1
Наоборот, при одном и том же моменте сил, но различных положениях грузов m1, на стержнях отношение момента сил к угловому ускорению меняется, поскольку меняется момент инерции маятника
М0 |
= I10 ≠ I20 = |
M0 |
, |
(6) |
||
ε |
1 |
|
ε |
2 |
|
|
|
|
|
|
|
||
Момент инерции маятника при удалении грузов m1 от центра на расстояние l1 (l1 – расстояние от оси вращения до центра масс груза m1) согласно теореме
32
Штейнера равен
I1 |
= I0 |
+ 4m1l1 , |
(7) |
|
|
2 |
|
где I0 – сумма моментов инерции маятника без грузов и грузов относительно оси, проходящей через их центры масс.
I2 = I0 + 4m1l22 , |
(8) |
откуда
I1 − I2 = 4m1 (l12 −l22 ) . |
(9) |
Из уравнений (5) и (9) получается проверяемая экспериментально закономерность
t12 −t'12 = 8h |
m |
|
l 2 |
−l |
2 |
. |
(10) |
1 |
|
1 |
2 |
||||
m2 |
|
|
|
||||
|
|
R2 g |
|
|
|
||
Порядок выполнения работы
1.Записывают данные по массам m1 и m2 , приведённые на установке.
2.Измеряют максимально допустимую высоту h от нижней плоскости груза m2 до верхней плоскости приёмного столика.
3.Закрепляют грузы в крайнем положении и измеряют линейкой двойное
расстояние до грузов 2L1 , в их крайнем положении (рис. 1) и штангенциркулем диаметр упора 2L2 и длину b груза, m1. Для работы 4а минимально возможное расстояние между грузами 2L2. Далее расстояние до центра масс грузов в крайних положениях определяют по формулам:
l1 |
= |
2L1 +b |
, |
l2 |
= |
2L2 +b |
|
2 |
2 |
||||||
|
|
|
|
|
4.Устанавливают грузы m1 в нужное положение (расстояния 2L1 и 2L2).
5.Поднимают груз m2 в верхнее положение и включают кнопку “сеть”. Отжимают кнопку “пуск”, и электромагнит фиксирует положение шкива, а следовательно, и грузов.
6.Нажимают кнопку “пуск”. Груз m2 движется вниз до упора, секундомер фиксирует время движения. Записывают показания секундомера.
7.Нажимают кнопку “сброс”. Поднимают груз m2 в верхнее положение и повторяют пункты 4-7 пять раз.
ПРИМЕЧАНИЯ:
1.Массы грузов даны на установке.
2.Все винты крепления грузов m1 необходимо установить в одно плоскости.
33
3.Каждый раз надо стараться устанавливать груз m2 в верхнее положение на одном и том же уровне.
4.Минимальное расстояние 2L2 порядка 14 см.
5.Перевешивают нить на шкив малого радиуса r и повторяют серию измерений.
6.Грузы переводят на минимальное расстояние и повторяют две предыдущие серии измерений для радиусов шкивов R и r.
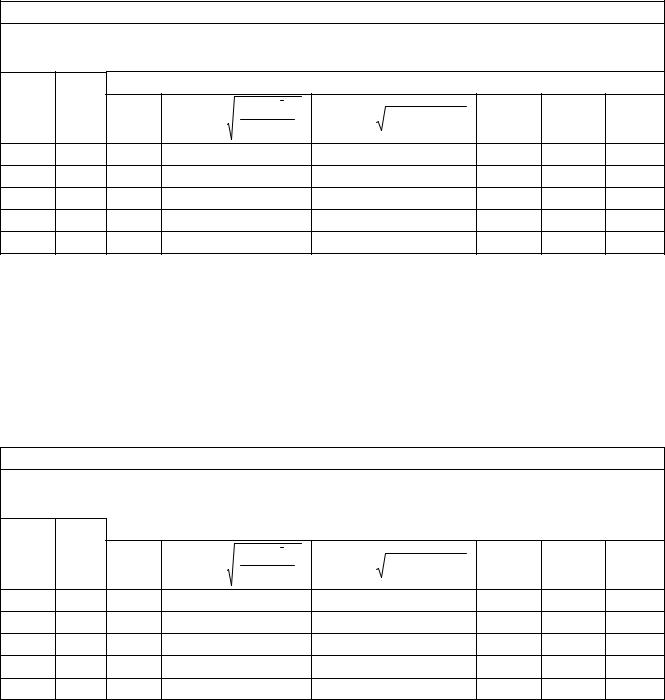
7.Данные измерений с учётом приборных погрешностей заносят в таблицу:
m1 = |
m2 = |
R = |
r = |
|
h = |
|
||||
2L = |
2L |
|
= |
b = |
l1 = |
2L1 +b |
|
l2 = |
2L2 +b |
|
2 |
|
|
||||||||
|
|
|
||||||||
1 |
|
|
|
2 |
2 |
|
||||
|
|
|
|
|
|
|||||
№ |
|
|
t |
tср |
|
I |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
l1 |
|
|
3 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R |
|
||
4 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
l1 |
|
|
3 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
r |
|
||
4 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
l2 |
|
|
3 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R |
|
||
4 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
l2 |
|
|
3 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
r |
|
||
4 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
Полученные данные позволяют произвести расчёты и убедиться (в пределах ошибок измерений) в справедливости соотношений (5) и (10).
