

книги / Управление большими системами. УБС-2017
.pdfИнформационные технологии в управлении техническими системами и технологическими процессами
2. Описание нейросетевого настройщика
Проведем краткое описание нейросетевого настройщика параметров ПИ-регулятора. Он представляет собой надстройку над классическим контуром управления. Использование данной схемы позволяет, не внося существенных изменений в систему управления, организовать адаптивное управление процессом.
Нейросетевой настройщик состоит из двух подсистем – нейронной сети и базы правил.
Задачей нейронной сети является численное изменение параметров регулятора В нейронной сети реализовано три набора весовых коэффициентов (рис. 1), что позволяет иметь оптимальные коэффициенты для каждого из процессов: нагрева, остывания и компенсации возмущающих воздействий. Необходимость в трех наборах коэффициентов объясняется различным характером нелинейности объекта управления при нагреве и остывании [4, 18].
Рис. 1. Функциональная схема нейросетевого настройщика
403
441
Управление большими системами. Выпуск XX
Нейронная сеть, используемая в структуре нейросетевого настройщика, представляет собой трехслойную сеть прямого распространения сигнала, структура которой и её выбор подробно описан в [2]. Обучение сети ведется методом обратного распространения ошибки [19].
3. Описание проблемы
Адаптация, проводимая нейросетевым настройщиком, направлена на улучшение последующих переходных процессов относительно оцениваемого текущего процесса, качество которого не будет оптимальным. Более того, результатом работы части правил является ухудшение данного переходного процесса для улучшения последующих. Для примера, на рис. 2 приведена подобная ситуация: завышенный коэффициент KP приводит к перерегулированию. Нейросетевой настройщик реагирует на данную ситуацию уменьшением KP, что оптимизирует следующий переходный процесс, однако ухудшает текущий, так как уменьшение KP увеличит время возраста на уставку. Подобные ситуации имеют место также при процессах нагрева.
Рис. 2. Настройка регулятора на остывание, ухудшающая текущий переходный процесс (Ti = 1/KI)
404
442
Информационные технологии в управлении техническими системами и технологическими процессами
Для борьбы с данной ситуацией предлагается воспользоваться алгоритмом, реализованным для отработки возмущающих воздействий [3]. При идентификации системой действия возмущающего воздействия управление ведется нейронной сетью № 3.
Для того чтобы за минимальное время завершить настраиваемый переходный процесс, предлагается ввести следующие правила в базу правил:
1)Если ошибка больше 5 % разницы значений текущей
ипредыдущей уставок и скорость изменения температуры меньше уровня помех в установившемся режиме, и не срабатывают правила для переходных процессов, то произвести переключение управляющей нейронной сети на сеть № 3 и произво-
дить настройку КI с помощью выставления скорости обучения нейрона ответственного за КI. Увеличение КI позволит ускорить возврат системы в 5 % зону уставки.
2)Если произойдет срабатывание любого из правил для переходных процессов, управление переключится с сети № 3 на сеть № 1 или № 2 (в зависимости от текущего процесса: нагрев или остывание).
4. Экспериментальная проверка предложенной модификации настройщика
Для проверки эффективности данного обновления базы правил было проведено сравнительное моделирование.
Оно проводилось на модели лабораторной муфельной печи типа, полученной методом идентификации:
(1) |
W (S) = |
К |
|
|
1 |
|
e−τ s , |
|
Т1S +1 |
Т2 S +1 |
|||||||
|
ob |
|
|
|||||
|
|
|
|
|
|
|
||
где T1 = 1636 с, T2 = 69,4 с, К = 20,72, τ = 64 с.
Система управления выполняет следующий график уставок (каскад): 505–550–630 °С. Переходный процесс считался завершенным при нахождении ошибки по температуре в 5 % диапазоне разницы текущей и предыдущей уставок в течение 300 с. По завершении переходного процесса происходила смена уставки соответственно графику. Каскад уставок отрабатывался
405
443

Управление большими системами. Выпуск XX
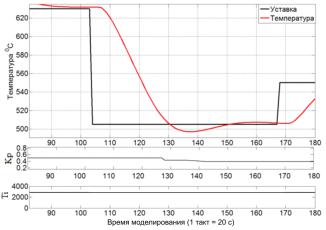
3 раза, после чего менялись параметры модели объекта управления (К = K – 10, T1 = Т1 + 1000 с), что моделирует загрузку стальной заготовки в печь. После четырехкратной отработки каскада уставок параметры модели возвращались к первоначальным, и график задания выполнялся еще 4 раза. В результате получены следующие графики, приведенные на рис. 3 и 4.
