

книги / Труды IX Международной (XX Всероссийской) конференции по автоматизированному электроприводу АЭП-2016 , Пермь, 3-7 октября 2016 г
..pdfУДК 519.718.2
Новый способ диагностирования технического состояния судовых электроэнергетических установок
А.В. Серебряков, А.С. Стеклов, В.Г. Титов
Нижегородский государственный технический университет им. Р.Е. Алексеева, Нижний Новгород, Россия
New method of technical condition diagnostics of ship electric power plants
A.V. Serebryakov, A.S. Steklov, V.G. Titov
Nizhny Novgorod State Technical University named after R.E. Alexeev,
Nizhny Novgorod, Russian Federation
Рассматривается новый способ диагностирования технического состояния силовой электроэнергетической установки (ЭЭУ), основанный на представлении ЭЭУ абстрактной динамической системой, процесс функционирования которой состоит в изменении состояния системы под воздействием внешних и внутренних возмущений. Разработан алгоритм диагностирования судовой ЭЭУ, позволяющий обнаруживать неисправности элементов установки с заданной глубиной диагностирования.
This paper details a new method of technical condition diagnostics of a ship electric power plant (EPP). The method is based on presenting the EPP as an abstract dynamic system, the operation of which involves system state transition under the effect of external and internal disturbances. A ship EPP diagnostic algorithm has been developed that enables locating faults of the power plant elements with a predefined diagnostic depth.
Ключевые слова: диагностика, алгоритм, синхронный генератор, трансформатор, преобразователь частоты.
Keywords: algorithm, frequency converter, synchronous generator, transformer.
Исследование результатов обработки статистических данных по флоту [1] показывает, что за период с 1997 по 2008 гг. при систематическом снижении количества судов на флоте относительный процент аварийности возрастает. Это свидетельствует о старении оборудования и недостаточной оснащенности современными средствами контроля и диагностирования технического состояния устройств, а также о малом количестве новых методов, разработок и устройств, повышающих безаварийность работы.
В качестве объекта диагностирования рассмотрим участок силовой электроэнергетической установки па-
рома, в который входят синхронные генераторы (СГ), трансформаторы (Тр), преобразователи частоты (ПЧ), гребные электродвигатели (ГЭД).
Суть нового подхода заключается в следующем: для создания общей системы диагностики целесообразно выглядит разбиение силовой ЭЭУ на элементы с созданием модуля оперативной диагностики каждого элемента и дальнейшего синтеза их в одну систему.
Последовательность синтеза программных средств диагностирования по предлагаемому способу включает
всебя следующие этапы:
–построение функциональной схемы каждого элемента участка ЭЭУ (СГ, Тр, ПЧ, ГЭД);
–построение математической модели для каждого элемента как объекта диагностирования с заданной глубиной диагностирования на основе функциональной схемы;
–математическое описание связей между входящими в модель элементами;
–построение таблицы функций неисправностей (ТФН) каждого элемента в соответствии с полученными данными;
–выделение минимальных совокупностей элементарных проверок путем преобразований ТФН;
–разработка частных алгоритмов диагностирования на основе полученных минимальных совокупностей элементарных проверок;
–построение математической модели, ТФН и разработка пригодного к программной реализации синтезированного алгоритма для ЭЭУ;
–программная реализация синтезированного алгоритма.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 491 -
Задача изучения ЭЭУ как объекта диагностирования связана с анализом функционирования исправного состояния, разграничением элементов и связей между ними, исследованием возможных их технических состояний, выделением их параметров, характеризующих техническое состояние объекта диагностирования (ОД), пределов, характера измерения и технической возможности их контроля, степени детализации возможных мест, видов, причиниглубиныдиагностирования[2, 3].
Теоретическое обобщение процесса диагностирования ЭЭУ при ограниченной информации о ее техническом состоянии предопределяет использование формального описания элементов ОД, т.е. их математической модели диагностирования. Последняя должна обеспечивать необходимую глубину диагностирования и быть пригодной для дальнейшего синтеза алгоритмов диагностирования.
Для каждого вида судового электрооборудования можно указать ряд параметров и (или) признаков, характеризующих техническое состояние и дефекты (параметры, выраженные электрическими величинами: напряжение, ток, частота, сопротивление и т.п.; параметры, выраженные неэлектрическнми величинами: температура, виброскорость и т.п.). В зависимости от применяемого метода диагностирования используются те или иные из них, называемые диагностическими параметрами и (или) признаками [4].
Если значения (диагностических признаков) ДП объекта не поддаются непосредственному измерению, то их находят путем обработки значений других параметров, связанных с диагностическими известными зависимостями. Определение ДП формальными методами предполагает построение и анализ диагностической модели объекта. Такие методы позволяют выбрать ДП, достаточные или необходимые для проведения соответствующего вида диагностирования: проверки исправности, работоспособности, функционирования, поиска дефекта [5].