Контрольные вопросы
1.В чем состоит основное уравнение динамики вращательного движения? Какому закону при поступательном движении оно аналогично?
2.Что такое момент инерции твёрдого тела и от чего зависит его величина? Какому параметру поступательного движения он аналогичен?
3.Куда направлены векторы момента силы, угловой скорости и углового
34
ускорения?
4.В чем вы убедились, обработав результаты измерений?
5.Какой закон и как проверяется в этой работе?
6.Какие моменты инерции связывает теорема Штейнера?
7.Какая из ошибок измерений сильнее всего сказалась на погрешности окончательного результата?
35
РАБОТА 5 а ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ ПРИ
ДВИЖЕНИИ ТЕЛА В ПОЛЕ СИЛ ТЯЖЕСТИ
Приборы и принадлежности: машина Атвуда, набор перегрузков. Введение. При поступательном движении тела скорость определяется
выражением:
V (t) = ∫t |
a(t)dt +V (0) |
(1) |
0 |
|
|
с соответствующими начальными условиями (при t=0 Vt=0), а длина вектора перемещения:
t |
|
S(t) = ∫V (t)dt . |
(2) |
0 |
|
В случае равноускоренного движения при нулевой начальной скорости a(t) = const , и из (1) и (2) получаются известные зависимости от времени пути и скорости равноускоренного движения:
V = at , |
S = at2 |
(3) |
|
2 |
|
откуда скорость в конечной точке движения |
|
|
V0 |
= 2aS |
(4) |
При равномерном движении со скоростью Vо из (2) получаем: |
|
|
S =V0t |
(5) |
|
Если тело двигалось на участке S1 ускоренно, а на участке S2 равномерно с начальной скоростью Vo , набранной на участке S1, (рис. 1), то, зная длину участков S1 и S2 и время t движения тела на участке S2 равномерного движения,
можно определить ускорение движения на участке S1: S2 = |
2aS1 t , откуда |
|||
a = |
S22 |
, |
(6) |
|
2S1t 2 |
||||
|
|
|
||
Описание установки и метода измерений
Общий вид и конструкцию прибора Атвуда можно описать следующим образом. Через лёгкий ролик, вращающийся с минимальным трением,
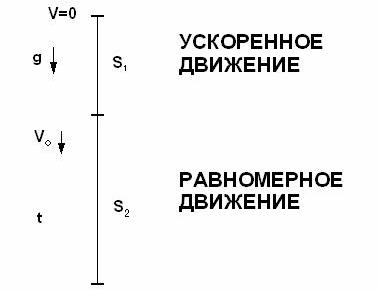
36
переброшена нить с двумя одинаковыми грузиками массы М каждый. На правый груз М кладётся перегрузок массы m, и система начинает двигаться ускоренно:
mg = (2M + m)a |
(7) |
с ускорением
a = |
mg |
(8) |
|
2M + m |
|||
|
|
рис. 1
Когда груз М, ускорившись на участке S1, проходит через съёмное кольцо, то перегрузок m большего диаметра остаётся на кольце. Далее, при равновесии сил, действующих на грузы М, переброшенные через блок, продолжается их уже равномерное движение. Время движения регистрируется фотоэлектрическими датчиками на участке движения S2. С учётом формул (6) и
(8) ускорение свободного падения
g = |
2M + m |
|
S22 |
(9) |
|
m |
2S1t 2 |
||||
|
|
|
можно определить, измерив пути равноускоренного S1, и равномерного движения S2, зная массы М грузов и m перегрузков, и определив время движения t по показаниям секундомера.
