

Трехмерные преобразования
ВВЕДЕНИЕ
В трехмерном
пространстве также можно ввести
однородные координаты так, что точке
![]() будет соответствовать бесконечное
множество точек
будет соответствовать бесконечное
множество точек![]() четырехмерного пространства, гдеh-любое
ненулевое число. Мы рассмотрим некоторые
элементарные преобразования в трехмерном
пространстве и выпишем соответствующие
им матрицы преобразований.
четырехмерного пространства, гдеh-любое
ненулевое число. Мы рассмотрим некоторые
элементарные преобразования в трехмерном
пространстве и выпишем соответствующие
им матрицы преобразований.
ПОВОРОТЫ ВОКРУГ ОСЕЙ
В отличие от
двумерного случая в трехмерном имеется
три основных поворота – вокруг оси X,
вокруг оси Y
и вокруг оси Z.
Вращение пространства вокруг оси Z
на угол
![]() против часовой стрелки (если смотреть
с конца вектораZ)
соответствует повороту в плоскости XY.
При этом координата z
не меняется, поэтому матрица такого
вращения имеет вид
против часовой стрелки (если смотреть
с конца вектораZ)
соответствует повороту в плоскости XY.
При этом координата z
не меняется, поэтому матрица такого
вращения имеет вид
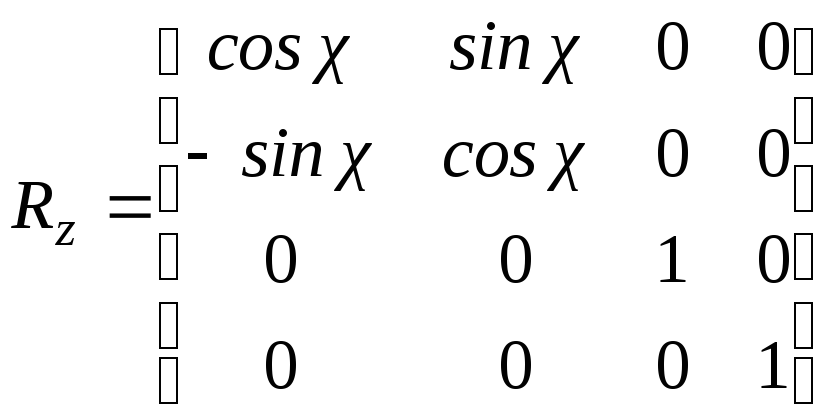 .
(3-1)
.
(3-1)
Вращение против
часовой стрелки вокруг оси X
на угол
![]() соответствует повороту в плоскостиYZ.
То есть это вращение полностью аналогично
предыдущему с точностью до переименования
осей
соответствует повороту в плоскостиYZ.
То есть это вращение полностью аналогично
предыдущему с точностью до переименования
осей
![]() .
Поэтому, переставляя соответствующим
образом (а именно,
.
Поэтому, переставляя соответствующим
образом (а именно,![]() )
строки и столбцы матрицы (3-1), получим
матрицу:
)
строки и столбцы матрицы (3-1), получим
матрицу:
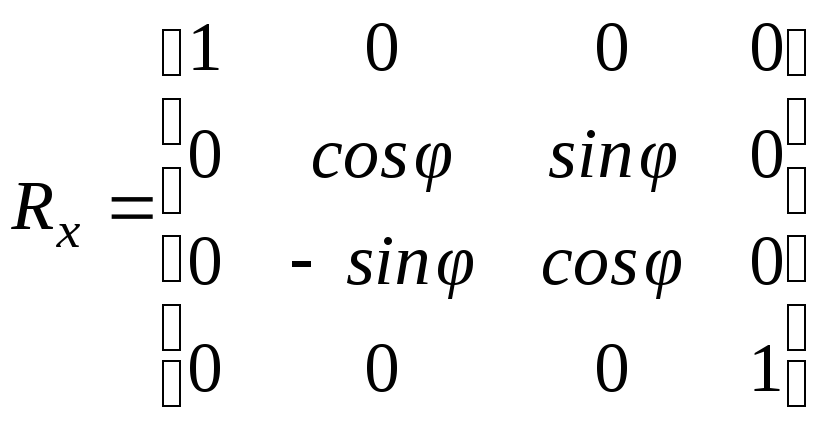 .
