

2. Задачи к экзамену
Задачи 1 – 5
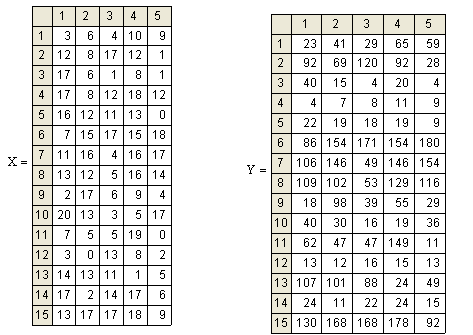
В верхней строке каждой таблицы – номер варианта (1…5); в боковом столбце – номер эксперимента. Х – значение входной величины объекта автоматического регулирования. Y – значение выходной величины. Используя метод наименьших квадратов, аппроксимируйте статическую характеристику объекта уравнением прямой линии.
Задачи 6 – 15
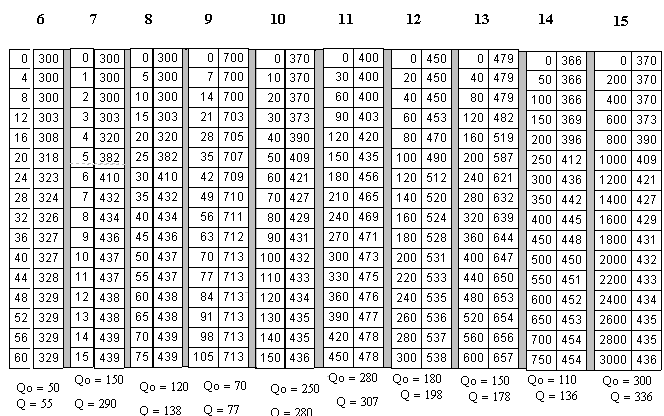
В таблице приведены исходные данные для задач №№ 6 … 15.
Каждый из 10 вариантов состоит из двух столбцов, отделённых вертикальной полоской от соседнего варианта.
В
левом столбце из каждой их пары приведена
величина t
– времени (сек) после поступления
скачкообразного возмущения на вход
объекта автоматического регулирования.
В каждом правом столбце приведены
значения выходной величины объекта (H)
для каждого значения t
.
![]() -
равновесное (исходное) значение входной
величины.
-
равновесное (исходное) значение входной
величины.![]() - её значение после возмущения.
- её значение после возмущения.
Необходимо построить по данным таблицы график переходного процесса и определить по нему 1) время полного запаздывания (τ) , 2) постоянную времени (Т) , 3) коэффициент передачи (К).
Конспекты некоторых лекций
ДИНАМИКА ОБЪЕКТА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Для целенаправленного воздействия на объект автоматического регулирования необходимо знать, что происходит с ним после нарушения равновесия.
В
равновесии приток и сток вещества или
энергии (проходящих через объект) равны
друг другу и постоянны:
![]() =
=
![]() =
=
![]() = const, т.е.
= const, т.е.
![]() =
=
![]() = 0. Выходная величина при этом остаётся
неизменной:
= 0. Выходная величина при этом остаётся
неизменной:
![]() =
=
![]() = const , т.е.
= const , т.е.
![]() =
=
![]() = 0.
= 0.
Допустим,
что
в момент,
принимаемый за начало отсчёта
времени,
произошло возмущение на притоке,
который принял значение:
![]() =
=
![]() . Сразу же начнётся нарастание отклонения
выходной величины, скорость которого
будет тем больше, чем больше возмущение
. Сразу же начнётся нарастание отклонения
выходной величины, скорость которого
будет тем больше, чем больше возмущение
![]() =
=
![]() :
:
![]() =
=
![]() , где А - коэффициент пропорциональности.
Обозначим
, где А - коэффициент пропорциональности.
Обозначим
![]() = L и назовём эту величину коэффициентом
ёмкости объекта.
Теперь наше дифферециальное уравнение
несколько изменит свой вид:
= L и назовём эту величину коэффициентом
ёмкости объекта.
Теперь наше дифферециальное уравнение
несколько изменит свой вид:
![]() = Qп
– Qс
=
= Qп
– Qс
=
![]() ...............(1)
...............(1)
Физический смысл коэффициента ёмкости становится понятным после разделения переменных и интегрирования:
![]() =
=
![]() ;
;
![]() =
=
![]() ; L =
; L =
![]() . Но
. Но
![]() - изменение количества вещества или
энергии за время t. Таким образом
коэффициент
ёмкости L численно равен изменению
количества вещества или энергии, на
единицу отклонения
- изменение количества вещества или
энергии за время t. Таким образом
коэффициент
ёмкости L численно равен изменению
количества вещества или энергии, на
единицу отклонения
![]() , вызванного этим изменением.