На лицевой панели секундомера размещены: выключатель сети, выключатель «сброс», осуществляющий установку нуля измерителя, и выключатель «пуск», освобождающий от блокировки электромагнитом оси вращения ролика, и тем самым начинающий движение грузов с перегрузками. Ножкипозволяют произвести выравнивание прибора.
Порядок выполнения работы
1. С помощью регулировочных ножек установить прибор вертикально, так, чтобы груз М свободно проходил через кольцо и датчики.
37
2.Измерить длину S1 пути участка равноускоренного движения и S2 участка равномерного движения по миллиметровой шкале на колонке установки (для облегчения определения длин путей все кронштейны имеют маркировочные линии – указатели положения).
3.Подключить прибор в сеть и нажать клавишу «сеть».
4.Нажать клавишу «сброс».
5.Переместить правый грузчик в верхнее положение и отжать клавишу «пуск» (при этом электромагнит заблокирует ось ролика).
6.На правый груз массы М положить первый перегрузок массы (массы
грузов М и перегрузков m1, m2, m3 с погрешностями измерений, указанными на установке).
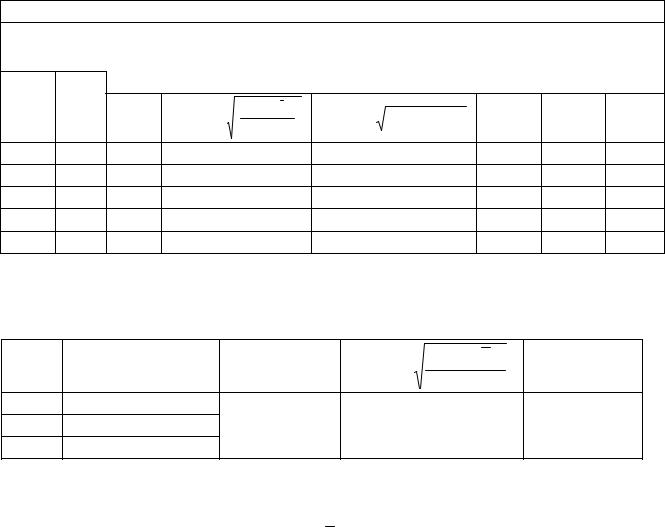
Таблица 1. Перегрузок массы m1
|
|
|
|
|
|
|
Измерения |
|
|
|
|
|
|
|
|
|
M = |
|
M = |
|
m1 = |
|
m1 = |
|
|
S1 = |
|
S1 = |
|
||||
tприб = |
|
|
|
|
|
|
|
|
|
S2 |
|
= |
|
S2 |
= |
|
№ |
ti |
Расчёты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tср |
tсл = |
|
∑(ti −t)2 |
|
t = ( |
t |
2 |
+ |
t |
2 |
) |
gi ср |
gi |
Eg |
||
|
|
|
5 4 |
|
пр |
сл |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.Установить нижнюю грань правого грузика на уровне черты, нанесённой на верхнем кронштейне.
8.Нажать клавишу «пуск» и по окончании движения грузов снять показания секундомера. Измерения времени повторить 5 раз, данные занести в таблицу 1.
9.Провести измерения по пунктам 1 – 8 при другой массе перегрузка m2 , данные занести в таблицу 2.
Таблица 2. Перегрузок массы m2 |
|
Измерения |
|
|
|
|
|
|
|
|
|
|
|
|||||
M = |
|
M = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2= |
|
m2= |
|
|
S1 = |
|
|
|
S1 = |
|
||||||
tприб = |
|
|
|
|
|
|
|
|
|
S2 |
= |
|
|
|
S2 |
= |
|
|
№ |
ti |
Расчёты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tср |
tсл = |
|
∑(ti −t)2 |
|
t = ( |
t |
2 |
|
+ |
|
t |
2 |
) |
gi ср |
gi |
Eg |
||
|
|
|
5 4 |
|
пр |
|
сл |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
38 |
|
|
|
|
|
|
|
|
|
10.Провести измерения по пунктам 1 – 8 при третьей массе перегрузка m3 и |
||||||||||||||||
других длинам S1 и S2; данные занести в таблицу 3. |
|
|
|
|
|
|
|
|||||||||
Таблица 3. Перегрузок массы m3 |
|
Измерения |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M = |
|
M = |
|
m3= |
|
m3= |
|
|
S1 = |
|
|
S1 = |
|
|||
tприб = |
|
|
|
|
|
|
|
|
|
S2 = |
|
|
S2 |
= |
|
|
№ |
ti |
Расчёты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tср |
tсл = |
|
∑(ti −t)2 |
|
t = ( |
t |
2 |
|
+ t |
2 |
) |
gi ср |
gi |
Eg |
||
|
|
|
5 4 |
|
пр |
сл |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончательные результаты расчётов занести в таблицу 4. |
|
|
|
|||||||||||||
Таблица 4.