(3-2)
.
(3-2)
Аналогично, матрица
поворота вокруг оси Y
на угол
против часовой стрелки получается из
матрицы (3-1) следующей перестановкой
строк и столбцов:
![]() .
В результате получаем матрицу
.
В результате получаем матрицу
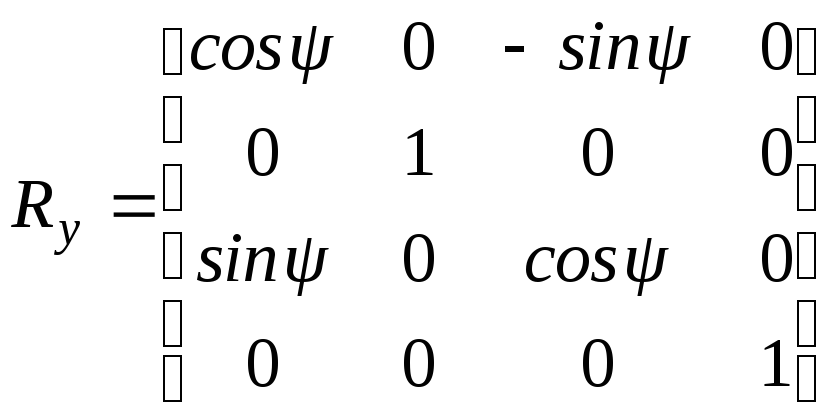 .
(3-3)
.
(3-3)
РАСТЯЖЕНИЕ ВДОЛЬ ОСЕЙ
Растяжение (сжатие) вдоль осей X, Y, Z с коэффициентами соответственно a, b, c > 0 осуществляется с помощью матрицы следующего вида
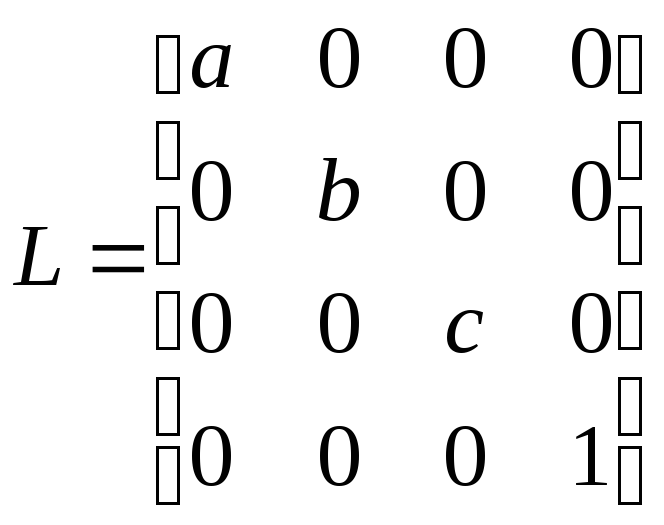 .
(3-4)
.
