

Lectures part2
.pdf
|
|
|
|
- 31 - |
|
|
|
|
|
Эта система геометрически неизменяема, но и дополнительных связей (внеш- |
|||||||||
них или внутренних) с точки зрения сопротивления материалов в ней нет. Она |
|||||||||
статически определима, в ней из уравнений равновесия можно найти и усилия в |
|||||||||
опорах и все внутренние усилия. |
|
|
|
|
|||||
A |
E |
D |
Если замкнуть конструкцию, жестко соединив стерж- |
||||||
ни в точке D, то при этом будут наложены две дополнитель- |
|||||||||
P |
|
|
|||||||
Z |
|
ные связи на взаимные перемещения точек D и D* по двум |
|||||||
F |
H |
||||||||
|
декартовым координатам и по взаимному углу поворота се- |
||||||||
|
|
|
|||||||
B |
|
C |
чений, |
т.е. накладываются три дополнительные взаимные |
|||||
G |
связи. |
Получается |
рама |
с |
замкнутым |
контуром |
|||
|
|
||||||||
|
|
|
(см. рис. 19.2). Таким образом, замыкание контура создаёт |
||||||
Рис. 19.6 |
|
три внутренние (взаимные) |
связи. Если же |
соединить |
|||||
|
стержни в точке D через шарнир (рис. 19.5), то будут, оче- |
||||||||
A |
E |
D |
|||||||
видно, добавлены всего две внутренние (взаимные) связи по |
|||||||||
P |
|
|
|||||||
Z |
|
двум координатам. |
|
|
|
|
|||
F |
H |
|
|
|
|
||||
Стержневую систему на рис. 19.5 можно рассматри- |
|||||||||
|
|||||||||
B |
|
C |
вать и как результат постановки шарнира вместо жёсткой |
||||||
G |
связи стержней в узле D конструкции (рис. 19.2). Очевидно, |
||||||||
|
|
что при этом удаляется одна взаимная связь по углу поворо- |
|||||||
|
|
|
|||||||
Рис. 19.7 |
|
та сечений. После постановки шарнира соседние попереч- |
|||||||
|
ные сечения в точке D могут поворачиваться независимо |
||||||||
A |
E |
D |
|||||||
друг от друга. Шарнир, соединяющий два стержня стержне- |
|||||||||
P |
Z |
|
вой системы, называется простым шарниром. Как мы виде- |
||||||
F |
H |
ли, постановка простого шарнира удаляет одну связь. |
|||||||
|
|
|
Шарнир, расположенный в узле, в котором сходится бо- |
||||||
B |
G |
C |
лее двух стержней стержневой системы, назовём сложным |
||||||
|
|
шарниром (рис. 19.6, узел Z). Если расположить три простых |
|||||||
|
|
|
|||||||
Рис. 19.8 |
|
шарнира вместо одного сложного бесконечно близко к узлу Z |
|||||||
|
(рис. 19.7), то можно заметить, что все четыре стержня смогут |
||||||||
свободно поворачиваться друг относительно друга в узле Z, т.е. такой сложный |
|||||||||
шарнир эквивалентен трём простым шарнирам. Отсюда очевидно, что сложный |
|||||||||
шарнир, стоящий в узле, где сходятся n стержней, удаляет n −1 связь, поэтому он |
|||||||||
эквивалентен n −1 простому шарниру. |
|
|
|
|
|||||
|
Проведённые рассуждения позволяют написать общую формулу для оп- |
||||||||
ределения степени статической неопределимости s стерневых систем в плоской |
|||||||||
задаче. Если s1 – степень внешней статической неопределимости, s2 |
– степень |
||||||||
внутренней |
статической |
неопределимости, R – количество опорных связей |
|||||||
(простых опор), K – количество замкнутых контуров, Ш – количество простых |
|||||||||
шарниров в стержневой системе, то |
|
|
|
|
|||||

s1 = R − 3, |
- 32 - |
(19.1) |
|
s2 = 3K − Ш , |
(19.2) |
s = s1 + s2 = R − 3 + 3K − Ш . |
(19.3) |
Замечания: 1. Количество замкнутых контуров определяется, тем сколько раз надо разомкнуть стержни стержневой системы, из которой предварительно удалены внутренние шарниры, чтобы получить незамкнутую, геометрически не- изменяемую конструкцию.