Рис. 3. Модернизированный нейросетевойнастройщик
Рис. 4. Исходнаяверсиянейросетевогонастройщика
406
444
Информационные технологии в управлении техническими системами и технологическими процессами
Требованиями к качеству переходного процесса выступают минимально возможное перерегулирование (в пределе 5 % от модуля разницы уставок) и минимально возможное время переходного процесса. С первого переходного процесса первого каскада каждую секунду интегрируется управляющее воздействие с регулятора. По завершении каскада уставок интегрирование прекращается.
Как видно из графиков, нейросетевой настройщик с обновлениями более эффективно отрабатывает каскад уставок, чем нейросетевой настройщик предыдущей версии. В таблице приведены сравнительные характеристики функционирования систем. Ввиду ограниченности объема статьи не приводятся графики аналогичного эксперимента, выполненного для ПИ-регулятора, но его результатытакжевнесенывтаблицу.
Сравнительныехарактеристикиработыдвухверсийнастройщика
|
|
Нейросетевой |
Модернизиро- |
|
Факторсравнения |
ПИ |
настройщик |
ванный |
|
|
|
|
настройщик |
|
Времяэксперимента, час |
14,83 |
12,77 |
10,67 |
|
Экономиявремени,% |
0 |
13,9 |
28,07 |
|
Суммарноеуправляющее |
8297 |
6939 |
5723 |
|
воздействие, ед. |
|
|
|
|
Экономияпоуправляюще- |
0 |
16,37 |
31,02 |
|
му воздействию, % |
||||
|
|
|
||
5. Заключение |
|
|
|
Результатом проведенного сравнительного моделирования является подтверждение эффективности новой версии нейросетевого настройщика. Удалось минимизировать один из недостатков подобных систем настройки, представляющий собой ухудшение настраиваемого переходного процесса для улучшения качества следующего за ним процесса. За счет использования новой версии настройщика удалось значительной сократить время эксперимента (на 28,07 % относительно ПИ-регу- лятора и на 13,9 % относительно старой версии настройщика)
407
445
Управление большими системами. Выпуск XX
и суммарное управляющее воздействие (на 31,02 и 16,37 % соответственно).
Литература
1.АНДРИЕВСКАЯ Н.В., РЕЗНИКОВ А.С., ЧЕРАНЕВ А.А.
Особенности применения нейронечетких моделей для задач синтеза систем автоматического управления // Фундамен-
тальные исследования. – 2014. – № 11–7. – С. 1445–1449.
2.ЕРЕМЕНКО Ю.И., ГЛУЩЕНКО А.И. О разработке мето-
да выбора структуры нейронной сети для решения задачи адаптации параметров линейных регуляторов // Управле-
ниебольшимисистемами: сб. тр. – 2016. – Т. 62. – С. 75–123.
3.ЕРЕМЕНКО Ю.И., ГЛУЩЕНКО А.И., ФОМИН А.В. При-
менение нейросетевого настройщика параметров ПИ-регу- лятора нагревательной печи для отработки возмущающих воздействий различных типов // Системы управления и ин-
формационные технологии. – 2016. – № 2(64). – С. 86–91.
4.ЕРЕМЕНКО Ю.И., ПОЛЕЩЕНКО Д.А., ГЛУЩЕНКО А.И.
О применении нейросетевого оптимизатора параметров ПИ-регулятора для управления нагревательными печами в различных режимах работы // Управление большими сис-
темами. – 2015. – Вып. 56. – С. 143–175 с.
5.КУДИНОВ Ю.И., КЕЛИНА А.Ю. Упрощенный метод определения параметров нечетких ПИД-регуляторов // Мехатро-
ника, автоматизация, управление. – 2013. – № 1. – С. 12–22.