Выбор совокупности диагностических параметров является ответственной задачей разработки системы технического диагностирования. Ее успешное решение возможно только при глубоком знании и тщательном анализе ЭЭУ и их элементов как объектов диагностирования. При выборе ДП учитываются их информативность, доступность для измерения и контроля, стоимость и время измерения. Предпочтение отдается параметрам, имеющим прямую функциональную связь с техническим состоянием диагностируемого элемента или объекта, обладающим большей информативностью, относительно легко и по возможности непосредственно измеряемым простыми средствами [6].
Контролировать все параметры, определяющие техническое состояние сложных ЭЭУ (полный контроль), практически невозможно, поэтому системы технической диагностики контролируют некоторое множество наиболее существенных параметров.
При отсутствии количественных показателей безотказности элементов выбор диагностических параметров ЭЭУ может быть выполнен путем опроса специалистов
(экспертов). С помощью метода экспертных оценок, используя опыт, знания и интуицию высококвалифицированных специалистов, можно, например, построить упорядоченный ряд параметров, определяющих техническое состояние элементов ЭЭУ.
На основе полученного ряда параметров (признаков) с учетом расположения датчиков могут быть составлены функциональные модели элементов объекта диагностирования [7]. На рис. 1 показана функциональная модель диагностирования СГ.
Предлагается новый способ, основанный на представлении ЭЭУ абстрактной динамической системой, процесс функционирования которой состоит в изменении состояния системы под воздействием внешних и внутренних возмущений. Базирующиеся на таком подходе математические модели элементов позволяют синтезировать не только остающийся неизменным к глубине диагностирования и структуре аппаратных средств диагностики алгоритм проведения диагностической процедуры, но и применить унифицированные первичные датчики с универсальной функциональной схемой для измерения разнообразных величин.
При описании технического состояния объекта пользуются общими математическими описаниями. К числу таких описаний можно отнести представление
Рис. 1. Функциональная модель диагностирования СГ: ДТ1–ДТ3 – датчики тока в 1–3 фазах; ДСИ1–ДСИ3 – датчики сопротивления изоляции в 1–3 фазах; ДН1–ДН3 – датчики напряжения в 1–3 фазах; Дtст – датчик температуры обмоток статора; ДВибр – датчик вибрации генератора; Дtрот – датчик температуры обмоток ротора; Дtподш – датчик температуры подшипника
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 492 -
элементов ЭЭУ динамическими системами, процесс функционирования которых состоит в варьировании состояния систем под воздействием внешних и внутренних причин. Эти причины составляют следующие множества: S – множество состояний s системы; Т – множество моментов времени t; X и Z – множества входных x и выходных z сигналов системы.
Представим математическую модель подобной системы как взаимосвязь переменных:
σ = ƒ(ξ, ζ, τ, Φ , Φ, Λ , Λ), |
(1) |
где s S, x X, z Z, t T, F* (t, x, s) = P*, F (t, x, s) = P –
операторы переходов, отражающие изменения состояния системы под воздействием возмущений; L* (t, x, s) = = y*, L (t, x, s) = y – операторы выходов, описывающие формирование выходного сигнала под действием возмущений. Индекс (*) принадлежит операторам, учитывающим действие внутренних возмущений.
Для распознавания технического состояния системы как объекта диагностирования необходимо пользоваться множеством технических состояний E. Входящие в него подмножества Ei (где i = 0, 1, 2, …, N) описывают технические состояния ei объекта, характеризующие совокупность возможных его состояний si. Соответственно, подмножество E0 (при i = 0) соответствует исправному состоянию объекта, а подмножества Ei (при i ≠ 0) – неисправным, вызванным появлением дефекта в i-й составной части объекта.
На практике часто нет необходимости строго следить за выполнением функциональных зависимостей между входными и выходными сигналами ОД.
Достаточно сделать лишь заключение о техническом состоянии элемента по результатам оценки значений его входных и выходных сигналов вида «в допуске (символ 1) – не в допуске (символ 0)». Тогда получаем результат взаимодействия совокупности операторов Мi = (Li, Li*, Fi, Fi*) уравнения (1), отражающий булеву функцию условий работы диагностируемого элемента. При этом каждый i-элемент объекта выполняет лишь один алгоритм работы. Тогда фактическое значение выходного сигнала определяется по формуле
Zi = Фi Ei, |
(2) |
где Фi – функция условия работы i-элемента, определяемая конъюнкцией внешних и внутренних переменных:
Фi = Mi xi1 xi2 … xik. |
(3) |
Физический смысл выражения (3) заключается в том, что лишь при всех допустимых входах и исправном состоянии элемента его выход Zi будет допустим. Если все N элементов математической модели исправны (работоспособны, правильно функционируют), т.е. если конъюнкция Z1 Z2 Z3 … ZN равна 1, то и весь объект диагностирования исправен (работоспособен, правильно функционирует).
Для получения математической модели каждый функциональный элемент заменяется логическим блоком, имеющим один выход и существенные для данного выхода входы. Сигналы между элементами ОД приняты как одиночныефункциональныесигналы.