№ |
gi |
|
= |
∑gi |
|
∑(gi − g)2 |
Eg = |
g |
|
g |
g = |
||||||||
3 |
g |
||||||||
|
|
|
|
|
3 2 |
|
1
2
3
и представить итог выполнения лабораторной работы в виде:
g = g ± g
Контрольные вопросы
1.Какой вид имеет общая связь между кинематическими переменными при поступательном движении.
2.Каков характер движения грузов на различных участках движения и как он осуществляется?
3.От чего зависит ускорение грузов в системе?
4.Может ли ускорение грузов в системе превысить g?
5.Как зависит регистрируемое время движения грузов от длины участка S1?
6.Как зависит регистрируемое время движения грузов от соотношения масс груза и перегрузка?
7.Какова величина погрешности измерения ускорения свободного падения по данным Ваших измерений? Какова ее основная причина?

39
РАБОТА 5 б ЗАВИСИМОСТЬ УСКОРЕНИЯОТ ВЕЛИЧИНЫ ДЕЙСТВУЮЩЕЙ НА
ТЕЛО СИЛЫ
Приборы и принадлежности: машина Атвуда с секундомером, два разновеса.
Введение. Ускорение тела, согласно закону Ньютона, определяется суммой всех сил, приложенных к нему, и массой тела.
|
|
|
n r |
|
|
r |
|
∑Fi |
|
ar = |
dV |
= |
i=1 |
. |
|
dt |
|
m |
|
Описание установки и метода измерений. Изучение зависимости ускорения от величины действующей на тело силы производится на приборе, называемом машиной Атвуда. Прибор состоит из неподвижного лёгкого блока; через блок переброшена нить, к концам которой подвешены два груза примерно равной массы М и М+ М (груз массой. М – для компенсации трения в системе). На правый груз помещается перегрузок массы m, и система приходит в ускоренное движение. На рис. 1 изображены силы, действующие на каждый из грузов и блок.
Законы динамики для блока и грузов:
(Т2 |
−Т1 )R − M тр = I |
a |
|
R |
|
||
|
|
|
|
|
T1 − Mg = Ma |
(1) |
|
(M + M + m)g −T2 = (M + M + m)a
Здесь Мтр – тормозящий момент сил трения, действующий в оси блока; I = mд2R2
– момент инерции диска, R – радиус диска; Т1 и Т2 – силы натяжения нитей; а – ускорение грузов; а – угловое ускорение диска.
R
Поделив первое уравнение на R и складывая уравнения системы (1), получим:
Mg + mg − |
M тр |
|
|
m |
д |
|
|
|
|
= |
2M + M + |
|
+ m a |
||||
R |
2 |
|||||||
|
|
|
|
|
||||
Выбирая экспериментально разницу |
масс грузов |
М такой, чтобы |
||||||
скомпенсировать момент сил трения (т.е. Mg = MRтр ) получим выражение для

40
ускорения
|
|
|
a1 = |
|
mg |
|
|
= |
mg |
|
(2) |
|
|
|
|
|
mд |
|
M 0 + m |
||||
|
|
|
|
(2M + |
M + |
+ m) |
|
||||
|
|
|
|
2 |
|
|
|
||||
Здесь M 0 |
= 2M + M + |
mд |
– суммарная масса грузов и половина массы диска mд. |
|
|||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
рис. 1
При большем перегрузке (например, в 2 раза) ускорение грузов определится аналогичной формулой
a2 = |
2mg |
(3) |
|
M 0 + 2m |
|||
|
|
Отношение ускорений
a2 |
= 2 |
M0 + m |
= |
|
2 |
|
(4) |
a1 |
M0 + 2m |
|
m |
|
|||
|
1 + |
|
|
||||
|
M0 + m |
|
|
||||
|
|
|
|
|
|||