, вызванного этим изменением.
Простейшие примеры:
Объект регулирования – резервуар с водой.
Обозначим
буквой F
площадь поперечного сечения резервуара.
Для того, чтобы уровень жидкости после
возмущения Q
возрос на величину H,
требуется дополнительно ввести в
резервуар объём жидкости V
= FH,
т.е.
![]() =
=
![]() = F .
= F .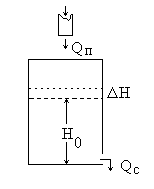
Объект регулирования – нагревательная печь.
Здесь
согласно общему определению (см. курсив)
коэффициент ёмкости равен изменению
количества тепла, поступающего в печь,
на единицу (1 градус) отклонения
температуры, обусловленного этим
изменением. По физическому смыслу это
теплоёмкость печи: L =
 , где i порядковый номер элемента печи
(кладка, арматура, газовая среда рабочего
пространства, нагреваемая отливка) ,
, где i порядковый номер элемента печи
(кладка, арматура, газовая среда рабочего
пространства, нагреваемая отливка) ,![]() - масса элемента,
- масса элемента,![]() - его удельная теплоёмкость.
- его удельная теплоёмкость.
В первом примере коэффициент ёмкости есть константа, поскольку площадь сечения резервуара одна и та же на любой высоте.
Во втором примере коэффициент ёмкости непостоянен, поскольку теплоёмкости элементов печи (как известно) зависят от температуры.
В уравнении (1) коэффициент L есть коэффициент при производной. Дифференциальные уравнения с постоянными коэффициентами называются линейными в отличие от нелинейных уравнений, коэффициенты которых непостоянны. Как правило, методы математического моделирования САР базируются на допущении о линейности уравнений динамики (постоянстве их коэффициентов). Поскольку объект регулирования входит в состав САР, то приращения H обычно невелики. Поэтому непостоянством коэффициента ёмкости можно пренебрегать и использовать для решения и анализа уравнений динамики сравнительно простые математические методы и алгоритмы.
С понятием коэффициента ёмкости связано понятие ёмкости объекта регулирования
![]() =
=
![]() .Эта
величина характеризует способность
объекта
регулирования к накоплению (аккумуляции)
вещества или энергии. Например, в
рассмотренном выше проточном резервуаре
накапливается определённый объём
жидкости, поскольку имеется некоторая
ёмкость, истечение из которой затрудняется
гидравлическим сопротивлением на стоке.
.Эта
величина характеризует способность
объекта
регулирования к накоплению (аккумуляции)
вещества или энергии. Например, в
рассмотренном выше проточном резервуаре
накапливается определённый объём
жидкости, поскольку имеется некоторая
ёмкость, истечение из которой затрудняется
гидравлическим сопротивлением на стоке.
Печь аккумулирует тепло, поскольку её элементы обладают теплоёмкостью, а теплопотери в окружающее пространство лимитируются тепловым сопротивлением кладки и стенок печи.
Если объект регулирования имеет одну ёмкость, то соответственно он называется одноёмкостным. Если имеется несколько (две и более) ёмкостей, разделённых сопротивлениями, то объект регулирования называют многоёмкостным. Типичным примером многоёмкостного объекта являются сообщающиеся сосуды.
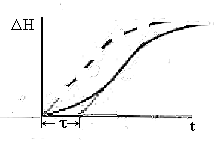
В
равновесном состоянии приток и сток
одинаковы. Поэтому одинаковы и уровни
жидкости. Если равновесие нарушится,
например, при увеличении притока, то в
течение некоторого времени уровень
жидкости в правом резервуаре (сплошная
линия) будет увеличиваться с меньшей
скоростью, чем в левом. (пунктир).
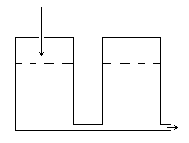
Это
и является причиной ёмкостного
(переходного)
запаздывания
,
которое тем больше, чем больше ёмкостей
содержит многоёмкостный объект. Многоёмкостным
объектом является также печь, рабочее
пространство которой отделено от
топливосжигающих устройств огнеупорной
стенкой. Несколько тепловых ёмкостей,
разделённых термическими сопротивлениями
содержится, например, в рекуператоре.
ОБОБЩЁННОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ДИНАМИКИ
Рассмотренное
выше дифференциальное уравнение (1) не
отражает возможного наличия самовыравнивания
в объекте. Известно, что самовыравнивание
может быть как на притоке, так и на стоке,
если не равны нулю производные
![]() и
и![]() .
Здесь индекс 0 относится к моменту
нарушения равновесия.
.
Здесь индекс 0 относится к моменту
нарушения равновесия.
Если
равновесие нарушено возмущением Q
на притоке, то в любой последующий момент
времени
![]() ;
;
![]() .