6.МАЛЬЦЕВ С.А., ЛЕВАШКИН Д.Г. Управление мехатрон-
ными системами на основе алгоритмов экспертных логиче-
ских систем // Теплофизические и технологические аспекты повышения эффективности машиностроительного производства: тр. IV Междунар. науч.-техн. конф. (Резниковские чтения) / Тольят. гос. ун-т. – Тольятти, 2015. – С. 334–337.
7.НИКИФОРОВ В.О., ФРАДКОВ А.Л. Схемы адаптивного уп-
равления с расширенной ошибкой. Обзор // Автоматика и те-
лемеханика. – 1994. – № 9. – С. 3–22.
8.ОМОРОВ Т.Т., ДЖОЛДОШЕВ Б. О Краткий обзор мето-
дов анализа и синтеза нелинейных САУ // Изв. Кыргыз. гос.
техн. ун-та им. И. Раззакова. – 2012. – № 26. – С. 172–183.
408
446
Информационные технологии в управлении техническими системами и технологическими процессами
9. РОМАНОВА И.К. Применение аналитических методов к исследованию парето-оптимальных систем управления //
Наука и образование. – 2014. – № 4. – С. 238–266.
10.САЛИХОВ З.Г., АРУНЯНЦ Г.Г., РУТКОВСКИЙ А.Л. Сис-
темы оптимального управления сложными технологиче-
скими объектами. – М.: Теплоэнергетик, 2004. – 496 с.
11.ШТЕЙНБЕРГ Ш.Е. Идентификация в системах управления. – М.: Энергоатомиздат, 1987. – 80 с.
12.ШУЛАЕВА Е.А., ШУЛАЕВ Н.С. Система управления температурными режимами электродинамического реактора //
Нефтегазовое дело. – 2013. – № 11–4. – С. 133–136.
13.ALEXANDROV A.G., PALENOV M.V. Self-tuning PID-I controller. Proceedings of the 18th IFAC World Congress. – IFAC, Milano, Italy, 2011. – P. 3635–3640.
14.BEGUM K.G., RAO A.S., RADHAKRISHNAN T.K. Maximum
sensitivity based analytical tuning rules for PID controllers for unstable dead time processes // Chemical Engineering Research and Design. – 2016. – Vol. 109. – P. 593–606.
15.CHEN J., HUANG T. Applying neural networks to on-line updated PID controllers for nonlinear process control // J. of Process Control. – 2004. – No. 14. – P. 211–230.
16.EFFATI S., PAKDAMAN M. Optimal control problem via neural networks // Neural Computing and Applications. – 2013. – Vol. 23. – No. 7–8. – С. 2093–2100.
17.HÄGGLUND T., ÅSTRÖM K.J., Supervision of adaptive control algorithms // Automatica. 2000. – Vol. 36. – No. 8. – P. 1171–1180.
18.MIMURA K., SHIOTSUKI T. Experimental study of PID autotuning for unsymmetrical processes // Proceedings of ICCASSICE 2009. – IEEE, 2009. – P. 2967–2971.
19.OMATU S., KHALID M., YUSOF R. Neuro-Control and its Applications. – London: Springer, 1995. – 255 p.
20.VILANOVA R., VISIOLI A. PID Control in the Third Millennium. Lessons Learned and New Approaches. – London: Springer, 2012. – 595 p.
409
447
Управление большими системами. Выпуск XX
PI-CONTROLLER NEURAL TUNER PERFORMANCE IMPROVEMENT BY REFINEMENT OF ITS RULE BASE FOR TRANSIENTS
Anton Glushchenko, Stary Oskol Technological Institute n.a. A.A. Ugarov (branch) NUST "MISIS", Stary Oskol, Cand.Sc ((4725)45-12-17, strondutt@mail.ru).
Fomin Andrey, Stary Oskol Technological Institute n.a. A.A. Ugarov (branch) NUST "MISIS", Stary Oskol, postgraduate (verner444@ yandex.ru).
