

книги / Механика сплошных сред (теоретические основы обработки давлением композитных материалов с задачами и решениями, примерами и упражнениями)
..pdf1.2. КИНЕМАТИКА
|
|
1 |
|
|
|
0,0625 |
0 |
0 |
|
|
S |
= |
ε[[δ |
ik |
]] = |
0 |
0,0625 |
0 |
. |
||
|
||||||||||
ε |
3 |
|
|
|
|
|
|
|||
|
|
|
|
0 |
0 |
0,0625 |
|
|||
|
|
|
|
|
|
|
||||
Девиатор деформаций (1.2.84)
Dε =[[eik ]] = Tε −Sε =  εik − 13 εδik
εik − 13 εδik 
или
0,0575 |
−0,16 |
0 |
Dε = −0,16 |
−0,1825 |
0 . |
0 |
0 |
0,125 |
Самостоятельно выполнить проверку правильности вычисления компонент девиатора деформации.
3. Для нахождения главных компонент тензора деформаций решим характе# ристическое уравнение (1.58) его матрицы
|εik – λδik| = 0
или
–λ3 + εIλ2 – εIIλ + εIII = 0,
где первый εI, второй εII и третий εIII инварианты тензора деформаций опреде# ляются соотношениями
εI = ε11 + ε22 + ε33; εII = |
|
ε11 |
ε12 |
|
+ |
|
ε22 |
ε23 |
|
ε33 |
ε31 |
|
; εIII = | εik|. |
|
|
|
+ |
|
|||||||||
|
|
ε21 |
ε22 |
|
|
|
ε32 |
ε33 |
|
ε13 |
ε11 |
|
|
Раскрывая определитель в характеристическом уравнении, найдем:
(0,12 – λ)(– 0,12 – λ)(0,1875 – λ) – 0,0256 (0,1875 – λ) = 0.
Отсюда видно, что первый корень характеристического уравнения λ1 = 0,1875, а остальные его корни определим из квадратного уравнения λ2 = 0,04. Отсюда λ2 = + 0,2; λ3 = – 0,2. Располагая компоненты тензора деформаций с соблюде# нием условия (1.2.79)
61
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
ε1 ≥ ε2 ≥ ε3,
найдем диагонализированный вид матрицы тензора деформаций
0,2 0 0
Tε = 0 0,1875 0 . 0 0 −0,2
Самостоятельно выполнить проверку правильности диагонализации тензора деформации.
4. Для вычисления интенсивности сдвиговых деформаций можно воспользоваться формулами (1.2.87) или их модификацией:
Г = 2 |
1[(ε − ε |
22 |
)2 |
+ (ε |
22 |
− ε |
33 |
)2 |
+ (ε |
33 |
− ε |
)2 + 6(ε2 |
+ ε2 |
+ ε2 |
)] . |
|
|
6 |
11 |
|
|
|
|
|
11 |
12 |
23 |
31 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисление по одной из формул для определения Г, например последней, позволяет получить
Г = 2 |
1 |
(0,242 |
+ 0,30752 + 0,06752 ) + 0,162 |
= 0,4537. |
|
6 |
|||||
|
|
|
|
1.2.5. Условие совместности деформаций
Предполагается, что исходное недеформированное в момент времени t0 и деформированное в произвольный момент времени t состояния всегда рассматриваются в евклидовом пространстве. Из геометрии Г. Римана известно, что математически это предположение относительно компонент градиентов (1.2.13), (1.2.19) и компонент тензоров (1.2.28), (1.2.40), (1.2.46), (1.2.57) записывается в виде равенства нулю тензора Г. Римана–Э.Б. Кристоффеля (П1.99) либо в лагранжевых, либо в эйлеровых координатах. Решение задач с использованием таких соотношений выходит за рамки излагаемого курса. Для малых деформаций (1.2.70) равенство нулю компонент тензора (П1.99) эквивалентно условию
2 × Tε = 0. |
(1.2.88) |
На основании (П1.88) подстановка (1.2.70) в (1.2.88) приводит к тождеству. Это означает, что при решении задач МСС в перемещениях нет необходимости проверять выполнение условия (1.2.88), когда тензор деформаций определяется по формуле О. Коши (1.2.70). При решении же этих задач в малых деформа-
62

1.2. КИНЕМАТИКА
циях на тензор Tε должны быть наложены ограничения в виде соотношения (1.2.88), которое называется условием Б. Сен Венана или в данном случае усло вием совместности деформаций. С математической точки зрения выполнение соотношения между компонентами тензора деформаций Tε в (1.2.88) является необходимым и достаточным условием интегрируемости множества уравнений О. Коши (1.2.70) относительно компонент вектора перемещения (П1.6), кото-
рые вычисляются по обобщенной формуле Е. Чезаро (П1.108) с заменой в ней a
a0 на U0 , Tc0 на Tω0 и Tb на Tε:
U =U0 + Tω0 (x − x0 ) − ∫x |
(x − y)×( ×Tε dy) + ∫x |
Tε dy, (1.2.89) |
x0 |
x0 |
|
– значения вектора перемещенияU и тензора жесткого поворота Tω соответственно в начале пути интегрирования при x = x0 .
