

3.3. Стационарные характеристики смо
На основе полученных значений вероятностей пребывания системы в состояниях определяем показатели эффективности стационарного режима:
 –вероятность
того, что машина не работает;
–вероятность
того, что машина не работает; –вероятность
того, что машина занята рубкой;
–вероятность
того, что машина занята рубкой; –вероятность
того, что машина занята рубкой и одно
бревно ожидает в очереди;
–вероятность
того, что машина занята рубкой и одно
бревно ожидает в очереди; –вероятность
того, что машина занята рубкой и два
бревна ожидают в очереди.
–вероятность
того, что машина занята рубкой и два
бревна ожидают в очереди.
Рассмотрим другие показатели эффективности работы системы массового обслуживания.
Пусть
![]() – число машин, занятых рубкой. Это есть
случайная величина с возможными
значениями: 0, 1. Вероятности этих значений
соответственно равны
– число машин, занятых рубкой. Это есть
случайная величина с возможными
значениями: 0, 1. Вероятности этих значений
соответственно равны
![]() ,
,
![]() .
.
Тогда
среднее число машин, занятых рубкой,
есть математическое ожидание случайной
величины
![]() ,
которое равно
,
которое равно
![]() .
.
Следовательно, среднее число работающих машин равно 0,90.
Пусть
![]() – число машин, свободных от рубки. Это
есть случайная величина с возможными
значениями: 0, 1. Вероятности этих значений
соответственно равны
– число машин, свободных от рубки. Это
есть случайная величина с возможными
значениями: 0, 1. Вероятности этих значений
соответственно равны
![]() ,
,
![]() .
.
Тогда
среднее число машин, свободных от рубки,
есть математическое ожидание случайной
величины
![]() ,
которое равно
,
которое равно
![]() .
.
Следовательно, среднее число простаивающих машин равно 0,10. Общее число занятых и свободных от рубки машин равно
![]() .
.
Коэффициент загрузки машин равен отношению среднего числа загруженных машин к общему числу машин в цехе, т.е.
![]() .
.
Тогда
в процентах
![]() .
.
Коэффициент простоя машин равен отношению среднего числа машин, свободных от рубки, к общему числу машин в цехе, т.е.
![]() .
.
Тогда
в процентах
![]() .
.
Пусть
![]() – число бревен в очереди. Это есть
случайная величина с возможными
значениями: 0, 1,2. Вероятности этих
значений соответственно равны
– число бревен в очереди. Это есть
случайная величина с возможными
значениями: 0, 1,2. Вероятности этих
значений соответственно равны
![]() ,
,
![]() ,
,
![]() .
.
Тогда
среднее бревен в очереди есть математическое
ожидание случайной величины
![]() ,
которое равно
,
которое равно
![]() .
.
Таким образом, среднее число бревен, находящихся в очереди на рубку, равно 1,19, т.е. более одного бревна.
3.4.Математическая модель нестационарного режима
Обозначим
через
![]() вероятность пребывания системы в момент
времени
вероятность пребывания системы в момент
времени![]() в состоянии
в состоянии![]() ,
,![]() .
Это – переходные вероятности, изменяющиеся
со временем. Согласно правилу,
нестационарный режим описывается
следующей системой дифференциальных
уравнений, составленной по графу
состояний, изображенному на рис.4:
.
Это – переходные вероятности, изменяющиеся
со временем. Согласно правилу,
нестационарный режим описывается
следующей системой дифференциальных
уравнений, составленной по графу
состояний, изображенному на рис.4:
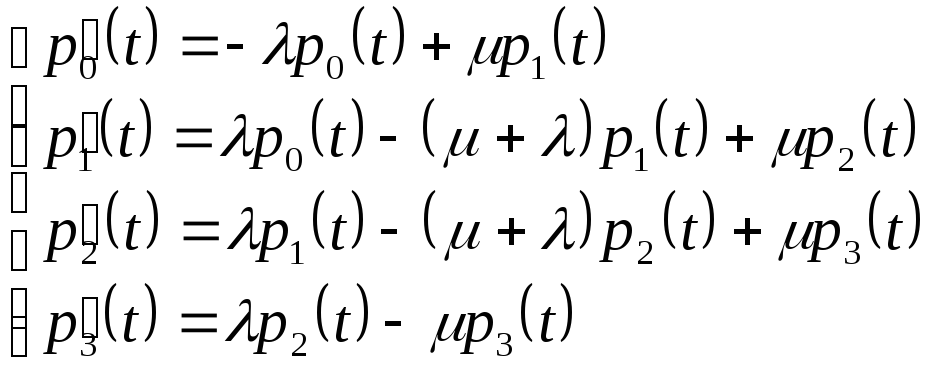 . (14)
. (14)
Решение этой системы должно удовлетворять начальному условию
![]() ,
,
![]() , (15)
, (15)
означающему,
что в момент времени
![]() система находится в состоянии
система находится в состоянии![]() :
бревен в цехе нет, рубительные машины
простаивают и очередь отсутствует.
Контролем правильности решения системы
является условие нормировки
:
бревен в цехе нет, рубительные машины
простаивают и очередь отсутствует.
Контролем правильности решения системы
является условие нормировки
![]() , (16)
, (16)
которое
означает, что для любого момента времени
сумма вероятностей постоянна и равна
![]() .
.
Решение задачи (14)-(15) получим в Excel на Листе 2 методом Эйлера, как показано в табл.6.
