

2.4 Средства автоматизации, используемые на рассматриваемом объекте
Во избежание быстрого износа канатов, который может привести к аварийной ситуации, используется концевой выключатель балансировки канатов. В случае, если канат выходит из своего паза, срабатывает концевой и подаётся сигнал на цифровой вход ПЛК (программируемый логический контроллер) – «Канат не в ручье», а ПЛК в свою очередь не даёт разрешение на включение IGBT транзисторов.
Чтобы крюковая подвеска не поднималась слишком высоко, и не возникало аварийных ситуаций, используются ограничители подъёма. При срабатывании концевого выключателя поступает сигнал на цифровой вход ПЛК, и инвертор прекращает свою работу.
Во избежание быстрого износа механических частей механизма подъёма предусмотрено следующее: чем выше будет подниматься крюковая подвеска, тем медленнее будет скорость подъёма. Реализовано это с помощью датчика скорости «Encoder». Инвертор считывает количество импульсов, поступающих с датчика скорости, и регулирует скорость в соответствии с заданной программой.
Если по какой-либо причине не сработал основной концевой выключатель и подъём продолжается, то сработает аварийный концевой выключатель, механизм прекратит свою работу. Чтобы механизм возобновил свою работу, необходим ручной взвод аварийного концевого выключателя.
Чтобы не возникало перегрузки двигателя и больших механических напряжений в балках моста, используется датчик нагрузки. Схема включения датчика нагрузки представлена на рисунке 11. Он представляет собой мост, в плечах которого включены тензоэлементы. Одно плечо этого моста находится без нагрузки, а на другое плечо давит своим весом барабан с канатом и груз, подвешенный на крюке. Когда кран начинает поднимать груз, равновесие между плечами моста нарушается, и на выходе появляется сигнал напряжением от 0 до 12В. Через усилитель этот сигнал поступает на регистратор параметров. В случае если груз превышает допустимый вес (в данном случае 80 тонн), на дисплее в кабине машиниста крана появляется сообщение о превышение веса груза. Если машинист попытается поднять этот вес, сигнал, поступивший на регистратор параметров, поступает на цифровой вход ПЛК и не даёт команду на включение IGBT транзисторов.