.
В этих формулы последние слагаемые суть приращения, обусловленные самовыравниванием.
Подставим эти выражения в (1) :
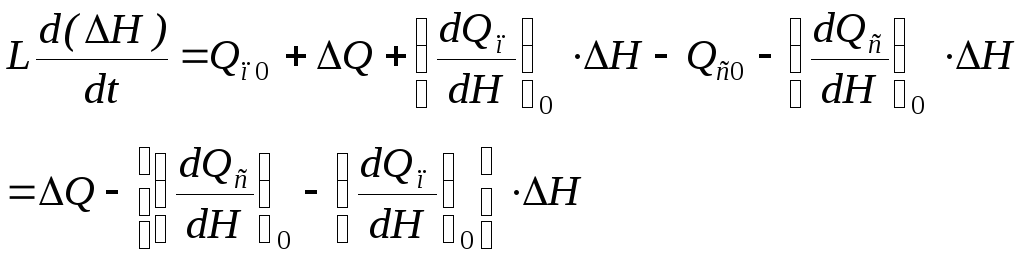
или:
 .
.
Перейдём
к безразмерным переменным
![]() и
и
![]() :
:

или
![]() ………………
( 2),
………………
( 2),
где
![]() (время разгона)
;
(время разгона)
;
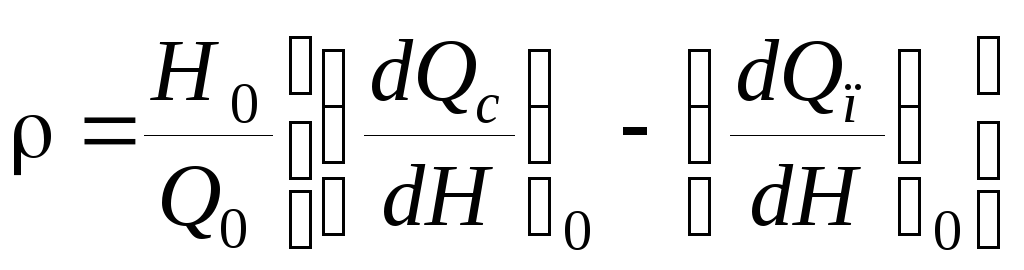 (коэффициент
самовыравнивания).
(коэффициент
самовыравнивания).
Если
объект регулирования обладает
самовыравниванием, то
![]() .
Введём новые константы – постоянную
времени
.
Введём новые константы – постоянную
времени![]() и
коэффициент передачи
и
коэффициент передачи![]() .
Подставив их в (2), получим:
.
Подставив их в (2), получим:
![]() ………………
(3).
………………
(3).
При нулевых начальных условиях решим (например, с помощью преобразования Лапласа) дифференциальные уравнения (2) и (3):
 …..
( 2а) ;
…..
( 2а) ;
 ……… (3а) .
……… (3а) .
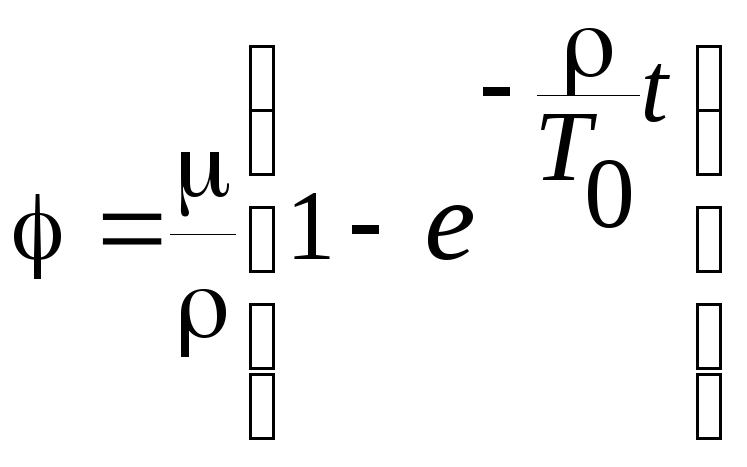
Анализ полученных результатов при > 0; = 0 и < 0 /
При > 0 имеем при
 ,
т.е. после скачкообразного ступенчатого
возмущения происходит постепенный
переход к новому равновесному состоянию.
,
т.е. после скачкообразного ступенчатого
возмущения происходит постепенный
переход к новому равновесному состоянию.
Этот
переход имеет асимптотический характер.
Предел, к которому стремится относительное
отклонение выходной величины объекта
называют потенциальным отклонением
п
. Такое
поведение типично для статических
объектов автоматического регулирования.