(3-4)
ОТРАЖЕНИЕ ОТНОСИТЕЛЬНО ПЛОСКОСТЕЙ
При отражении, например, относительно плоскости XY координаты x и y не изменяются, а координата z меняет знак. Аналогичная ситуация при отражении относительно других плоскостей: YZ и ZX. Поэтому соответствующие матрицы будут иметь вид:

Перенос (сдвиг)
Матрица переноса (сдвига) пространства на вектор d = (d1, d2, d3) имеет вид
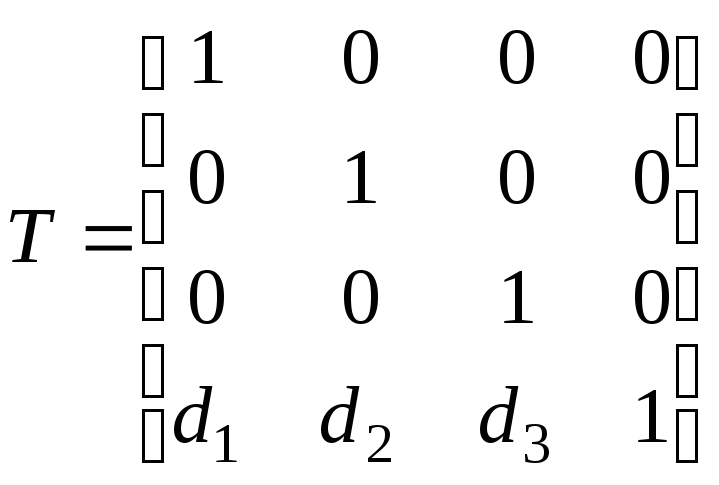 .
(3-5)
.
(3-5)
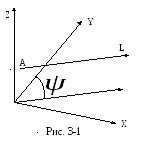
Пример 3-1 Комбинированное преобразование
Рассмотрим пример
более сложного преобразования, которое
мы представим в виде последовательности
элементарных преобразований. Пусть
требуется построить матрицу M
вращения пространства на угол
![]() вокруг прямойL,
проходящей через точку A(a,b,c)
и имеющей единичный направляющий вектор
(l,n,0),
то есть параллельный плоскости XY
(рис. 3-1).
вокруг прямойL,
проходящей через точку A(a,b,c)
и имеющей единичный направляющий вектор
(l,n,0),
то есть параллельный плоскости XY
(рис. 3-1).
Задача сводится к последовательному применению следующих элементарных преобразований:
сделаем так, чтобы прямая L проходила через начало координат. Для этого надо осуществить перенос пространства на вектор –A=(-a, -b, -c). Соответствующая матрица преобразования имеет вид:
 .
.
совместим прямую L с осью Y. Для этого выполним поворот пространства на угол
 (который надо еще вычислить) вокруг осиZ.
Зная направляющий вектор (l,
n,
0) прямой L,
получаем для угла
(который надо еще вычислить) вокруг осиZ.
Зная направляющий вектор (l,
n,
0) прямой L,
получаем для угла
 :
: Соответствующая матрица имеет вид:
Соответствующая матрица имеет вид:
 .
.
повернем пространство на угол
 вокруг прямойL.
Так как теперь прямая L
совпадает с осью Y,
то это будет поворот вокруг оси Y
и соответствующая матрица (см. 3-3) будет
следующей:
вокруг прямойL.
Так как теперь прямая L
совпадает с осью Y,
то это будет поворот вокруг оси Y
и соответствующая матрица (см. 3-3) будет
следующей:
 .
.
восстановим исходное направление прямой L. Для этого выполним поворот на угол
 вокруг осиZ.
Матрица преобразования будет обратной
к матрице Rz
и получается из нее заменой угла
вокруг осиZ.
Матрица преобразования будет обратной
к матрице Rz
и получается из нее заменой угла
 на
на .
Отсюда получаем:
.
Отсюда получаем:
 .
.
