

4.2. Вопросы разработки моделей мехатронных систем
Использование компьютера позволяет по-новому распределить время, отводимое на теоретическое изучение материала и практические занятия. При этом под практическими занятиями подразумевается работа в виртуальных лабораториях.
Создание обучающих программ с применением современных компьютерных технологий для рассматриваемого курса наиболее полно реализуются в среде MATLAB-Simulink. При этом сами компьютерные технологии в названных пакетах можно поделить на несколько уровней:
Уровень, использующий рабочее пространство MATLAB и его расширений (Toolboxes).
Уровень, использующий структурные блоки пакета Simulink и его расширений (Blocksets).
Уровень, использующий виртуальные (маскированные) блоки пакета Sim Power System с графическим интерфейсом пользователя.
Уровень, использующий имитационные лабораторные стенды, разработанные с использованием графического интерфейса пользователя (GUI).
Ниже, на конкретных примерах, рассматриваются перечисленные уровни создания виртуальных лабораторий в среде MATIAB, Simulink.
Структурные модели строятся на основе математического описания динамических систем. Это описание может быть представлено дифференциальным уравнением, передаточной функцией, нулями и полюсами передаточной функции либо уравнениями пространства состояний. В пакете Simulink имеется полный набор блоков, позволяющих реализовать любую структурную модель.
Представление результатов моделирования структурных моделей часто осуществляется при использовании пакета расширения Control System, который в своем составе имеет инструментальное средство LTI-Viewer .
Операторное представление математического описания лесосушильной камеры запишется в виде:
 (1.1)
(1.1)
На рис. 1.2. приведена структурная модель замкнутой САР лесосушильной камеры, построенная по уравнению 1.1. и ее динамическая характеристика.
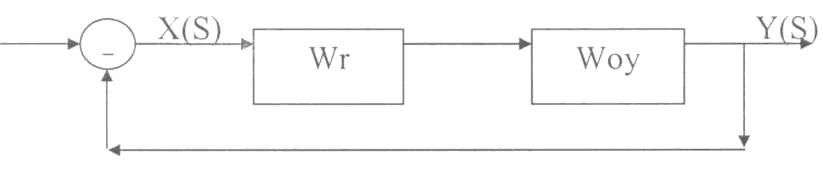

Рис. 4.2. Структурная модель лесосушильной камеры
и ее динамическая характеристика
Основой функциональной модели является логика работы лесосушильной камеры. Функциональные модели используются для моделирования элементов системы автоматического управления, при исследовании динамики систем, представленных структурными моделями.
5. Пакет Simulink – виртуальная среда проектирования мехатронных систем
5.1.Общие вопросы создания моделей в пакете Simulink
5.1.1. Обозреватель разделов библиотеки пакета Simulink
Библиотека Simulink представляет собой набор виртуальных блоков, используя которые можно исследовать любую мехатронную систему. Для всех блоков существует возможность настройки параметров. Параметры настройки отражаются в полях окна настройки выбранного блока. Кнопка Help в окне настройки открывает подробную информацию о блоке и его параметрах настройки.
Для запуска программы необходимо предварительно запустить пакет MATLAB (рис. 3.1).

Рис. 5.1. Основное окно программы Matlab
Запуск программы Simulink приводит к открытию окна обозревателя разделов библиотеки Simulink (рис.5.2).

Рис. 5.2. Окно обозревателя разделов библиотеки Simulink