Определение вектора перемещения U по тензору деформаций Tε с помощью формулы (1.2.89) удобно лишь тогда, когда этот тензор удовлетворяет уравнению совместности деформаций Б. Сен-Венана (1.2.88). В противном случае интегрирование может быть трудно выполнимым. Это является основной причиной редкого применения решения задач МСС в деформациях.
1.2.6. Поле скоростей
По определению скорость перемещения материальных частиц вычисляется по формуле (1.2.15). Учитывая (1.2.4) и (1.2.10), вектор скоростиV можно также рассчитать по формуле
|
|
|
|
V = dU . |
(1.2.90) |
||
|
|
|
|
dt |
|
|
|
|
В лагранжевых координатах из (П1.91) и (1.2.10) имеемV = |
dE(Li , t) |
= |
||||
|
dt |
||||||
|
∂E(Li , t) |
|
|
|
|
||
= |
. В эйлеровых координатах вследствие независимости пространствен- |
||||||
∂t |
|||||||
|
|
∂Ei |
|
|
|
||
|
|
|
|
||||
ных координат от времени |
∂t |
≡ 0 такая процедура приводит к тождеству |
|||||
|
|
|
|
|
|
||
V ≡ Tδ V. На практике наибольший интерес представляет раскрытие полной про-
n
изводной (1.2.10) с помощью (1.2.16), где вместо Ta нужно подставить (1.2.9):
63

1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
dL |
= |
∂L |
+V ( L) = 0. |
(1.2.91) |
dt |
|
∂t |
|
|
Отсюда, решая замкнутую относительно компонент Vi вектора скоростиV
систему, приходим к формуле И. И. Гольденблата
V = − |
D |
, |
(1.2.92) |
|
|||
|
JE |
|
|
где компоненты Di вспомогательного вектора D получаются из якобиана (1.2.20) путем замены дифференцирования лагранжевых координат по координате Ei дифференцированием по времени t. Если такую замену дифференцирования выполнить в декартовых координатах, то компоненты вспомогательного вектора будут иметь вид
D = |
∂L |
|
∂Lj |
∂L |
; D = |
∂L |
∂Lj ∂L |
; |
||||||
i |
|
k |
i |
|
|
k |
||||||||
∂E |
∂E |
|
||||||||||||
1 |
ijk |
∂t |
|
∂E |
|
2 |
ijk |
∂t ∂E |
|
|||||
|
|
|
2 |
3 |
|
|
|
|
1 |
|
3 |
|
||
|
|
|
D = |
∂L |
|
∂Lj |
∂L |
|
|
|
|
|
||
|
|
|
i |
|
|
k . |
|
|
(1.2.93) |
|||||
|
|
|
∂E |
|
∂E |
|
|
|||||||
|
|
|
3 |
ijk |
|
∂t |
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
Для произвольных координат вспомогательный вектор
D = |
∂L1 |
(L2 × L3 ) + |
∂L2 |
(L3 × L1) + |
∂L3 |
(L1 × L2 ). (1.2.94) |
|
∂t |
|
∂t |
|
∂t |
|
Подстановкой (1.2.94) в (1.2.92) получим окончательный вид формулы, предложенной в кинематике Б. В. Кучеряевым, для определения вектора скорости по заданному закону движения (1.2.9) в эйлеровых координатах:
V = − |
1 |
∂L1 |
( L |
× L ) + ∂L2 |
( L |
× L ) + |
∂L3 ( L |
× L ) |
. |
(1.2.95) |
||||
|
||||||||||||||
|
|
|
2 |
3 |
∂t |
|
3 |
1 |
∂t |
1 |
2 |
|
|
|
|
JE ∂t |
|
|
|
|
|
|
|
|
|
|
|||
Упражнение 1.2.3. Доказать, что |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
D = |
∂JE |
|
|
|
|
|
(1.2.96) |
||
|
|
|
|
|
∂t |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
64
|
|
|
|
|
|
1.2. КИНЕМАТИКА |
В общем случае |
|
|
|
|
|
|
|
1 |
∂J |
E |
|
|
|
V = |
|
D JE − JE |
|
. |
(1.2.97) |
|
2 |
∂t |
|||||
|
JE |
|
|
|||
В частном случае при выполнении (1.2.55) устанавливаем, что в окрестности материальной частицы, движущейся без изменения объема, поле скоростей должно быть соленоидальным:
V = 0. |
(1.2.98) |
Это соотношение называется условием несжимаемости сплошной среды. Выполнение условия постоянства объема (1.2.55) приводит (1.2.92) к виду
V = −D. |
(1.2.99) |
В частности, в декартовых прямоугольных координатах такой вектор имеет компоненты, совпадающие с точностью до знака с компонентами вектора D в формуле (1.2.93).