2.В число простых шарниров входят только шарниры, соединяющие стержни самой стержневой системы, и не учитываются шарниры, связывающие конструкцию с опорными устройствами, и шарниры, входящие в изображения опорных устройств.
3.В число простых шарниров входят также простые шарниры, заменяющие сложные шарниры стержневой системы.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
б |
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
||||||||||||
Рис. 19.9
Например, опоры рамы на рис. 19.6 создают пять опорных связей ( R = 5), после удаления шарниров для получения незамкнутой геометрически неизме- няемой конструкции надо четыре раза разомкнуть её стержни ( K = 4 ) (рис. 19.8). Шарнир в точке B, соединяющий раму с опорой, не учитывается, а сложный шарнир в точке Z эквивалентен трём простым шарнирам (Ш = 3),
поэтому степень статической неопределимости этой рамы
S = 5 - 3 + 3× 4 - 3 =11.
|
|
M |
Отметим, что одну и |
ту же |
|
A q |
|
стержневую систему часто |
можно |
||
|
B |
||||
|
|
|
рассматривать или как внешне ста- |
||
1 2 P 3 |
i |
S |
тически неопределимую, если счи- |
||
тать |
дополнительными опорные |
||||
Рис. 19.10 |
|
|
связи, |
или как внутренне статиче- |
|
ски неопределимую, если считать дополнительными внутренние связи. В каче- стве примера показаны один раз статически неопределимая рама (рис. 19.9, а) и
соответствующие ей статически определимые стержневые системы (рис. 19.9, б, в), полученные путем удаления в первом случае внешней связи, а во втором внутренней.
- 33 -
Раскрытие статической неопределимости по методу сил. Канониче-
ские уравнения метода сил
Существуют два основных метода раскрытия статической неопределимо- |
||||||||||||||
сти (помимо различных комбинаций этих методов) – метод сил и метод пере- |
||||||||||||||
мещений. Второй больше используется при расчёте с помощью универсальных |
||||||||||||||
конечно-элементных вычислительных комплексов. Рассмотрим метод сил. |
||||||||||||||
X1 |
X2 q X3 |
Xi |
XS |
|
|
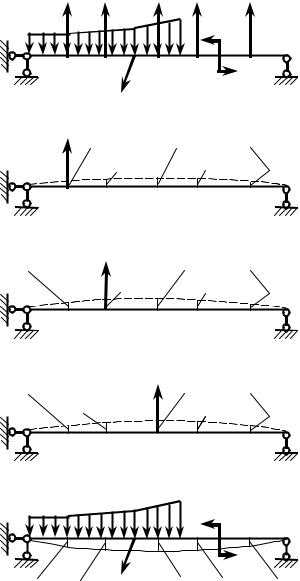
На рис. 19.10 |
изображена ста- |
|||||||
|
тически неопределимая балка. Счи- |
|||||||||||||
A |
|
|
M |
|
B |
|||||||||
|
|
|
|
|
таем, что статическая неопредели- |
|||||||||
1 |
|
P 3 |
i |
|
s |
|
||||||||
2 |
|
|
мость у неё внешняя и степень ста- |
|||||||||||
|
Рис. 19.11 |
|
|
|
тической |
неопределимости |
равна |
|||||||
|
|
|
|
числу |
промежуточных |
шарнирно- |
||||||||
X1 |
1(X1) |
3(X1) |
|
s (X1) |
||||||||||
|
подвижных опор, которые можно, |
|||||||||||||
A |
2(X1) |
|
i (X1) |