Обратимся к дифференциальному уравнению (2) . Если = 0, имеем при
 ,
т.е. после скачкообразного ступенчатого
возмущения
происходит ничем не ограниченное
нарастание величины относительного
отклонения выходной величины объекта
от её первоначального значения со
скоростью
,
т.е. после скачкообразного ступенчатого
возмущения
происходит ничем не ограниченное
нарастание величины относительного
отклонения выходной величины объекта
от её первоначального значения со
скоростью
![]() :
:
Мы знаем, что такое поведение характерно для астатических объектов автоматического регулирования.
Обратимся к выражениям (2) и (2а) . Если < 0, имеем :
![]() и
и
 .
.
Видно,
что при
![]() ,
причём в отличие от случаяII
это изменение происходит со всё
нарастающей скоростью, так как
,
причём в отличие от случаяII
это изменение происходит со всё
нарастающей скоростью, так как
![]() .
.
Такие
объекты называются неустойчивыми.
Здесь даже небольшое нарушение равновесия
может привести к катастрофическим
последствиям, т.к. скорость нарастания
отклонения
тем больше, чем больше само отклонение. В
качестве примеров можно привести
некоторые процессы ядерной энергетики,
ситуации взрывов, пожаров, явление
самовозбуждения в электронных усилителях
при положительных обратных связях. В
этих случаях особенно важно использовать
быстродействующие автоматические
регуляторы, например, регуляторы
с предварением.
РЕГУЛЯТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
В отличие от регуляторов дискретного действия (позиционных регуляторов), регуляторы непрерывного действия обладают непрерывной характеристикой. Иными словами интенсивность регулирующего воздействия на объект регулирования является непрерывной функцией рассогласования в объекте, например:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
Здесь
![]() -рассогласование
в объекте регулирования
-рассогласование
в объекте регулирования
(относительное отклонение выходной величины от
заданного значения);
![]() -
относительное изменение входной величины
-
относительное изменение входной величины
объекта под действием регулятора (далее будем
использовать термин регулирующее воздействие);
k, k1, k2 – коэффициенты передачи.
В зависимости от того, какова именно характеристика регулятора (1, 2, 3 или 4) относят регулятор к определённой категории. Эти категории таковы:
- интегральный регулятор;
- пропорциональный,
- пропорционально-интегральный,
- пропорционально-интегрально-дифференциальный.
Пользуясь помещённой здесь ранее изученной схемой, вспомните, как осуществляется интегральное регулирование. Постарайтесь ответить на вопрос – почему в системах интегрального регулирования могут возникать колебания?
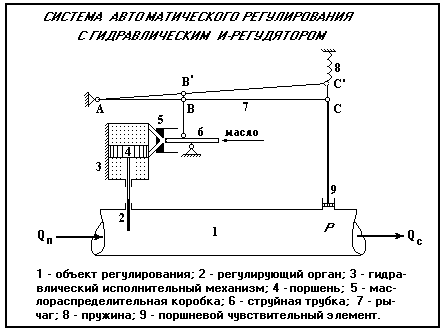
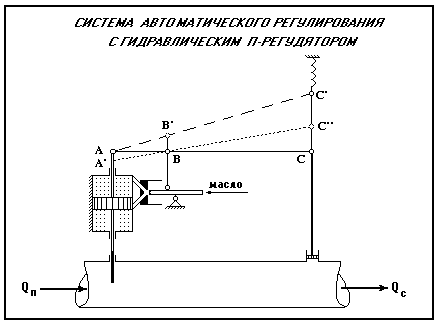
Вы видите, что имеется много общего с ранее рассмотренной схемой САР, использующей гидравлический И-регулятор. Отличие заключается в том, что поршень гидравлического исполнительного механизма (ИМ) имеет верхний шток, жёстко соединённый с точкой А рычага АВС. Поэтому перемещение поршня приводит к соответствующему перемещению точки А. При этом рычаг АВС поворачивается относительно подвижной шарнирной опоры С. Если регулируемое давление газа равно заданному значению, рычаг и струйная трубка находятся в горизонтальном положении, при котором поршень гидравлического цилиндра неподвижен. Допустим, что давление газа возросло. Это приведёт к перемещению точки С в положение С’ (рычаг АВС повернётся вокруг опоры в точке А и займёт положение АВ’C’. Поскольку точка В при этом переместится в положение В’, то пропорционально сместится вверх сопло струйной трубки. Это приведёт к тому, что возникнет разница между расходами масла, поступающего в над- и подпоршневое пространства ИМ. Поршень пойдёт вниз, благодаря чему начнёт уменьшаться расход газа, давление которого будет постепенно приближаться к норме. В отличие от аналогичного интегрального регулятора (см. верхнюю схему) здесь точка А начнёт движение под воздействием поршня ИМ. Соответственно будет смещаться вниз и сопло струйной трубки, приводя к снижению скорости перемещения поршня ИМ. Таким образом, рычаг АВС будет совершать сложное перемещение: благодаря снижению давления газа будет опускаться точка С', причём скорость её смещения будет несколько отставать от скорости смещения точки А. Всё это завершится в положении рычага A’BC’’. "Недорегулирование" в виде отрезка C''C характеризует наличие неизбежного остаточного отклонения, являющегося отличительной особенностью пропорционального регулирования.
