

книги / Управление большими системами. УБС-2017
.pdfИнформационные технологии в управлении техническими системами и технологическими процессами
Наиболее точным в лабораторных условиях оказался фильтр Kuwahara, особенно в сером градиенте, что используется достаточно часто. Дополнительным «бонусом» является побочная чистка изображения от графического шума, что избавляет от необходимости дополнительной обработки входных данных.
Фильтр Kuwahara выполняет нелинейную фильтрацию изображений с сохранением резких краев. После фильтрации изображение похоже на грубо нарисованную красками картину. Суть алгоритма состоит в следующем (рис. 2):
1. В окрестности каждого пикселя применить маску размером .
2.Окрестность разделить на четыре области, указанные цифрами I, II, III, IV, размером r * r.
3.Вычислить среднюю интенсивность и дисперсию в каждой из областей I, II, III, IV.
4.Присвоить центральному пикселю X среднее значение интенсивности той области, дисперсия которой наименьшая.
Рис. 2. Маска фильтра
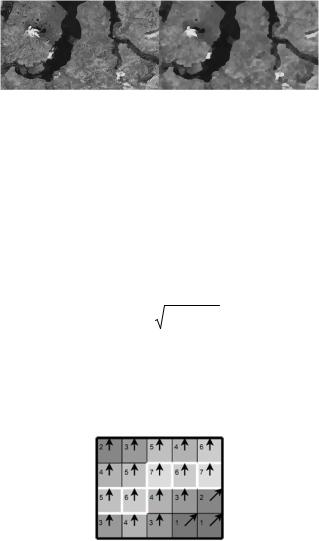
Применение выбранного фильтра освобождает от необходимости предварительного очищения изображения от шумов, забирая эту функцию на себя. Причём информация о границах объектов в изображении будет сохранена. Применяем к исходному изображению фильтр Kuwahara. На рис. 3 слева показано исходное изображение, а на рис. 3 справа – изображение после применения фильтра Kuwahara.
Хорошо видно, что контуры изображения стали наиболее заметны и к данному рисунку возможно применить контурный фильтр. В данном случае будем использовать детектор границ Кэнни [1], использующий, в свою очередь, фильтр Собеля.
563
601
Управление большими системами. Выпуск XX
Рис. 3. Исходное изображение (слева) и рисунок, обработанный фильтром Kuwahara (справа)
Для функционирования оператора требуется две матрицы. По ним к входному изображению применяется свертка
−1 −2 −1 |
−1 |
0 |
1 |
|
Gy =(0 |
0и 0)*A, |
Gx = (− 2. 0 |
2)* A |
|
1 |
2 1 |
−1 |
0 |
1 |
В каждой точке изображения приближенное значение градиента можно вычислить, используя полученные приближенные значения производных по следующей формуле:
(1) |
G = Gx |
2 + Gy |
2 , |
где А – исходное изображение; Gx и Gу – результат (число) опе-
рации свертки по выбранным матрицам, а знак * обозначает саму двумерную операцию свертки. При этом считается, что координата х возрастает слева направо, а у – сверху вниз.
Рис. 4. Принцип подавления границ
Действие алгоритма сводится к тому, что вначале производится поиск градиентов, т.е. границы будут отмечаться там, где градиент изображения приобретает максимальное значение.
564
602

Информационные технологии в управлении техническими системами и технологическими процессами
Только локальные максимумы будут отмечены как границы, а потенциальные границы будут определены порогами. Итоговые границы определяются путем подавления всех краев, не связанных с определенными (сильными) границами. Принцип такого подавления проиллюстрирован на рис. 4. Таким образом, из исходногоизображениябудетполученегоконтурныйвариант.
На рис. 5 показан конечный результат изображения. Полученные контуры продемонстрированы на снимке печени как пример применения алгоритмов. Следует обратить внимание, что в данном случае также применен фильтр по минимальному радиусу и позиционированию контура для отсечения ложных выделений. Но только получить данный контур недостаточно. Его нужно представить в виде кода, который можно было бы хранить.
Рис. 5. Пример работы оператора Кэнни
Один из наиболее используемых методов кодирования контуров – цепной код Фримена. Цепные коды применяются для конвертации границы в последовательность прямых определенной длины и указателя направления. В основе этого лежит 2- или 3-битная решетка на 4 и 8 направления соответственно. Длина определяется разрешением решетки, а направление – указателем из решетки (рис. 6).
565
603