Входные и выходные сигналы представлены дугами с символами Xi и Zi. Элементы объекта представлены вершинами графа с индексами i, где i – индекс элемента математической модели, на вход (с выхода) которого поступают (выходят) сигналы.
На основании изложенного разработаны математические модели элементов ЭЭУ как объекта диагностирования.
Входные внешние сигналы X1–Xn соответствуют входным сигналам, получаемым с датчиков системы диагностирования.
Внешний выходной сигнал Zm соответствует совокупности состояний того или иного элемента ЭЭУ.
Представим множество всех исправных e0 и неисправных ei (i = 1, 2, …, N), технических состояний объекта диагностирования символом E, а символом П – множество всех элементарных их проверок πj (j = 1, 2, …, n). Тогда прямоугольная таблица, строкам которой соответствуют элементарные проверки πj, столбцам – технические состояния ei элементов объекта, а клеткам j, i, находящимся на пересечениях строк πj и столбцов ei, – результаты Rij проверок, будет представлять собой матрицу или таблицу функций неисправностей объекта диагностирования.
Множество П возможных элементарных проверок (число строк ТФН) соответствует числу логических элементов. Так как i-я элементарная проверка характеризуется реакцией i-го элемента на его входные воздействия, то целесообразно (для наглядности) элементарные проверки в ТФН обозначать символами zi выходов элементов логической модели.
Заполнение ТФН осуществляется в соответствии с решениями логических уравнений (3) и (2) для каждого элемента математической модели
Z1 = e1 X1Z7 ; Z2 = e2 X2 Z8 ; Z3 = e3 X3 Z9 ; |
|
|
|
Z4 = e4 X1Z1Z10 Z12 ; Z5 = e5 X2 Z2 Z10 Z12 ; |
|
|
Z6 = e6 X3 Z3 Z10 Z12 ; Z7 = e7 X1 X 2 ; |
|
|
Z8 = e8 X 2 X3 ; Z9 = e9 X1 X3 ; |
(4) |
|
||
|
Z10 = e10 X 4 Z7 Z8 Z9 ; Z11 = e11 X5 ; |
|
|
|
|
|
|
|
Z12 = e12 X6 Z1Z2 Z3Z7 Z8 Z9 Z10 ; Z13 = e13 X7 Z12 ; |
|
|
|
Z14 = e14 Z1Z2 Z3Z4 Z5 Z6 Z7 Z8 Z9 Z10 Z11Z12 Z13 . |
|
На рис. 2 представлена математическая модель диагностирования синхронного генератора.
ТФН позволяет обнаружить дефект любого i-го элемента математической модели, поскольку все столбцы ei (i = 0, 1, 2, …, N) таблицы отличаются от столбца e0, а также различить (выделить) дефект любого элемента, так как все столбцы таблицы, соответствующие неисправным состояниям элементов, попарно различны.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 493 -

Рис. 2. Математическая модель диагностирования синхронного генератора
Представление непрерывного комбинационного объекта диагностирования моделями функциональной, логической или в форме ТФН позволяет не делать различий в решении задач определения правильности функционирования, работоспособности и исправности объекта. Разграничение вида технического состояния объекта определяется лишь наложением соответствующих ограничений на область допустимых значений входных и выходных сигналов элементов объекта.
Задачу построения алгоритма диагностирования можно сформулировать следующим образом. Задано множество Е возможных технических состояний объекта диагностирования. Элементами множества Е являются исправное (работоспособное, правильно функционирующее) и неисправные (неработоспособные, неправильно функционирующие) состояния объекта в соответствии с числом возможных или заданных дефектов объекта. Через фиксированное разбиение множества Е на λ непересекающихся подмножеств Ev, где v = 1, 2, …, λ, задана требуемая глубина диагностирования λ объекта. Следует определить минимальную совокупность элементарных проверок πj и последовательность их реализации, обеспечивающих заданную глубину диагностирования объекта.
Общее решение указанной задачи может быть выполнено по ТФН, столбцы которой соответствуют множеству технических состояний объекта – исправному е0 и неисправным еj состояниям. Множество П допустимых элементарных проверок πj объекта, соответствующих строкам ТФН, определяется из условия достижения заданной глубины диагностирования объекта.
Чтобы обеспечить требуемую глубину диагностирования, совокупность элементарных проверок алгоритма диагностирования должна различать каждую пару технических состояний объекта диагностирования, принадлежащих разным подмножествам ev и eu, v ≠ µ его состояний, т.е. обладать свойствами обнаружения и различения заданных дефектов объекта.
Внутренние вершины графа представляют собой элементарные проверки (выходные координаты Zj) технического состояния j-х элементов функциональной модели объекта диагностирования, конечные вершины графа отражают те j-е элементы, неисправность которых выявлена, а дуги графа соответствуют результату проверки технического состояния j-го элемента, из вершины которого исходят дуги. Для наглядности конечные вершины графа изображены квадратами с номерами элементов, неисправности которых выявлены, а над дугами указывается исправное (1) или неисправное (0) техническое состояние j-го элемента, из вершин которого исходят дуги.