B |
очевидно, рассматривать как допол- |
|||||||||
1 |
2 |
3 |
i |
|
s |
|
нительные |
связи. |
Промежуточные |
|||||
|
|
опоры на рисунке пронумерованы. В |
||||||||||||
|
Рис. 19.12 |
|
|
|
||||||||||
|
|
|
|
соответствии с методом сил на осно- |
||||||||||
1(X2 ) X2 |
|
3(X2 ) |
|
s (X2 ) |
||||||||||
(X2 ) |
2 ) |
вании |
аксиомы |
связей |
освободим |
|||||||||
A |
2 |
|
i (X |
B |
конструкцию |
от |
дополнительных |
|||||||
1 |
2 |
3 |
i |
|
s |
|
связей и заменим их неизвестными |
|||||||
|
|
опорными |
|
реакциями |
|
Ri = Xi |
||||||||
|
Рис. 19.13 |
|
|
|
|
|
||||||||
|
|
|
s (X3 ) |
(i =1, 2, ... , s) |
(рис. 19.11). Такая за- |
|||||||||
1(X3 ) |
2(X3 ) |
X3 |
3(X3 ) |
3 ) |
мена вполне эквивалентна при опре- |
|||||||||
A |
|
|
i (X |
B |
делении сил, однако перемещения |
|||||||||
1 |
2 |
3 |
i |
|
s |
|
опорных точек в направлении опор- |
|||||||
|
|
ных связей уже не задаются явно и |
||||||||||||
|
Рис. 19.14 |
|
|
|
||||||||||
q |
|
|
|
можно требовать, чтобы они остава- |
||||||||||
|
|
M |
|
|
лись нулевыми. |
Следует, |
очевидно, |
|||||||
A |
|
|
|
B |
||||||||||
|
|
|
|
|
так подобрать |
величины опорных |
||||||||
|
|
|
|
|
|
|
||||||||
1 |
2 |
3 |
i |
|
s |
|
реакций Xi , |
чтобы перемещения в |
||||||
1P |
2P |
P |
3P |
iP |
sP |
направлении опорных связей |
i бы- |
|||||||
|
ли равны нулю: |
|
|
|
|
|||||||||
|
Рис. 19.15 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
i = 0 |
(i =1, 2, ... , s) . |
(19.4) |
|||||||
|
|
|
|
|
|
|
|
|||||||
Такие уравнения называются условиями совместности деформаций.
Воспользуемся принципом суперпозиции линейных задач и представим каждое из перемещений i как сумму перемещений i (X k ) от отдельных
сил X k , а также перемещения той же точки от внешней нагрузки iP . Напри- мер, для i = 2 перемещение 2 складывается из перемещения в этой точке от
- 34 -
силы X1 (рис. 19.12), от силы X2 (рис. 19.13), от силы X3 (рис. 19.14) и так да- лее. В данном случае перемещение от внешней нагрузки D2P произойдёт в дру- гую сторону (рис. 19.15). Суммарное же перемещение D2 должно оказаться ну-
левым, поскольку в данной точке располагалась опора:
D2 = D2 (X1 )+ D2 (X 2 )+ D2 (X3 )+ ... + D2 (X s )+ D2P = 0 .
В результате соотношения (19.4) можно переписать так:
1 = 1(X1 )+ 1(X 2 )+ 1(X3 )+ ... + 1(X s )+ 1P = 0 ,
D2 = D2 (X1 )+ D2 (X 2 )+ D2 (X3 )+ ... + D2 (X s )+ D2P = 0 ,
............................................................................................
Ds = Ds (X1 )+ Ds (X 2 )+ Ds (X3 )+ ... + Ds (X s )+ D2P = 0 .