Управление большими системами. Выпуск XX
Рис. 6. Цепной код Фримена
На контуре фиксируется точка, которая называется начальной точкой. Затем контур обходится, и каждый вектор смещения записывается комплексным числом a+ib, где a – смещение точки по оси X, а b – смещение по оси Y. Смещение берется относительно предыдущей точки. При таком подходе контур определяется как совокупность элементарных векторов, представленных своими двумерными координатами. Изменение начальной точки приведет к циклическому сдвигу вектора-контура, а изменение масштаба изображения можно рассматривать как умножение элементарного вектора на масштабный коэффициент.
Скалярным произведением контуров N1 и N2 называется такое комплексное число[2]
|
k −1 |
(2) |
η = ( N 1, N 2) = (γ n , vn ) , |
n = 0
где k – размерность вектора-контура; γ n – n-й элементарный вектор контура N2; vn – n-й элементарный вектор контура N1, (γ n ,vn ) – скалярное произведение комплексных чисел, вычисляемых как
(3)(a+ib,c+id) = (a+ib)(c−id) = ac+bd+i(bc−ad).
Действительная часть скалярного произведения комплексных чисел совпадает со скалярным произведением соответст-
566
604
Информационные технологии в управлении техническими системами и технологическими процессами
вующих векторов, т.е. включает в себя векторное скалярное произведение. Чем больше значение скалярного произведения, тем «ближе» векторы друг к другу. Для перпендикулярных векторов оно будет равно нулю, станет отрицательным для векторов, направленных в разные стороны, а для коллинеарных – будет иметь максимальное значение.
Нормированное скалярное произведение (НСП), определяемое в пространстве комплексных чисел, также является комплексным числом. При этом, единица – это максимально возможное значение модуля НСП и она достигается только при выполнении определенного условия.
(4) |
η = |
(N 2, N1) |
, |
|
| N 2 || N1| |
||||
|
|
|
где |N1| и |N2| – нормы (длины) контуров, которые вычисляются как
|
k−1 |
1 |
|
(5) |
| N 2 |= ( | γ n |2 )2 |
, |
|
|
n=0 |
|
|
(6) |
N 2 = μN1, |
|
|
где μ – произвольное комплексное число.
Исходя из физического смысла умножения комплексных чисел, получаем вывод, что модуль НСП достигнет максимального значения – единицы, только если контур N2 является тем же контуром N1, даже если он будет повернут на некоторый угол и промасштабирован на определенный коэффициент.
Но равенство (6) достигается только тогда, когда начальные точки контуров совпадают. В противном случае, даже если контуры одинаковы, модуль НСП таких контуров не будет равен единице. Для решения этой проблемы можно воспользоваться взаимокорреляционной функцией (ВКФ) двух контуров, значения которой показывают степень похожести контуров, если сдвинуть начальную точку N на m позиций:
(7) τ (m) = (N 2, N1(m)) ,
где N1(m) – контур, полученный из N1 путем циклического сдвига его элементарного вектора на m элементов. ВКФ определена на всем множестве целых чисел, но поскольку цикличе-
567
605
Управление большими системами. Выпуск XX
ский сдвиг на k приведет к исходному контуру, ВКФ имеет период k и нужно рассмотреть значения этой функции только в пределах от 0 до k–1.
Максимальный модуль среди значений ВКФ в показывает степень похожести контуров (достигает единицы для одинаковых контуров), а аргумент arg(τ max) дает угол поворота одно-
го контура относительно другого. |
|
|||
(8) |
τ max = max( |
τ (m) |
) , |
|
| N 2 || N1| |
||||
|
|
|
||
где τ (m) – |
модуль ВКФ; |N1| и |N2| – нормы (длины) контуров, |
|||
определяемые формулами (5) и (6). |
|
|||
3. Заключение
Предложен гибридный метод распознавания контуров на изображении, включающий три основных этапа: размытие, выделение границ, сохранение границ. Данный подход был использован при решении задачи выделения границ печени человека, в которой условия работы алгоритма были наиболее сложными ввиду наличия малоразличимых градаций серого на снимках. Однако при подобном подходе все еще остается сложность определения того, что именно выделять, в случае если нам нужен только один контур, как в примере поиска органа человека. В случае если существует два контура этого же органа на снимке, данный подход не сработает ввиду ограничения только на один контур из-за схожего контура селезенки. Так или иначе эта проблема осталась открытой и требует дальнейшего рассмотрения.
Исследование проводилось при финансовой поддержке Министерства образования и науки РФ в рамках проекта RFMEFI58617X0055. Название совместного проекта с ЕС в рамках программы "Горизонт 2020" : "Fracture across Scales and Materials, Processes and Disciplines" Акроним проекта: “FRAMED”.
568
606
Информационные технологии в управлении техническими системами и технологическими процессами
Литература
1.ГОНСАЛЕС Р., ВУДС Р. Цифровая обработка изображений. –
М.: Техносфера, 2005.
2.ВАНЮКОВА Д.И., ПОПОВ С.С., СОКОЛОВ П.А. Совмеще-
ние цифрового картографического изображения местности с радиолокационным изображением [Электронный ресурс] //
Навигация и управление движением: материалы XVI конференции молодых ученых. – Санкт-Петербург, 2014, Март. – URL: http://www.elektropribor.spb.ru/kmu2014/refs (дата обращения: 10.07.2017).
3.ЯСНИЦКИЙ Л.Н. Введение в искусственный интеллект: учеб. пособие для студ. высш. учеб. заведений. – М.: Ака-
демия, 2010. – 176 с.
DEVELOPMENT OF THE PROTOTYPE OF THE AUTOMATED DECISION SUPPORT SYSTEM FOR DECOMPOSITION WHEN SEARCHING FOR CONTOURS ON DICOM FORMAT IMAGES
Roman Klestov, Perm National Research Polytechnic University, Perm, student (klestovroman@gmail.ru).
Valeriy Stolbov, Perm National Research Polytechnic University, Perm, Doctor of Science, professor (valeriy.stolbov@gmail.com).
Abstract: A hybrid method for recognizing contours, which includes several stages of processing the original image is considered. Identify and describe the characteristics of existing methods for recognizing contours. A certain sequence of methods is proposed. Particular attention is paid to methods that ensure work with complex input data having a close to homogeneous structure. A mathematical feature of the work of each of the methods is described. Examples of output data are given when applying various image processing methods. Based on the practical use of each of the presented computer vision technologies, appropriate conclusions and recommendations are made. The quality of contour detection in the image in the illustrations is compared.
Keywords: recognizing contours, computer vision, complex method, Freeman Chain Code, Canny edge detector, Kuwahara.
569
607