Определение минимальной совокупности проверок объекта диагностирования позволяет упростить последующую техническую реализацию систему оперативной диагностики, поскольку сокращает число элементов, требующих проверки их технического состояния, без уменьшения требуемой глубины диагностирования
(рис. 3).
Внешний выходной сигнал Z5 соответствует совокупности состояний ЭЭУ:
Ζ5 = ε5 Ζ1 Ζ2 Ζ3 Ζ4 Ζ5. |
(5) |
При неисправности хотя бы одного элемента ЭЭУ неисправен весь объект диагностирования.
Рис. 3. Математическая модель диагностирования ЭЭУ: Z1–Z4 – внутренние результирующие выходные сигналы диагностируемых элементов СГ, трансформатора, ПЧ и ГЭД соответственно
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 494 -
Предложен новый способ диагностирования технического состояния судовой ЭЭУ, основанный на представлении ЭЭУ абстрактной динамической системой, процесс функционирования которой состоит в изменении состояния системы под воздействием внешних и внутренних возмущений. Разработаны алгоритмы диагностирования судовой ЭЭУ, позволяющие обнаруживать неисправности элементов СЭУ с заданной глубиной диагностирования. Данные алгоритмы можно использовать для составления модуля экспертной системы контроля технического состояния судового электрооборудования.
Благодарности
НИР выполнена в рамках проектной части государственного задания в сфере научной деятельности №8.2668.2014/К на кафедре «Электрооборудование, электропривод и автоматика» Нижегородского государственноготехническогоуниверситетаим. Р.Е. Алексеева.
Библиографический список
1.Бублык Б.С. Безопасность мореплавания, технология перевозки грузов. КГАРФ. Петропавловск-Камчатский, 1998. 50 с.
2.Системы электроснабжения на принципах SMART GRID для объектов магистральных газопроводов / А.Б. Васенин, О.В. Крюков, А.В. Серебряков, А.С. Плехов // Автоматизация в промыш-
ленности. 2012. № 4. С. 36–38.
3.Крюков О.В., Серебряков А.В. Метод и система принятия решений по прогнозированию технического состояния электроприводных газоперекачивающих агрегатов // Электротехнические системы и комплексы. 2015. № 4 (29). С. 35–38.
4.Кузнецов С.Е. Основы эксплуатации судового электрооборудования и средств автоматизации. М.: Транспорт, 1991. 231 с.
5.Серебряков А.В. Оптимизация диагностирования электромеханической части ветроэнергетических установок // Электрооборудование: эксплуатация и ремонт. 2013. № 3. С. 39–46.
6.Дифференцирование нагрузки в системах электроснабжения автономных потребителей / А.В. Серебряков, В.Г. Титов, Е.А. Чернов,
А.В. Шахов// Тр. НГТУим. Р.Е. Алексеева. 2015. №2 (109). С. 203–209.
7.Серебряков А.В., Крюков О.В., Васенин А.Б. Диагностика электромеханической части ветроэнергетических установок //
Електромеханiчнi I енергозберiгаючi системи. 2012. № 3 (19).
С. 549–552.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 495 -
УДК 62-531.6
Магнитоэлектрические устройства контроля движения для электропривода исполнительных механизмов
А.Ю. Смирнов, Д.А. Кудряшов, Т.Н. Уснунц-Кригер
Нижегородский государственный технический университет им. Р.Е. Алексеева, Нижний Новгород, Россия
Magnetoelectric motion control devices for the electric drive of actuating units
А.Yu. Smirnov, D.А. Kudryashov, Т.N. Usnunts-Kriger
Nizhny Novgorod State Technical University named after R.E. Alexeev, Nizhny Novgorod, Russian Federation
Рассмотрены конструкции устройств, предназначенных для контроля положения подвижной части исполнительного механизма в электроприводе с бесконтактными синхронными двигателями с частотным управлением. Использование постоянных магнитов в таких устройствах позволяет определять угловое или линейное положение подвижной части исполнительного механизма при больших воздушных зазорах, в частности при герметичном отделении статора от ротора герметизирующей перегородкой. Анализируются датчики насыщения и датчики ЭДС, из которых последние позволяют осуществлять силовое воздействие на подвижную часть привода с целью стабилизации скорости движения.
There have been considered the device complexes to control the rotating part position of the actuating unit electric drive
в частности шаговый и вентильно-индукторный при-
вод [1, 2].
Вразомкнутом шаговом приводе датчик отсутствует,
изаданное положение подвижной части исполнительного механизма обеспечивается количеством импульсов, поданных в фазы обмотки шагового двигателя [3, 4]. В замкнутом приводе оно достигается продолжительностью включения вентильно-индукторного двигателя.