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОЕ РЕГУЛИРОВАНИЕ
Достоинства П-регулятора (быстрое завершение переходного процесса и отсутствие колебаний) иногда перевешиваются его недостатком (наличие остаточного отклонения). В свою очередь, слишком медленный и часто колебательный процесс интегрального регулирования всегда сходится точно к заданному значению. Достоинства обоих типов регуляторов сочетаются в пропорционально-интегральном (ПИ) регуляторе.
Динамическая характеристика и передаточная функция ПИ-регулятора
Скорость регулирующего воздействия здесь определяется выражением:
![]() (
3 )
(
3 )
Два
слагаемых в правой части этого выражения
по-разному проявляют себя на протяжении
переходного процесса в САР. Сначала
пока отклонение
мало, а скорость его роста очень велика,
основную роль играет первое слагаемое,
т.е. воздействие на объект происходит
по закону пропорционального регулирования
![]() .
Когда вследствие этого быстро снизится
до нуля скорость
.
Когда вследствие этого быстро снизится
до нуля скорость![]() ,
но возникнет остаточное отклонение,
начнётся второй более медленный этап
регулирования, характеризующийся
соотношением:
,
но возникнет остаточное отклонение,
начнётся второй более медленный этап
регулирования, характеризующийся
соотношением:
![]() .
Таким образом, регулируемая величина
неизбежно возвратится к заданному
значению.
.
Таким образом, регулируемая величина
неизбежно возвратится к заданному
значению.
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО – ДИФФЕРЕНЦИАЛЬНОЕ
РЕГУЛИРОВАНИЕ
(регулирование с предварением)
Рассмотрим графики переходных процессов, показанные на нижеследующем рисунке.
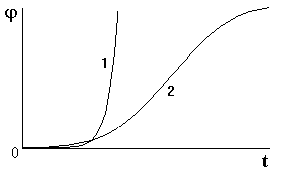
Здесь
показаны кривые переходных процессов
на неустойчивом объекте (1) и на статическом
объекте с большим ёмкостным запаздыванием
(2). В обоих случаях начало переходного
процесса характеризуется малой величиной
как рассогласования
![]() ,
так и скорости его нарастания
,
так и скорости его нарастания![]() .
В этих условиях ни один из ранее
рассмотренных регуляторов не обеспечит
своевременного интенсивного воздействия
на объект регулирования. Однако если
применитьрегулятор
с предварением,
реагирующий на ускорение
рассогласования
.
В этих условиях ни один из ранее
рассмотренных регуляторов не обеспечит
своевременного интенсивного воздействия
на объект регулирования. Однако если
применитьрегулятор
с предварением,
реагирующий на ускорение
рассогласования
![]() ,
то регулирующее воздействие окажется
существенным уже на самой ранней стадии
переходного процесса. Типичным примером
регулятора с предварением является
ПИД-регулятор
(пропорционально-интегральный-дифференциальный).
Его характеристика имеет вид:
,
то регулирующее воздействие окажется
существенным уже на самой ранней стадии
переходного процесса. Типичным примером
регулятора с предварением является
ПИД-регулятор
(пропорционально-интегральный-дифференциальный).
Его характеристика имеет вид:
![]() .
.
Основная
особенность любого регулятора с
предварением – наличие датчика ускорения
![]() .
В системах автоматической стабилизации
направления движения (например, в
автопилотах) такими датчиками снабжены
гироскопы.Когда
самолет совершает наклоны, повороты и
прочие "танцевальные па" в воздухе,
гироскоп остается неподвижным относительно
плоскости горизонта. Благодаря этому
навигационный мозг крылатой машины
может измерить угол крена, определить
вектор движения в каждый конкретный
момент. Этот же принцип стабилизации
используется в приборах космической
навигации, в электронных стабилизаторах
наводки на цель вооружения сухопутных
боевых машин и кораблей военно-морского
флота.
.
В системах автоматической стабилизации
направления движения (например, в
автопилотах) такими датчиками снабжены
гироскопы.Когда
самолет совершает наклоны, повороты и
прочие "танцевальные па" в воздухе,
гироскоп остается неподвижным относительно
плоскости горизонта. Благодаря этому
навигационный мозг крылатой машины
может измерить угол крена, определить
вектор движения в каждый конкретный
момент. Этот же принцип стабилизации
используется в приборах космической
навигации, в электронных стабилизаторах
наводки на цель вооружения сухопутных
боевых машин и кораблей военно-морского
флота.