Управление большими системами Выпуск 88
УДК 004.942 ББК 34.1
КОРРЕКТИРОВКА ПЛАНА ЗАГРУЖЕННОСТИ АГРЕГАТОВ ПРОИЗВОДСТВЕННОГО ЦЕХА В УСЛОВИЯХ ИЗМЕНЕНИЯ ПРОИЗВОДСТВЕННЫХ МОЩНОСТЕЙ НА ОСНОВЕ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
Широков А.С.1
(Липецкий государственный технический университет, Липецк)
В работе представлены общие подходы к использованию имитационного моделирования в среде GPSS для нахождения оптимального распределения движения заготовок по альтернативным маршрутам на производстве в случае появления нового оборудования или изменения производительности существующего. Представлен интерфейс программы, позволяющей из схемы движения заготовок и настроенных параметров обработки на каждом из агрегатов получить имитационную модель. Представлены подходы к формированию целевой функции для получения оптимального распределения движения заготовок по альтернативным маршрутам.
Ключевые слова: имитационное моделирование, прокатное производство, оптимизация.
Введение
Задача моделирования технологического процесса появилась на производстве ПАО НЛМК, когда было принято решение расширить Производство холоднокатаного проката за счет установки дополнительного агрегата – реверсивного прокатного стана. На момент решения внедрения данного агрегата на Производство необходимо было проверить, что введение данного агрега-
1 Широков Андрей Сергеевич, аспирант, (shirokov.as@mail.ru).
608 |
705697 |
Информационные технологии в управлении техническими
Управление большими системами. Выпуск XX
системами и технологическими процессами
та в производственный процесс не повлечет за собой перегрузку действующего оборудования (производственных агрегатов и транспортных средств), что могло бы повлечь за собой остановку Производства в целом [5].
Для проверки работоспособности Производства после введения в эксплуатацию дополнительного оборудования были построены имитационные модели для случаев до введения дополнительного оборудования и после его внедрения. Имитационные модели показали высокую но допустимую загруженность агрегатов Производства после предполагаемого ввода в эксплуатацию реверсивного стана холоднокатаного проката [1].
1. Постановка задачи
Дополнительно к задаче проверки работоспособности Производства встала задача возможного перераспределения нагрузки между агрегатами сходного назначения. Например, для холоднокатаного проката могут быть использованы пятиклетевой прокатный стан или установленный реверсивный прокатный стан, для отжига и последующей дрессировки стали могут быть использованы колпаковая печь + дрессировочный агрегат или один агрегат непрерывного отжига, а для оцинкования может быть использован один из имеющихся агрегатов непрерывного горячего цинкования. Для каждого из вариантов может быть по-разному задана нагрузка на имеющийся транспорт. В итоге, решить, сколько рулонов пускать на каждый агрегат, можно было бы только с учетом производительности агрегатов и транспорта. Учесть элемент случайности, который имеется на любом производстве, при таком подходе практически невозможно.
2. Решение
Для определения оптимальной загруженности агрегатов с исследованием элементов случайности было принято решение написать программу, которая с использованием графического интерфейса позволяла бы задать общий план возможных маршру-
2 |
609 |
706698 |

Управление большими системами Выпуск 88
тов между агрегатами, настроить временные параметры обработки каждом агрегатом заготовки, а затем построить по этим данным имитационную модель производства, которая впоследствии могла бы быть использована для поиска некоторого оптимального плана загрузки агрегатов [4]. Использование графического представления движения заготовок упрощает задачу получения имитационной модели, так как визуальная схема процесса настраивается проще, чем программный код на языке GPSS. В качестве достоинства такого подхода может быть выделена легкая модифицируемость уже настроенной модели: на схеме можно значительно быстрее найти изменяемый участок и его перенастроить. Пример схемы одного из маршрутов движения рулонов на Производстве холоднокатаного проката для построения модели приведен на рис. 1.
Рис. 1. Схема движения рулонов на Производстве холоднокатаного проката, соответствующая технологической обработке: травление – холоднокатаный прокат – отжиг – дрессировка
На схеме представлена часть агрегатов, наиболее затрагивае-
610 |
707699 |