Вобоих вариантах привода необходим контроль за фактическим перемещением подвижной части исполнительного механизма (ИМ) в заданное положение, поскольку в замкнутом приводе возможно перерегулирование, а в разомкнутом– неполное перемещение из-за пропускашаговподвлияниемслучайныхбросковнагрузки.
with no contacting synchronous motors with variable-frequency control. The permanent magnets applications in such devices determines both the angular and linear position of the moving part of the actuating unit at large air gaps in particular at hermetic separation of stator from rotor by a seal partition. There have been analyzed the saturation and sensors and the EMF ones the latter allowing to carry out a power impact on the driver moving part to stabilize the motion speed.
Ключевые слова: бесконтактный синхронный электропривод, шаговый привод, датчик положения, постоянный магнит, генераторная характеристика.
Keywords: generator characteristics, no-contacting synchronous electrical drive, permanent magnet, position sensor, step drive.
ВВЕДЕНИЕ
В современном оборудовании автоматики, телемеханики и различных следящих системах широкое применение получил электропривод с бесконтактными синхронными двигателями с частотным управлением,
I. ДАТЧИКИ ПОЛОЖЕНИЯ
Для определения положения подвижной части механизма применяют датчики различной конструкции. Из них наибольшее распространение получили датчики индуктивного типа как наиболее надежные, долговечные и приспособленные к работе в широком диапазоне температур и частот. Их действие основано на влиянии магнитной проводимости воздушного зазора между статором и ротором, переменной при различных угловых или линейных положениях последнего, на индуктивность обмотки первичного датчика.
Несмотря на упомянутые достоинства, индуктивным датчикам как с вращательным, так и с линейным перемещением подвижной части свойствен серьезный недостаток: при увеличении зазора между статором и ротором у него резко ухудшается чувствительность. Вследствие этого в механизмах с большим зазором, в частности с герметично отделенной подвижной частью от неподвижной, приходится увеличивать габари-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 496 -

ты обмотки или использовать датчики других типов (герконные, пьезоэлектрические), более подверженные воздействию окружающей среды.
Более удачным решением в электроприводе с передачей движения через большие воздушные промежутки между статором и ротором является использование индуктивных датчиков с постоянными магнитами. В зависимости от использования эффекта от воздействия поля постоянных магнитов различают датчики насыщения и датчики ЭДС.
На кольцеобразный сердечник датчика насыщения (рис. 1) намотаны катушки обмотки возбуждения (ОВ)
инескольких, по числу фаз двигателя, сигнальных обмоток. Для электропривода с двух-четырехфазным двигателем их может быть две: синусная (sin) и косинусная (cos). Сердечник навит из ленты ферромагнитного материала, обладающего прямоугольной петлей гистерезиса (пермаллоя).
Обмотка возбуждения получает питание от источника выпрямленного напряжения частотой несколько мегагерц. Катушки синусной и косинусной обмоток намотаны поверх обмотки возбуждения, имеют одинаковые числа витков и чередуются между собой по окружности сердечника. Общее число катушек каждой из этих обмоток равно числу полюсов обмотки якоря двигателя. Такое же число полюсов имеет подвижная часть датчика. Она представляет собой многополюсный постоянный магнит. Его поле проникает в сердечник статора и замыкается в нем в противоположных направлениях: по часовой стрелке или против нее. В той части сегментов сердечника, где поле постоянной составляющей обмотки возбуждения совпадает с направлением поля многополюсного постоянного магнита, материал сердечника дополнительно намагничивается и насыщается. Вследствие насыщения взаимоиндуктивная связь между обмоткой возбуждения и расположенными вблизи катушками синусной или косинусной обмотки оказывается на минимальном уровне. На минимальном уровне оказывается
инапряжение, наведенное переменной составляющей тока возбуждения в обмотке (синусной или косинусной),
катушки которой находятся в области насыщенных сегментов сердечника.
В сегментах сердечника, где поле постоянной составляющей тока обмотки возбуждения направлено встречно потоку полюсов постоянного магнита, сердечник размагничивается. Взаимоиндуктивная связь обмотки возбуждения с расположенными в области этих сегментов катушками синусной или косинусной обмотки возрастает, что вызывает увеличение напряжения, наведенного на этой обмотке переменной составляющей тока обмотки возбуждения.
Поворот магнита вместе с ротором на одно полюсное деление изменяет состояние насыщающихся структур сердечника и обеспечивает смену максимума и минимума напряжения, наведенного в фазах синусной и косинусной обмоток.