Рассмотрим далее любое из перемещений от сил Xi , например
(19.5)
(19.6)
D2 (X1). В ли-
нейной задаче эта функциональная зависимость является линейной, поэтому
D2 (X1 )= aX1 + b . |
(19.7) |
Но в данном случае если X1 = 0 , то и D2 (X1 = 0)= 0, т.е. при нулевой силе пе-
ремещений нет, поэтому b = 0 , и тогда перемещение пропорционально прикла- дываемой силе:
D2 (X1)= aX1 . |
(19.8) |
Если теперь предположить, что |
X1 =1, то получаем физический смысл |
коэффициента a, это есть перемещение точки 2 конструкции на рис. 19.12 в на-
правлении опорной связи с тем же номером от силы X1 =1: |
|
D2 (X1 =1)= a ×1 = a . |
(19.9) |
Для коэффициента a введём новое обозначение: |
|
d21 = a . |
(19.10) |
Здесь использованы индексы левой части равенств (19.8), (19.9), первый из них указывает место и направление перемещения, второй – силу, вызывающую пе- ремещение. Введем аналогичные обозначения для других коэффициентов и за- пишем подобно (19.8)
Di (X k )= dik X k . |
(19.11) |
В этих рассуждениях есть одна тонкость, на которую надо обратить внима- ние. Из равенства (19.9) можно увидеть, что величины D2 (X1 =1) и d21 = a отли-
чаются друг от друга на размерную единицу силы. Другими словами, эти вели- чины равны численно, но отличаются друг от друга размерностью. Первая ве- личина имеет размерность перемещения (длины) [м], размерность второй – пе- ремещение, деленное на силу [м Н]. Обозначим
Н]. Обозначим
Di (X k =1)= a ×1 = d*ik , |
(19.12) |
где d*ik имеет размерность перемещения.

- 35 -
Коэффициенты d*ik представляют собой перемещения заданных точек из- вестной конструкции в известном направлении от сил, равных единице. Поэтому они могут быть найдены тем или иным способом. То же можно сказать и о сла- гаемых iP . Cилы для их определения также известны, хотя и не равны единице. Они представляют собой активную нагрузку исходной конструкции. Наиболее естественно использовать для определения величин d*ik и iP интеграл Мора.
Если известны величины d*ik , то известны и величины δik . Перепишем
(19.6), учтя формулы (19.11). Получим соотношения, которые можно рассматри- вать как систему линейных алгебраических уравнений для определения сил Xi
ì d X |
1 |
+ d X |
2 |
+d X |
3 |
+ ... + d |
X |
s |
+ D |
1P |
= 0 , |
|
|
ï |
11 |
12 |
13 |
1s |
|
|
|
|
|||||
ïd21X1 + d22 X 2 |
+ d23 X3 |
+ ... + d2s X s + D2P = 0 , |
(19.13) |
||||||||||
í |
.......................................................................... , |
||||||||||||
ï |
|
||||||||||||
ï |
|
|
+ ds2 X 2 |
+ ds3 X3 + ... + dss X s |
+ DsP |
= 0 . |
|
||||||
î ds1X1 |
|
||||||||||||
Эта система уравнений носит название канонической, от греческого слова «ка- нон» – правило, поскольку уравнения составляются по единым правилам, кото- рые вытекают из физического смысла уравнений и входящих в них коэффици- ентов. В канонической системе уравнений количество неизвестных и число уравнений равны степени статической неопределимости s, т.е. уравнений дос- таточно для определения неизвестных.
При выводе этой системы уравнений рассматривались шарнирно под- вижные опоры, накладывающие связи по перемещениям. Ничего в рассуждени- ях не изменится, если какие-то из опор накладывают ограничения по углам по- ворота. Им будут соответствовать неизвестные моменты. Тогда вместо пере- мещения можно использовать понятие обобщённого перемещения, а вместо силы – понятие обобщённой силы.
Когда обобщённые силы найдены, говорят, что статическая неопредели- мость раскрыта. Дальнейшее решение проводится обычным способом для ста- тически определимой эквивалентной системы, в активной нагрузке которой уже нет неизвестных сил.
|
|
|
Основная и эквивалентная системы в методе сил |
||
A |
B |
Основной системой называет- |
|||
ся исходная стержневая система |
|||||
|
|
|
|
|
|
|
без нагрузки и без дополнительных |
|
|
||
|
||
|
||
Рис. 19.16 |
связей. Именно к основной системе |
|
прикладывались силы от отброшен- |
||
|
ных связей и внешняя нагрузка исходной конструкции при получении системы
- 36 -
канонических уравнений (см. рис. 19.12 – 19.15), т.е. основной системой в пре- дыдущем примере была конструкция на рис. 19.16.