ИНЖЕНЕРНЫЙ МЕТОД ПРОЕКТИРОВАНИЯ САР
Синтез оптимальных САР на основе использования дифференциальных уравнений динамики и передаточных функций весьма эффективен, но трудоёмок. Поэтому в инженерной практике обычно пользуются более простыми методами, основанными на использовании номограмм. В большинстве случаев результаты оказываются достаточно пригодными для производственных целей.
Рассмотрим основные этапы этой методики.
Состав исходных данных для проектирования.
Параметры объекта регулирования:
Тип
объекта (статический или астатический);
Т, К – постоянная времени статического
объекта и его коэффициент передачи
(соответственно); То
– время разгона астатического объекта;
![]() -
величина полного запаздывания.
-
величина полного запаздывания.
Параметры номинального режима и допустимые пределы для них:
Заданные значения входной (Qo) и выходной (Нo) величины объекта (например, номинальные расход топлива и температура в рабочем пространстве печи);
Прогноз
величины ожидаемого возмущения (![]() ).
).
Желательный уровень качества регулирования:
1.3.1. Один из трёх типов переходного процесса (I – апериодический; II – с 20%-ным
перерегулированием,
III
– с минимальным среднеквадратичным
отклонением
![]() )
)
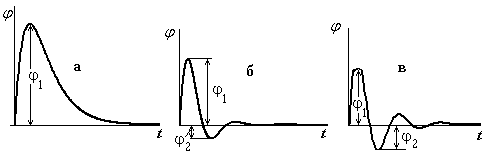
Типовые (оптимальные) процессы регулирования
а
– апериодический; б – с 20%-ным
перерегулированием; в - с минимальным
среднеквадратичным отклонением
![]() ;
;![]() -
перерегулирование, %.
-
перерегулирование, %.
Апериодический процесс обеспечивает отсутствие перерегулирования, но сопровождается заметной величиной максимального динамического отклонения 1 .
Процесс
с 20%-ным перерегулированием характеризуется
сравнительно быстро уменьшающимися по
амплитуде колебаниями регулируемой
величины .
При этом её максимальное динамическое
отклонение 1
меньше, чем
в предыдущем случае (при прочих равных
условиях). Процесс с
![]() характеризуется значительным
перерегулированием и большой
продолжительностью переходного процесса,
однако, ему свойственна меньшая величина
максимального динамического отклонения1,
а также минимум дисперсии отклонения.
за время переходного процесса.
характеризуется значительным
перерегулированием и большой
продолжительностью переходного процесса,
однако, ему свойственна меньшая величина
максимального динамического отклонения1,
а также минимум дисперсии отклонения.
за время переходного процесса.
1.3.2. Максимально допустимое время регулирования (tp)max
1.3.3. Максимально допустимое остаточное отклонение (Ност)max .
Выбор типа регулятора для статического объекта регулирования.
Важнейшим показателем качества регулирования является максимальное динамическое отклонение регулируемой величины Н от задания Но . Это отклонение называется динамическим, поскольку оно имеет временный, преходящий характер. Наибольшим отклонением в устойчивом, т.е. сходящемся переходном процессе будет первое отклонение 1, непосредственно следующее за нарушением равновесия вследствие возмущения.
Степень
воздействия регулятора, понижающего
динамическое отклонения, характеризуется
динамическим
коэффициентом регулирования
![]() , где
, где![]() -
потенциальное отклонение выходной
величины статического объекта при
отсутствии регулятора. Эту величину
легко определить экспериментально,
либо рассчитать по формуле:
-
потенциальное отклонение выходной
величины статического объекта при
отсутствии регулятора. Эту величину
легко определить экспериментально,
либо рассчитать по формуле:![]() .
Здесь К – коэффициент передачи объекта;
- относительное возмущение.
.
Здесь К – коэффициент передачи объекта;
- относительное возмущение.
Регулятор выбирают с помощью номограммы, по значениям двух безразмерных величин: Rд и /Т .
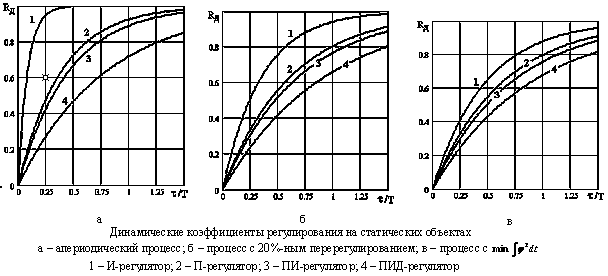
Пусть,
например, требуется обеспечить
апериодический переходный процесс при
запаздывании в объекте
= 20 сек и постоянной времени Т = 80 сек,
т.е. при
![]() ;
Задавшись
;
Задавшись![]() ,
получим соответствующую точку на
графикеа.