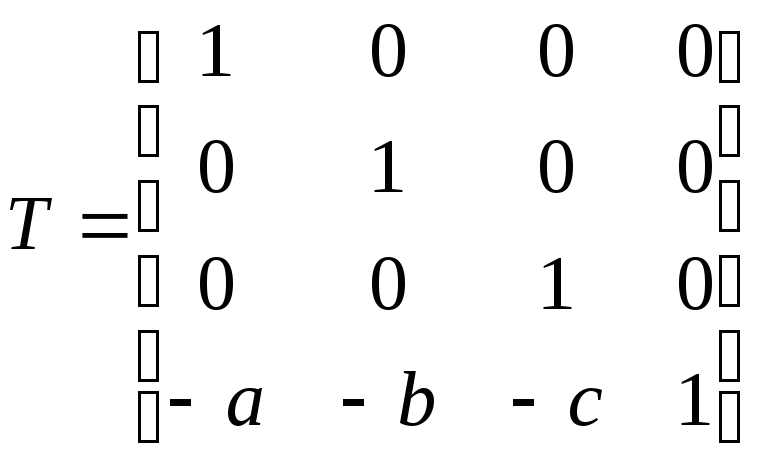
восстановим исходное положение прямой L. Для этого осуществим перенос на вектор A=(a, b, c). Соответствующая матрица T-1 будет обратной к матрице T:
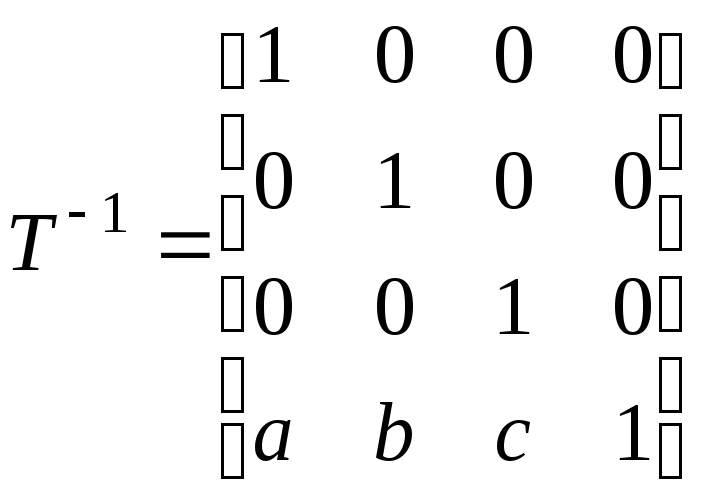 .
.
Окончательная
матрица заданного преобразования будет
равна произведению матриц использованных
элементарных преобразований, то есть
![]() .
Например, при
.
Например, при
П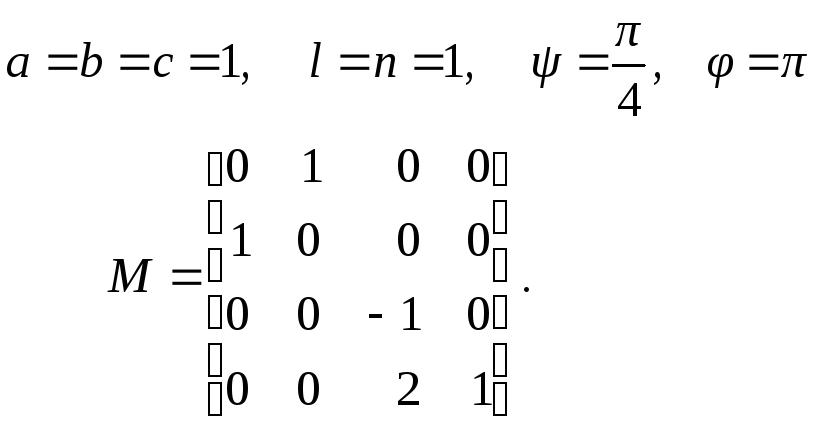 ри
произвольных параметрах получается
довольно громоздкое выражение.
ри
произвольных параметрах получается
довольно громоздкое выражение.
ЛИТЕРАТУРА
Роджерс Д., Адамс Дж. Математические основы машинной графики/Пер. с англ.-М.: Машиностроение,2000.-240с.
Воеводин В.В. Линейная алгебра/-М.:Наука, 1980.
Курош А.Г. Курс высшей алгебры/-М.: 1962.
Содержание