Эквивалентной системой называется основная система, к которой при- ложена активная нагрузка исходной конструкции и обобщённые силы от от-
A |
B |
брошенных дополнительных связей. |
|||||
Эквивалентная система |
представ- |
||||||
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
ляет собой результат |
применения |
|
|
|
|
|
|
|||
|
|
|
Рис. 19.17 |
аксиомы связей к дополнительным |
|||
|
|
|
связям исходной конструкции. Экви- |
||||
A |
B |
||||||
валентная система, использовавшая- |
|||||||
|
|
|
|
|
|
|
|
|
ся в предыдущем примере, изобра- |
|
Рис. 19.18 |
жена на рис. 19.11. |
|
Каждой основной системе со- |
||
|
ответствует одна эквивалентная система, они образуют пару. Основных и экви-
валентных систем для одной и той же статически неопределимой конструкции можно указать много. Для балки на рис. 19.10 основными системами являются, например, балки на рис. 19.17 и 19.18. Результаты расчёта не зависят, конечно, от того, какая эквивалентная система выбрана, однако от выбора основной и, следовательно, эквивалентной систем может сильно зависеть трудоёмкость расчёта. Причём именно для балки на рис. 19.10 существует оптимальная ос- новная система, при использовании которой трудоёмкость расчёта данной бал- ки снижается очень значительно. Она будет рассмотрена ниже.
При выборе основной системы нужно следить за тем, чтобы получающая- ся система была геометрически неизменяема. Поэтому нельзя убирать единст- венную горизонтальную опорную связь в рассмотренном примере.
M |
M/2 X2 |
|
X2 M/2 |
M/2 |
X3 |
M/2 |
P |
X1 |
X1 |
P/2 |
P/2 |
X3 |
P/2 |
P/2 |
|
Рис. 19.19
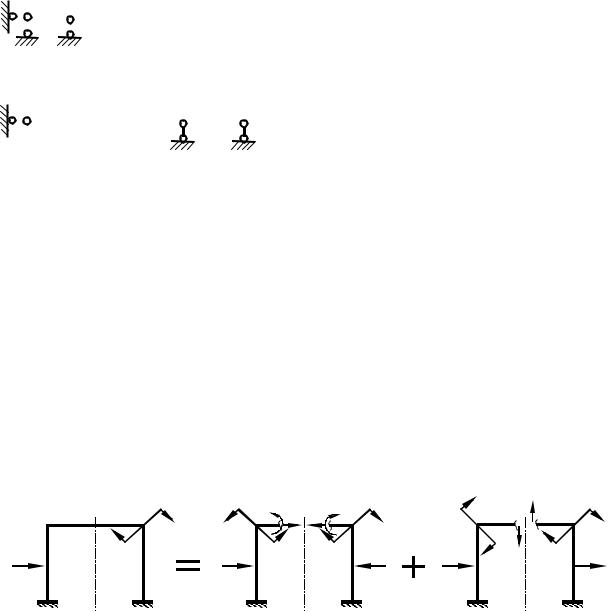
Если в исходной конструкции есть симметрия, то при выборе основной системы её лучше сохранить. Трудоёмкость расчёта от этого уменьшится, по- скольку симметрию можно учесть при решении статически неопределимой за- дачи. В симметричной стержневой системе на оси симметрии при симметрич- ной нагрузке обращаются в нуль кососимметричные внутренние силовые фак- торы (поперечная сила Qy ), а при кососимметричной нагрузке – симметричные внутренние силовые факторы (осевая сила N и изгибающий момент Mz ). Дан-
- 37 -
ное обстоятельство при расчете статически неопределимых систем позволяет, выбрав основную систему путем разреза по оси симметрии, сразу исключить из числа искомых неизвестных соответствующие нулевые обобщенные усилия. Кроме того, отметим, что любая нагрузка в симметричной системе может быть представлена в виде суммы симметричной и кососимметричной составляющих.