II. ДАТЧИКИ – УСТРОЙСТВА КОНТРОЛЯ ДВИЖЕНИЯ
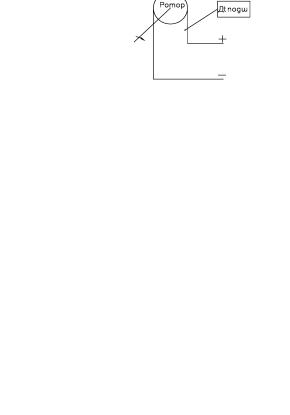
Датчик ЭДС, по сути, представляет собой магнитоэлектрический генератор, снабженный компаратором. Напряжение с генератора подается на гасящий резистор R1, поступает на прямой вход операционного усилителя DA1. На этом входе с помощью диодов VD1 и VD2 в зависимости от угла поворота ротора формируется последовательность положительных и отрицательных полуволн напряжения относительно инверсного входа операционного усилителя DA1. Компаратор преобразует входные напряжения DA1 в последовательность знакопеременных импульсов. Свыхода компаратора импульсы напряжения подаются на вход сумматора (не показан). По количеству импульсов определяются текущий угол поворота ротора генератора и величина перемещения подвижной части исполнительногомеханизма.
Рис. 2. Схема компаратора для определения положения ротора и подвижной части исполнительного механизма
При этом количество импульсов, подаваемых на вход компаратора, не зависит от того, подключена ли к его фазам другая электрическая нагрузка или нет. Следовательно, одну или несколько фаз датчика можно замкнуть на внешнюю цепь.
Тормозящий электромагнитный момент, создаваемый при этом, позволит изменить частоту баланса между вращающим моментом и уравновешивающим его результирующим моментом нагрузки:
|
|
, |
(1) |
Mдв = − |
Mнагр + Mген (Ω) |
Рис. 1. Схема конструкции датчика насыщения
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 497 -
где Mдв – вращающий момент приводного электродвига- |
ψ = arctg |
X1 − XC |
, |
(4) |
||||||||||||||||||
теля; ∑Mнагр – суммарный момент нагрузки, создаваемый |
|
|
|
|
||||||||||||||||||
|
R |
|
||||||||||||||||||||
исполнительным |
механизмом на |
|
валу |
двигателя; |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Mген (Ω ) – электромагнитный момент датчика-генера- |
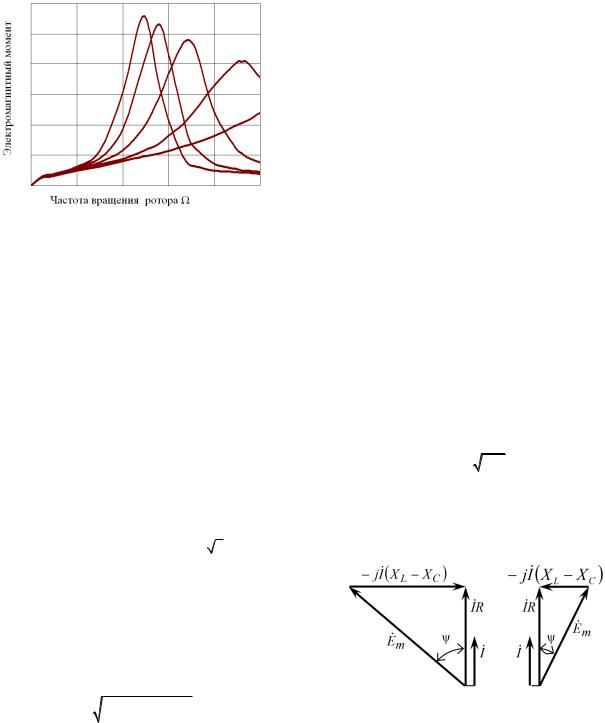
а также падением напряжения на активном İR и индук- |
|||||||||||||||||||||
тора по генераторной характеристике. |
|
|
|
|
|
тивном сопротивлении фазы jİX1. |
|
|
|
|||||||||||||
Генераторная характеристика (рис. 3) представляет |
На низкочастотном участке характеристики ток и элек- |
|||||||||||||||||||||
собой зависимость тормозного электромагнитного мо- |
тромагнитный момент линейно возрастают с ростом часто- |
|||||||||||||||||||||
мента от частоты вращения ротора. |
|
|
|
|
|
ты вращения под влиянием роста ЭДС, реактивный ток |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вцепи является индуктивным (рис. 4, а). На более высоких |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
частотах сказывается влияние компенсации поля реакции |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
якоря конденсаторами, и момент возрастает более интен- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сивно, вплоть до максимума, при котором наступает резо- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нанс напряжений. Этот участок характеристики является |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рабочим. На нем электромагнитный момент устройства |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравновешивает внешний вращающий момент, и движение |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
исполнительногомеханизмастановитсяравномерным. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При дальнейшем разгоне ротора под действием |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
внешнего момента реактивный ток в цепи становится |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
емкостным (рис. 4, б), характеристика переходит на |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ниспадающую ветвь вследствие роста емкостного со- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
противления. Эта ветвь соответствует неустойчивой |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
работе: в теоретически возможном случае преодоления |
||||||||
Рис. 3. Генераторные характеристики |
|
максимума электромагнитного момента под действием |
||||||||||||||||||||
|
какого-либо случайного броска нагрузки происходит |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
При емкостной нагрузке стабилизация частоты вра- |
неуправляемый разгон ротора. |
|
|
|
|
|
||||||||||||||||
щения имеет место на восходящих ветвях характеристик. |
Найденный ток подставляется в уравнение электро- |
|||||||||||||||||||||
магнитного момента: |
|
|
|
|
|
|
|
|
||||||||||||||
При этом большей емкости подключенных конденсато- |
|
|
|