Таблица 6
|
|
A |
B |
C |
D |
E |
F |
G |
Н | |||||||
|
1 |
|
4,46 |
Решение системы дифференциальных уравнений | ||||||||||||
|
2 |
|
2,7 |
t |
|
|
|
|
| |||||||
|
3 |
h |
0,1 |
0 |
|
|
|
|
| |||||||
|
4 |
|
|
0,1 |
0,554 |
0,446 |
0 |
0 |
1 | |||||||
|
5 |
|
|
0,2 |
0,427336 |
0,373748 |
0,198916 |
0 |
1 | |||||||
|
6 |
|
|
0,3 |
0,337656104 |
0,350444 |
0,223183752 |
0,08871654 |
1 | |||||||
|
7 |
|
|
0,4 |
0,281681256 |
0,31038 |
0,243635499 |
0,16430302 |
1 | |||||||
|
8 |
|
|
0,5 |
0,239854075 |
0,279559 |
0,251983877 |
0,22860264 |
1 | |||||||
|
… |
|
|
… |
… |
… |
… |
… |
… | |||||||
|
79 |
|
|
7,6 |
0,101135415 |
0,167061 |
0,275959559 |
0,45584431 |
1 | |||||||
|
80 |
|
|
7,7 |
0,101135415 |
0,167061 |
0,275959559 |
0,45584431 |
1 | |||||||
В
ячейки B1
и B2
поместим значения интенсивностей
![]() и
и![]() .
В ячейкуB3
поместим значение шага интегрирования
.
В ячейкуB3
поместим значение шага интегрирования
![]() .
Примем
.
Примем![]() .
Блок ячеекC3
: G3
зарезервируем для записи времени начала
функционирования системы
.
Блок ячеекC3
: G3
зарезервируем для записи времени начала
функционирования системы
![]() и начальных вероятностей
и начальных вероятностей![]() ,
взятых из (15). В блоке ячеекC4
: G4
поместим формулы Эйлера, по которым
рассчитываются вероятности для текущего
момента времени
,
взятых из (15). В блоке ячеекC4
: G4
поместим формулы Эйлера, по которым
рассчитываются вероятности для текущего
момента времени
![]() по известным вероятностям для предыдущего
момента времени
по известным вероятностям для предыдущего
момента времени![]() .
Эти формулы приведены в табл.7.
.
Эти формулы приведены в табл.7.
Таблица 7
|
C4 |
C3 + $B$3 |
|
D4 |
D3 + $B$3 * (-$B$1 * D3 + $B$2 * E3) |
|
E4 |
E3 + $B$3 * ($B$1 * D3 – ($B$2 + $B$1) * E3 + $B$2 * F3) |
|
F4 |
F3 + $B$3 * ($B$1 * E3 – ( $B$2 + $B$1) * F3 + $B$2 * G3) |
|
G4 |
F3 + $B$3 * ($B$1 *F 3 – $B$2 *G 3) |
Протягивая эти формулы вниз, получим решение системы уравнений.
В табл.6 колонка I служит для контроля правильности введенных соотношений, а также для контроля правильности выбора шага интегрирования. В клетку I3 запишем формулу
= СУММ( D3 : G3 ),
которую
протянем вниз. Для принятого шага
![]() элементы этой колонки равны «единице».
А это означает правильность решения
системы дифференциальных уравнений
(14).
элементы этой колонки равны «единице».
А это означает правильность решения
системы дифференциальных уравнений
(14).
Вероятности
![]() с ростом времени
с ростом времени![]() стремятся к своим стационарным значениям
стремятся к своим стационарным значениям![]() ,
не зависящим от времени и полученным в
п.3.2. Поэтому, таблицу вероятностей
вычисляем, пока ни будут выполняться
соотношения:
,
не зависящим от времени и полученным в
п.3.2. Поэтому, таблицу вероятностей
вычисляем, пока ни будут выполняться
соотношения:
![]() ,
,
![]() ,
,![]() ,
,![]() .
.
Как
следует из табл.2, указанные соотношения
выполняются с точностью до трех знаков
после запятой уже для момента времени
![]() .
.
Графическая иллюстрация вероятностей из табл.6 приведена на рис.5.
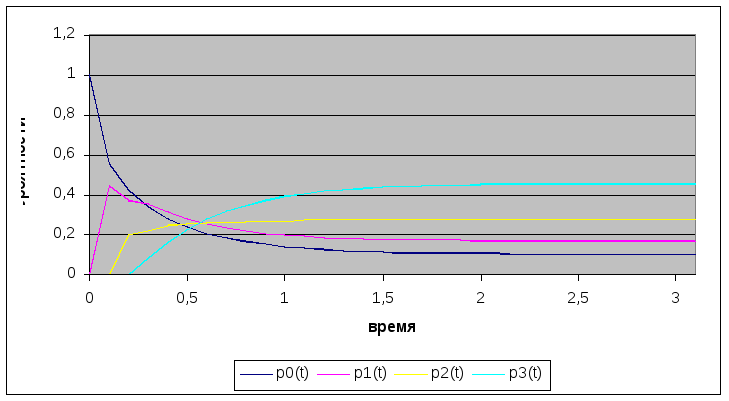
Рис.5. Вероятности состояний системы
Рис.5 свидетельствует о достаточно быстром вхождении процесса в стационарный режим, при котором вероятности практически не изменяются, а графики становятся параллельными оси времени.