На рис. 19.19 показан пример симметричной трижды статически неопре- делимой рамы и эквивалентные ей системы, соответствующие симметричной и кососимметричной составляющим приложенной нагрузки. Вместо одной общей системы трёх канонических уравнений в этом случае получатся две более про- стые системы из одного и двух уравнений, которые легче решаются. Общее решение может быть получено далее по принципу суперпозиции.
Вычисление коэффициентов канонической системы уравнений
Коэффициент левой части системы канонических уравнений δik , как уже говорилось, численно совпадает с обобщённым перемещением d*ik точки ос- новной системы с индексом i, в направлении отброшенной опорной связи с тем же индексом, от действия единичной обобщённой силы с индексом k. Такие обобщённые перемещения удобно искать с помощью интеграла Мора. Для это- го в основной системе следует получить эпюры от единичной обобщённой си- лы Xk =1, которая в данном случае является нагрузкой конструкции. Для опре-
деления перемещения заданной точки в заданном направлении в этом направ- лении следует приложить новую единичную нагрузку. Эта единичная нагрузка будет направлена, как и сила Xi , поэтому можно сказать, что вторые эпюры в интеграле Мора следует искать от силы Xi =1. После этого для определения
коэффициента следует вычислить интеграл Мора (который записываем для ба- лок при изгибе и плоских рам, пренебрегая влиянием на деформации осевых и перерезывающих сил):
j =n |
é |
~ |
~ |
ù |
|
|
d*ik = å |
ò ê |
M k (x)Mi (x) |
ú |
dx , |
(19.14) |
|
|
||||||
j =1 l j ë |
|
EI |
û j |
|
|
|
где волной, как и раньше, помечены эпюры моментов от единичных обобщён- ных сил.
Из полученного равенства видно:
d*ik = d*ki , |
(19.15) |
поскольку смена порядка индексов вызывает только перестановку сомножите- лей в интеграле Мора. Равенство этих коэффициентов следует и из теоремы взаимности перемещений, так как в данном случае речь идёт о равных силах, они обе единичные. При равенстве коэффициентов (19.15) матрица коэффици-
- 38 -
ентов левой части системы канонических уравнений будет симметричной. Ко- эффициенты главной диагонали оказываются всегда положительными, по- скольку вычисляются по квадратам эпюр. Побочные же коэффициенты могут быть как положительными, так и отрицательными, как и свободные члены ip .
Каждый из коэффициентов ip представляет собой обобщённое переме-
щение точки основной системы с индексом i, в направлении отброшенной опорной связи с тем же индексом, от действия активной нагрузки исходной статически неопределимой конструкции. При вычислении этих коэффициентов также удобнее всего пользоваться интегралом Мора. Для этого потребуются эпюры от нагрузки исходной конструкции в основной системе и эпюры от еди- ничной обобщенной силы в i-ой. Если не учитывать осевые и перерезывающие силы, то для интеграла Мора потребуются только эпюра моментов от нагрузки исходной конструкции, которую обозначим M p (x), а также уже использовавшая-
|
|
|
|
|
~ |
|
|
ся эпюра моментов от единичного нагружения Mi (x): |
|
||||||
j =n |
é |
|
~ |
ù |
|
|
|
M P (x)Mi (x) |
|
|
|||||
DiP = å |
ò ê |
ú |
dx . |
(19.16) |
|||
|
|||||||
j =1 l j ë |
EI |
|
û j |
|
|
||
Таким образом, для вычисления всех коэффициентов потребуется s +1
~ ( ) ( )
эпюра: это s эпюр Mi x и эпюра M p x , все для основной системы.
Алгоритм решения статически неопределимой задачи методом сил
1.По числу дополнительных связей и (или) по формуле определить сте- пень статической неопределимости.
2.Выбрать основную систему, удалив нагрузку и дополнительные связи.
3.Сформировать эквивалентную систему, приложив к выбранной основ- ной системе нагрузку исходной конструкции и неизвестные силовые факторы, заменяющие воздействие отброшенных связей.