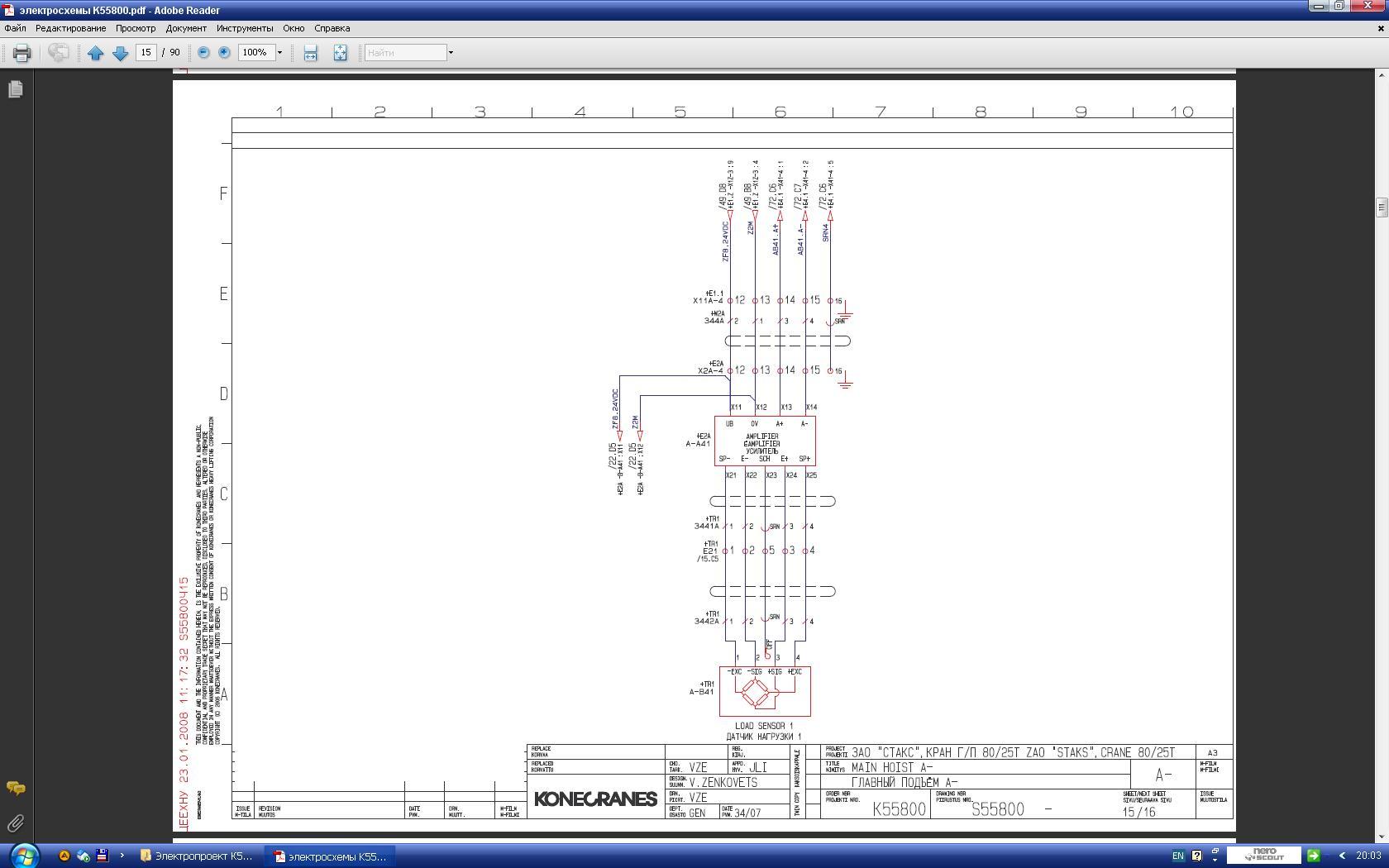
Рисунок 11 – Схема включения датчика нагрузки
Микроконтроллер обрабатывает данные с датчика нагрузки по программе, блок-схема алгоритма которой приведена на рисунке 12.
Для защиты двигателя от перенапряжения используются варисторы и реле контроля фаз. В случае если возникает перекос напряжений между фазами, срабатывает реле контроля фаз и не даёт включиться линейному контактору. Если же возникает мгновенный скачок напряжения, то срабатывают варисторы.
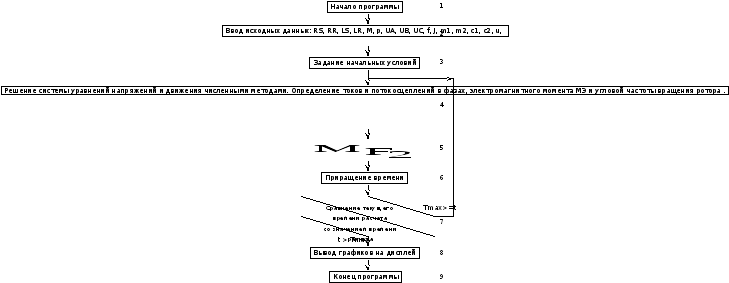
Рисунок 12 – Блок схема программы расчёта грузоподъёмности
Структурная схема системы ограничителя грузоподъёмности представлена на рисунке 13.
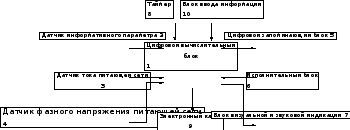
Рисунок 13 – Структурная схема ограничителя грузоподъёмности
Чтобы предотвратить перегрев обмоток двигателя, используются термисторы, встроенные в двигатель. Если обмотки нагреваются до температуры +150ºС, на экране панели оператора появляется надпись «Тревога». Если обмотки какого-либо из двигателей нагреваются до температуры 180ºС, на панели оператора появляется надпись «Стоп», и механизм, двигатель которого перегрет, останавливает свою работу до тех пор, пока обмотки двигателя не охладятся до номинальной температуры.
Для защиты силовых цепей и цепей управления от бросков тока служат автоматические выключатели.
Так как технологией производства предусмотрены два крана в разливочном пролёте, то необходимо избежать столкновений между ними. В данном случае используется радиодатчик «Gigasens». При сближении двух кранов антенна получает сигнал и передаёт его на цифровой вход ПЛК. Чем сильнее становится сигнал, тем медленнее едет кран, вплоть до полной остановки.
В случае, если необходимо срочно совершить какую-либо технологическую операцию, но сделать это по какой-либо причине с кабины нет возможности, предусмотрен резервный пульт управления. С помощью его можно осуществлять работу любого механизма.