Поскольку отмеченная точка лежит ниже
линии 1, но выше остальных линий, то можно
остановить свой выбор на любом регуляторе
за исключением И-регулятора. В общем
случае, если отмеченная точка лежит
выше одной из линий(1, 2, 3 или 4) или
находится на ней, то возможен выбор
регулятора, соответствующего этой
линии. Иначе, говоря, каждая линия есть
нижняя граница области возможного
применения соответствующего регулятора.
,
получим соответствующую точку на
графикеа.
Поскольку отмеченная точка лежит ниже
линии 1, но выше остальных линий, то можно
остановить свой выбор на любом регуляторе
за исключением И-регулятора. В общем
случае, если отмеченная точка лежит
выше одной из линий(1, 2, 3 или 4) или
находится на ней, то возможен выбор
регулятора, соответствующего этой
линии. Иначе, говоря, каждая линия есть
нижняя граница области возможного
применения соответствующего регулятора.
Допустим, что мы остановили свой выбор на пропорциональном регуляторе (П-ре-гулятор). Требуется оценить возможную величину остаточного отклонения, которое неизбежно сопутствует этому выбору.
На
нижеследующем графике по оси ординат
отложено безразмерное относительное
остаточное отклонение
![]()
![]() ,
откуда
,
откуда![]() .
.
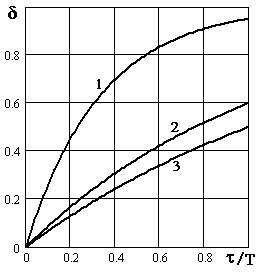
Относительное остаточное отклонение на статических объектах
1 – апериодический процесс; 2 – с 20%-ным перерегулированием;
3
- с минимальным среднеквадратичным
отклонением
![]() .
.
Например,
при
![]() ,
найдём по графику
= 0,5. Если в
результате эксперимента или расчёта
обнаружилось, что
,
найдём по графику
= 0,5. Если в
результате эксперимента или расчёта
обнаружилось, что
![]() (изменение
температуры в печи при отсутствии
регулятора), то выбор пропорционального
регулятора будет сопровождаться
остаточным отклонением
(изменение
температуры в печи при отсутствии
регулятора), то выбор пропорционального
регулятора будет сопровождаться
остаточным отклонением![]() =
100С.
Если это отклонение больше максимально
допустимого остаточного отклонения
(Ност)max
, то от
П-регуля-тора придётся отказаться в
пользу ПИ либо ПИД регуляторов.
=
100С.
Если это отклонение больше максимально
допустимого остаточного отклонения
(Ност)max
, то от
П-регуля-тора придётся отказаться в
пользу ПИ либо ПИД регуляторов.
Следующим этапом проектирования САР является оценка продолжительности ожидаемого переходного процесса по нижеследующим графикам:
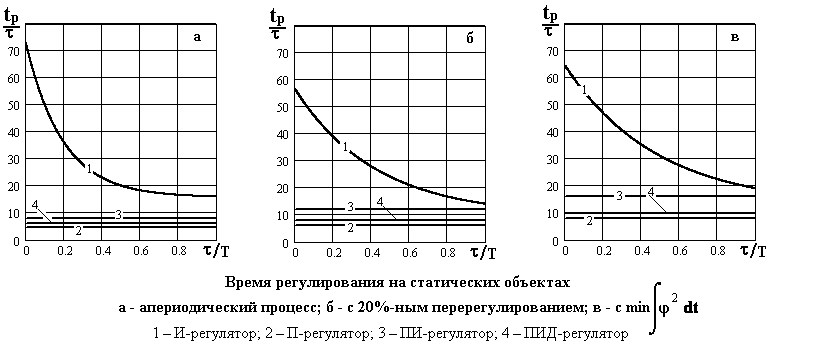
Кривая
1 на каждом из этих трёх графиков
используется для И-регулятора. Пусть
по-прежнему желателен апериодический
переходный процесс на объекте с величиной
![]() .
По графикуа
находим, что
ордината
.
По графикуа
находим, что
ордината
![]() ,
гдеtP
– время регулирования. Отсюда
,
гдеtP
– время регулирования. Отсюда
![]() с.
Если эта величина оказывается выше чем
ранее заданный предел (tp)max
, то И-регулятор применить не удастся.
с.
Если эта величина оказывается выше чем
ранее заданный предел (tp)max
, то И-регулятор применить не удастся.
Для расчёта времени регулирования применительно к другим типам регуляторов используют аналогичную методику.
Определение настройки регулятора.