Abstract: A short description of a PI-controller neural tuner and new rules for its rule base are shown in this research. These new rules allow to overcome one of the main disadvantages of the adaptive control systems under consideration: a current transient quality deterioration in order to make better the following one. Comparative modelling experiments are made using the old and new versions of the tuner rule base. The new one allows to decrease the experiment time by 28 % and 14 % comparing to a conventional PI-controller and the tuner with the rule base of the old version respectively. The total control action signal is also decreased by 31 % and 16.4 % respectively.
Keywords: neural tuner, adaptive control, heating furnaces, transients, neural networks, PI-controller.
410
448

Информационные технологии в управлении техническими системами и технологическими процессами
УДК 021.8 + 025.1 ББК 78.34
ПРИМЕНЕНИЕ ОБЪЕКТНО-ОРИЕНТИРОВАННОГО ПОДХОДА ДЛЯ РЕАЛИЗАЦИИ АЛГОРИТМОВ ТЕОРИИ ГРУБЫХ МНОЖЕСТВ
НА ИНТЕРВАЛЬНЫХ ДАННЫХ
Сыроквасов А.В.1
(Липецкий государственный технический университет, Липецк)
В данной статье рассматриваются основные проблемы программной реализации алгоритмов теории грубых множеств для решения задач классификации на интервальных данных.
Ключевые слова: грубые множества, интервальные значения, задачиклассификации, объектно-ориентированноепрограммирование.
При решении задач классификации, применяемых на практике, зачастую может потребоваться обработка больших объемов входных данных. Наборы исходных значений, которые необходимо классифицировать с заданной условием выборкой могут описывать реальные объекты или их свойства. Это повышает сложность математических моделей представления и требует дополнительных временных и вычислительных ресурсов.
Ускорить процесс обработки позволяют алгоритмы теории грубых множеств. Данный математический подход был разработан в 1982 г. польским ученым Zdzislaw Pawlak. Особенностью данного метода является описание неразличимости объектов, характеризуемых с точки зрения сходной информации, имеющейся для их описания [4]. Однако, в свою очередь, автоматизация алгоритмов теории грубых множеств требует построения организо-
1 Александр Владимирович Сыроквасов, студент (alex.sirokvasoff2011@ yandex.ru).
411
449
Управление большими системами. Выпуск XX
ванного вычислительного комплекса, так как расчеты производятся путем последовательного решения нескольких задач.
С точки зрения программной реализации рациональным решением является логическое разделение кода на отдельные модули, что значительно упростит задачу локализации расчетов, а также снизит объем написания текста программы. Удобным решением является проектирование с объектно-ориентирован- ным подходом.
В ходе решения задачи будет получен определенный набор матриц. Он включает в себя матрицу начальной выборки, α-матрицу, матрицу толерантности и матрицу различимости. Каждая строка матрицы выборки характеризует определенный класс, атрибуты которого заданы в виде интервальных значений [1–2]. Набор атрибутов отображается в столбцах. Формат матрицы представлен в табл. 1. Данный пример рассматривает задачу прогнозирования качества литых слябов. Основной критерий классификации данных – наличие дефекта горячего проката, а атрибутами служат параметры разливки стали.
Таблица 1. Статистика
Набор |
|
Набор атрибутов |
|
|
классов |
[a1min; a1max] |
[a..min; a..max] |
|
[anmin; anmax] |
Класс u1 |
[0;4,9] |
[0;14,89] |
|
[201,3;260,6] |
Класс u2 |
[0;4,8] |
[0;1,49] |
|
[201,6;258,7] |
Класс u3 |
[0;4,8] |
[0;11,03] |
|
[201,26;259,41] |
Класс u4 |
[0;4,21] |
[0;5,27] |
|
[201,6;258,821] |
Основной проблемой определения классификации по входной выборке является пересечение значений интервалов, которые относятся к одному атрибуту, но разным классам. Для анализа такого рода неопределенностей вычисляется α-матрица, размер которой равен nxn, где n – количество классов. Таким образом, элемент на пересечении столбца i и строки j покажет вероятность ошибки отнесения тестового элемента класса j к классу i. Точность вычислений задает указанный пользователем параметр α.
412
450