|
|
|
|
|
||||||||||||||
ров соответствует меньшая частота установившегося |
|
mRI |
2 |
|
|
|
|
|||||||||||||||
вращения ротора |
приводного |
двигателя |
и |
связанного |
M = |
, |
|
|
(5) |
|||||||||||||
с ним через механическую передачу скорости враща- |
|
|
Ω |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
тельного или поступательного движения ИМ. |
|
|
|
|
|
|
|
|
|
|
||||||||||||
Таким образом, датчик-генератор способен выпол- |
где m – число фаз обмотки генератора; Ω – частота вра- |
|||||||||||||||||||||
нять не только функцию индикации положения, но и |
щения ротора, рад/с. |
|
|
|
|
|
|
|
|
|||||||||||||
стабилизировать скорость движения заданной величи- |
Частота максимума момента по генераторной ха- |
|||||||||||||||||||||
ной, т.е. является устройством контроля движения, |
рактеристике определяется частотой резонанса напря- |
|||||||||||||||||||||
обеспечивающим силовое воздействие на подвижную |
жений: |
|
|
|
|
|
|
|
|
|||||||||||||
часть ИМ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По рассчитанной известными методами, например |
Ωрез = |
|
|
1 |
|
, |
|
(6) |
||||||||||||||
с использованием |
сеточной |
модели |
|
[5], |
амплитуде |
|
|
|
|
|
|
|||||||||||
|
|
|
Lσ C |
|
||||||||||||||||||
потока взаимной индукции фазы с полем постоянных |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
магнитов и ее индуктивному сопротивлению X1 = ωL1 |
где Lσ – индуктивность рассеяния фазы обмотки, опре- |
|||||||||||||||||||||
определяются |
амплитуда |
и |
действующее значение |
|||||||||||||||||||
ЭДС фазы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
деляющая ее индуктивное сопротивление X1; C – |
ем- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
кость подключенного к обмотке конденсатора, опреде- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
E |
|
= 2πw K |
об |
Ф |
|
f ; E = E |
|
|
/ |
2, |
(2) |
ляющая его емкостное сопротивление XC. Увеличивая |
||||||||||
|
m |
|
к |
|
am |
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
||
а затем амплитуда и фаза тока. В соответствии со схемой замещения, состоящей из последовательно соединенных индуктивного сопротивления фазы, ее активного сопротивления и сопротивления нагрузки, которую для поддержания тока делают емкостной, можно выразить ток фазы, представленный амплитудой
I = |
Em |
(3) |
|
R2 + (X1 − XC )2 |
|||
|
|
и угловым аргументом коэффициента мощности
аб
Рис. 4. Векторные диаграммы генератора с обмотками, замкнутыми на емкостную нагрузку
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 498 -
емкость, можно сдвигать положение максимума момента по генераторной характеристике вниз от исходного. Вследствие увеличения добротности резонансных контуров с увеличением емкости конденсаторов имеет место рост максимума момента (см. рис. 3).
Из изложенного следует, что для достижения наиболее широкого диапазона частот стабилизации скорости движения исполнительного механизма следует уменьшать индуктивность рассеяния Lσ. Достичь этого можно, исключив полюсные наконечники на роторе и применяя открытые пазы на статоре с обмоткой.
Во избежание искажения синусоидальности ЭДС вследствие наложения высших гармоник на кривую распределения индукции в зазоре под влиянием открытых пазов воздушный зазор между статором и ротором устройства должен быть достаточно большим. Исходя из критерия допустимости воздействия поля якоря на поток возбуждения, можно вывести следующее условие для выбора размера воздушного зазора между статором и ротором:
δ ≥ |
αδτAμ0 |
, |
(7) |
|
|
||||
|
2B k |
δ |
|
|
|
δ |
|
||
где αδ – относительная длина полюсной дуги магнитов ротора; τ – длина полюсного деления; А – линейная токовая нагрузка, А/мм; Вδ – индукция в зазоре, Т; kδ – коэффициент воздушного зазора (Картера) [6].
III. РАСЧЕТНО-ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
Экспериментальные исследования изготовленного устройства контроля движения показали, что при выполнении условия (7) и отсутствии глубокого насыщения [7] достигается практически синусоидальная форма ЭДС выходного сигнала датчика. Это обеспечивает надежную работу компаратора (см. рис. 2), вырабатывающего на выходе очередные импульсы напряжения, а также весьма точное определение генераторного момента по векторным диаграммам (см. рис. 4): погрешность расчетного определения генераторного момента не превысила 7,5 % по сравнению с экспериментом. В устройстве использованы дешевые в производстве и устойчивые к воздействию высоких температур магниты на основе феррита [8].