Настроечные параметры выбранного регулятора легко определить по
формулам, приведенным в таблице:
|
Регулятор |
Типовой процесс регулирования | ||
|
апериодический. |
с 20% перере- гулированием. |
с
| |
|
И |
|
|
|
|
П |
|
|
|
|
ПИ |
|
|
|
|
ПИД |
|
|
|
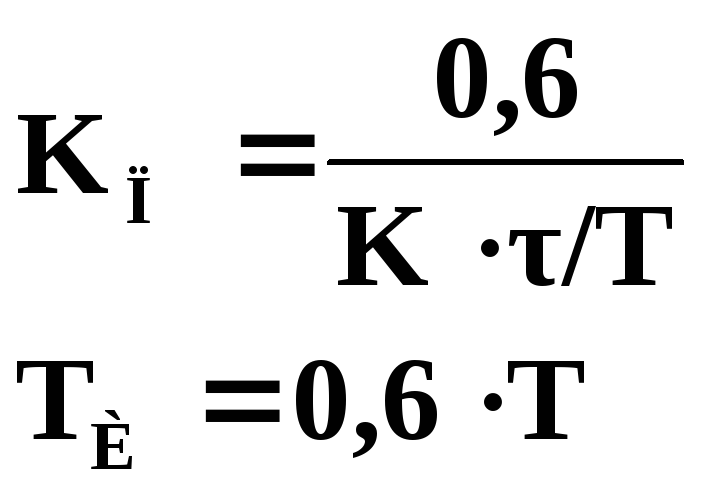
Здесь КИ – коэффициент передачи И-регулятора; КП – коэффициент передачи П-регулятора или блока пропорционального регулирования, ТИ – время изодрома,
ТП – время предварения..
Мы рассмотрели процедуры выбора регулятора и расчёта его настроек для статических объектов. Если объект регулирования является астатическим, то используют другие графики, номограммы и таблицы, имеющиеся в справочной литературе.
НАДЁЖНОСТЬ СИСТЕМ АВТОМАТИЗАЦИИ
Надёжностью системы или её звена называют вероятность безотказной работы в течение некоторого времени.
Отказ – есть любое отклонение функционирования системы от нормы.
С точки зрения теории вероятностей надёжная работа и отказ представляют собой взаимодополняющие друг друга противоположные случайные события, поэтому, обозначив надёжность буквой P, а вероятность отказа буквой Q, получаем: P + Q = 1 (при испытании система либо не откажет, либо откажет – третьего не дано).
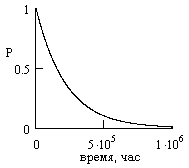
Надёжность системы зависит от времени её эксплуатации (см. рисунок). Вероятность безотказной работы в начале эксплуатации системы достаточно велика, но убывает в течение срока эксплуатации, асимптотически стремясь к нулю.
Напоминаем,
что самое надёжное устройство может
отказать даже после короткого срока
эксплуатации и, наоборот, отдельные
экземпляры малонадёжных устройств
могут безотказно работать в течение
весьма большого времени. Здесь нет
никакого противоречия, ибо закономерности
случайных событий проявляются лишь
при массовых испытаниях, поскольку
вероятность это предел, к которому
стремится частота случайного события.
Вы знаете, что любая техническая система (в частности система автоматики) состоит из подсистем, а те, в свою очередь, могут быть расчленены на подсистемы следующего иерархического уровня вплоть до неделимых их частей – элементов системы.
Зная надёжности элементов системы и её структуру легко оценить надёжность этой системы.
Надёжность элемента системы
Установлено,
что любой элемент системы имеет
надёжность, подчиняющуюся экспоненциальному
закону распределения вероятностей
во времени:
![]() ,
где
,
где
p – надёжность элемента; t – время (час); - средняя интенсивность отказов в единицу времени (её величину находят по номенклатурным справочникам, сертификатам и др. документации). Пример таких справочных данных приведен в таблице:
Средняя интенсивность отказов в единицу времени
-
Наименование элемента

Двигатели
8,6
Миниредукторы
0,12
Микросхемы
0,024
Конденсаторы
0,035
Резисторы
10,8
Трансформаторы
0,04
Соединения паяные
0,78
Соединения штепсельные
0,36
Обычно величину определяют по данным стендовых или натурных испытаний продукции, а также по сведениям о её рекламациях (например, из мастерских гарантийного ремонта аппаратуры).
Пусть, например, стендовым испытаниям были подвергнуты 100 единиц продукции. Из них 2 единицы отказали в течение первых 100 часов испытаний; 12 единиц – в течение 500 часов с начала испытаний; 34 единицы – в течение 1200 часов этих непрерывных испытаний. Тогда среднее время наработки на отказ составляет:
![]() ч.
ч.
Средняя
интенсивность отказов в единицу времени
есть величина, обратная среднему времени
наработки на отказ:![]() .
.