4.Составить систему канонических уравнений и вычислить её коэффициенты.
5.Решить систему канонических уравнений и определить усилия от до- полнительных связей.
6.Решить статически определимую задачу для эквивалентной системы.
7.Проверить решение статически неопределимой задачи с помощью ста- тической и деформационной проверок.
Статическая и деформационная проверка правильности решения статически неопределимой задачи
Решение статически неопределимой задачи представляет собой длинную последовательность вычислений, поэтому появление ошибок весьма вероятно.

- 39 -
Вполне доверять результату можно только после всесторонней проверки решения. Для статически неопределимой задачи можно выполнить два вида проверок.
Статическая проверка заключается в проверке условий равновесия как всей системы в целом, так и любой ее части. Отдельным её этапом является, например, проверка равновесия узлов. К статической проверке следует отнести и все прочие способы проверки правильности построения эпюр, рассматривав- шиеся нами ранее. Статическая проверка является необходимым, но недоста- точным условием того, что построенные эпюры правильны. Эта проверка не проверяет правильность определения неизвестных обобщённых сил канониче- ской системы уравнений.
Деформационная (кинематическая) проверка заключается в проверке со-
блюдения условий совместности деформаций. Выполнение её проверяет реше- ние всей статически неопределимой задачи в целом. Проверка основана на оче- видном утверждении, что обобщённые перемещения исходной статически не-
определимой задачи должны быть равны нулю в направлении всех наложенных связей.
RA |
|
|
X1 |
X2 |
|
|
|
|
X3 |
|
|
|
|
|
|
|
RB |
|
Будем для примера считать, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
что статическая |
неопределимость |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
A q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
внешняя, тогда обобщенные пере- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мещения должны быть равны нулю в |
|
|
|
|
|
|
1 |
2 |
|
P 3 |
|
i |
|
s |
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
направлении всех опорных связей. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Рис. 19.20 |
|
|
|
|
|
Однако вычислить |
перемещения в |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
направлении связей, если они нало- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
XA = 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
жены, нельзя. Надо применить ак- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
сиому связей и заменить связи реак- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
циями. Все силы в конструкции уже |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
s |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
известны, от них она должна дефор- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 19.21 |
мироваться так же, как исходная за- |
|
креплённая конструкция, если силы |
||
|
определены правильно. Но конструкция окажется незакреплённой, и её пере- мещения снова не удастся найти. Необходимо конструкцию закрепить, оставив в ней минимально необходимое число связей.
Можно, конечно, при проверке выбрать то же закрепление, что и в реше- нии задачи, т.е. использовать прежнюю основную систему, но тогда решение будет в значительной степени повторяться и проверка будет неполной. Лучше выбрать новый способ закрепления, взять новую основную (например, рис. 19.18) и соответствующую ей эквивалентную систему (рис. 19.20). Обоб- щённые перемещения в направлении вновь отброшенных связей в новой экви- валентной системе тоже должны быть нулевыми. Это и можно проверить с по-
- 40 -
мощью интеграла Мора, найдя эпюры от единичных нагружений в направлении вновь отброшенных связей (рис. 19.21) и найдя затем интеграл от выражений для этих эпюр и выражений для эпюр проверяемого решения. Последние уже известны из проверяемого решения задачи.
Последовательность действий для выполнения деформационной проверки при решении плоских задач с использованием упрощенной записи интеграла Мора (без осевых и перерезывающих сил) будет следующей:
1.Выбрать новые, отличные от использовавшихся в решении задачи ос- новную и эквивалентную системы.
2.Приложить к основной системе единичную нагрузку в направлении обобщённой связи, которая не отбрасывалась при решении задачи, и найти эпюру моментов от единичного нагружения.
3.Вычислить интеграл Мора для эпюры моментов от этого единичного нагружения и итоговой эпюры моментов проверяемого решения, он должен
дать нулевое обобщенное перемещение в направлении действия отброшенной обобщённой связи.
Проверка будет более полной, если проверить равенство нулю перемеще- ний в направлении не одной, а нескольких или всех дополнительных связей.