Испытания устройства в составе шагового привода проводились на цифровой модели путем численного интегрирования уравнения движения (1). Вращающий электромагнитный момент двигателя Mдв на каждом шаге интегрирования определялся по его сеточной модели [9].
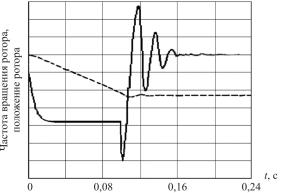
При обесточенном двигателе (0 < t < 0,1 c) ротор первоначально разгоняется под действием потенциальной нагрузки, перемещаемой посредством привода. По истечении около 0,03 с момент от веса подвижных масс уравновешивается электромагнитным моментом устройства контроля движения, и нагрузка опускается равномерно (сплошная кривая на рис. 5). При t = 0,1 c подается команда на останов привода в виде тока в одну
Рис. 5. Осциллограммы движения обесточенного привода с последующим остановом
из фаз шагового двигателя. При этом вследствие неблагоприятных начальных условий по угловому положению ротора (пунктирная кривая на рис. 5) он первоначально получает дополнительный импульс на перемещение нагрузки вниз, ускоряясь до отрицательного максимума, после чего останавливается, совершив несколько колебаний скорости вокруг нулевого значения и пройдя перемещение половину оборота.
ЗАКЛЮЧЕНИЕ
Рассмотренное устройство контроля движения представляет собой синхронную машину с большим зазором, позволяющим отделить ротор от статора посредством герметичной оболочки.
За счет большого зазора подавляются высшие гармоники потока и ЭДС, что делает возможным определять положение ротора посредством счетчика импульсов.
Возможность работы с большим зазором без существенного ущерба для характеристик вращающего момента достигается применением постоянных магнитов из материала с высоким значением коэрцитивной силы.
Устройство можно рекомендовать для использования в ответственных электроприводах, которые должны сохранять способность выполнять наиболее важные функции при полном исчезновении питания: в системах автоматики с жесткими требованиями к функции самохода, крановом оборудовании и на транс-
порте [10, 11].
Благодарности
НИР выполнена в рамках проектной части государственного задания в сфере научной деятельности №8.2668.2014/К на кафедре «Электрооборудование, электропривод и автоматика» Нижегородского государственноготехническогоуниверситетаим. Р.Е. Алексеева.
Библиографический список
1.Чиликин М.Г. Дискретный электропривод с шаговыми двигателями. М.: Энергия, 1971. 624 с.
2.Смирнов А.Ю. Индукторные машины. Проектирование и вычислительный анализ (специальный курс): учеб. пособие для вузов.
М.: Форум, 2015. 192 с.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 499 -
3.Kilthau A., Pacas J.M. Appropriate models for the control of the synchronous reluctance machine // Conference Record of the 2002 IEEE Industry Applications Conference, 37th IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy. 2002. Vol. 4. P. 2289–2295.
4.Position-sensorless control of the transverse-laminated synchronous
reluctance motor / E. Capecchi, P. Guglielmi, M. Pastorelli, A. Vagati // IEEE Transactions on Industry Applications. 2001. Vol. 37, № 6. P. 1768–1776.
IEEE Transaction on Industry Applications. 2015. Vol. 51, № 1.
P. 169–177.
8.Performance of PMASynRM with ferrite magnets for EV/HEV
applications considering productivity / M. Obata, S. Morimoto, M. Sanada, Y. Inoue // IEEE Transactions on Industry Applications. 2014. Vol. 50, № 4. P. 2427–2435.
9.Smirnov A.Yu. Grid models intended for investigating electric drives based on induction motors // Russian Electrical Engineering. 2009. № 2. P. 28–32.
5.Design refinement of synchronous reluctance motors through finite10. Smirnov A.Yu., Usnunts-Kriger T.N. Improvement of motor design
element analysis / A. Vagati, A. Canova, M. Chiampi, M. Pasterolli, M. Repetto // IEEE Transactions on Industry Applications. 2000. Vol. 36, № 4. P. 1094–1102.
for a synchronous drive of an automation system in nuclear-power plants // Russian Electrical Engineering. 2013. Vol. 84, № 9. P. 501–506.
6.Иванов-Смоленский А.В. Электрические машины: учеб. для 11. Синхронные машины для перемещения регулирующих органов
вузов. М.: Энергия, 1980. 928 с. |
ядерных реакторов и методы проверки их состояния / |
7. Ferrari M., Bianchi N., Fornasiero E. Analysis for rotor saturation |
А.Ю. Смирнов, П.А. Доронин, А.Ю. Зимин, Э.А. Смирнов // Из- |
in synchronous reluctance and PM-assisted reluctance motors // |
вестия вузов. Электромеханика. 2014. № 6. С. 22–27. |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 500 -