Каждая функция Li(Ek, t) в пространстве Ek при фиксированном времени t представляется семейством изоповерхностей Li = const. Если две такие функ-
ции, например L1 и L3, не зависят от времени ∂∂Lt1 = ∂∂Lt3 = 0, то геометрически
это означает, что вид изоповерхностей L1 = const и L3 = const в пространстве Ek не меняется по времени.
Упражнение 1.2.4. Показать, что при ∂∂Lt1 = ∂∂Lt3 = 0 формула (1.2.92) преобразуется к виду
|
V = − |
1 |
|
∂L2 ( L |
× L ) |
|
(1.2.100) |
|||
|
|
|
|
|||||||
|
|
|
JE |
|
∂t |
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
Для стационарного поля скоростей (1.2.24) в (1.2.100) величина |
∂L2 |
= const. |
||||||||
|
∂L2 |
|
|
|
|
|
|
|
∂t |
|
Обозначим эту величину |
= – V . Тогда из (1.2.100) получим |
|
|
|||||||
|
∂t |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
V = |
V0 |
( L × L ). |
|
(1.2.101) |
||||
|
|
|
|
|||||||
|
|
|
|
JE |
3 |
1 |
|
|
||
|
|
|
|
|
|
|
|
|||
65

1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
Ясно, что при выполнении условия (1.2.55), учитывая тождество (П1.85), из (1.2.101) получаем условие несжимаемости (1.2.98). Такое поле скоростей полностью определяется константой V0 и двумя функциями L1(Ei) и L3(Ei):
V =V0 ( L3 × L1 ) . |
(1.2.102) |
В гидродинамике обычно одну из лагранжевых координат, например L1, связывают с функцией тока Ψ, совпадающей с L1 с точностью до постоянного сомножителя и несущественной аддитивной константы:
Ψ = – V0 L1 + C. |
(1.2.103) |
Тогда из (1.2.102) с учетом (1.2.103) получим |
|
V = Ψ× L3 . |
(1.2.104) |
В частности, при двухмерном течении, когда L3 = E3, из (1.2.104) имеем
V = Ψ × E3 . |
(1.2.105) |
Из теории векторных полей известно, что векторной линией называется пространственная линия, в каждой точке которой касательная к ней совпадает с направлением вектора в этой точке. Векторная линия поля скоростей называется линией тока. Следовательно, элемент длины dE линии тока колинеарен вектору скорости V : V ×dE = 0 . Отсюда, в соответствии с (П1.2), имеем
dE =Vdλ , |
(1.2.106) |
где dλ – скалярный параметр. В скалярной форме (1.2.106) имеет вид
dE1 |
= |
dE2 |
= |
dE3 |
= dλ . |
(1.2.107) |
|
V |
V |
V |
|||||
|
|
|
|
||||
1 |
2 |
3 |
|
|
|||
Эти соотношения называются дифференциальным уравнением линии тока. Подобно соотношению (1.2.15) уравнения (1.2.106), (1.2.107) представим в виде
dE |
=V . |
(1.2.108) |
dλ |
|
|
Отличие (1.2.15) и (1.2.108) состоит в том, что в (1.2.15) время t входит как в левую, так и в правую части равенства, а в (1.2.108) – только в правую часть.
66
1.2. КИНЕМАТИКА
Интегрирование (1.2.15) по времени позволяет рассчитать траекторию движения материальной частицы – линию, по которой перемещается эта частица. Таким образом, в общем случае линия тока и траектория материальной частицы не совпадают. Для стационарных полей скоростей (1.2.24) время как переменная величина не входит в первую часть соотношения (1.2.15). Поэтому для стационарных течений скалярные параметры dt в (1.2.15) и dΟ в (1.2.106) – (1.2.108) практически совпадают, что для таких течений приводит к совпадению понятий «траектория материальной частицы» и «линия тока».
Покажем, что в стационарных течениях на линии тока величины < и L3, входящие в (1.2.104), постоянны. Для этого подставим (1.2.104) в дифференциальное уравнение линии тока (1.2.107).
Упражнение 1.2.5. Показать, что вдоль линии тока величины < и L3 из (1.2.104) удовлетворяют соотношению
<dL3 – L3 d< = 0 |
(1.2.109) |
Обращение (1.2.109) в тождество может быть связано либо с равенством нулю дифференциалов < и L3
d< = 0; dL3 = 0, |
(1.2.110) |
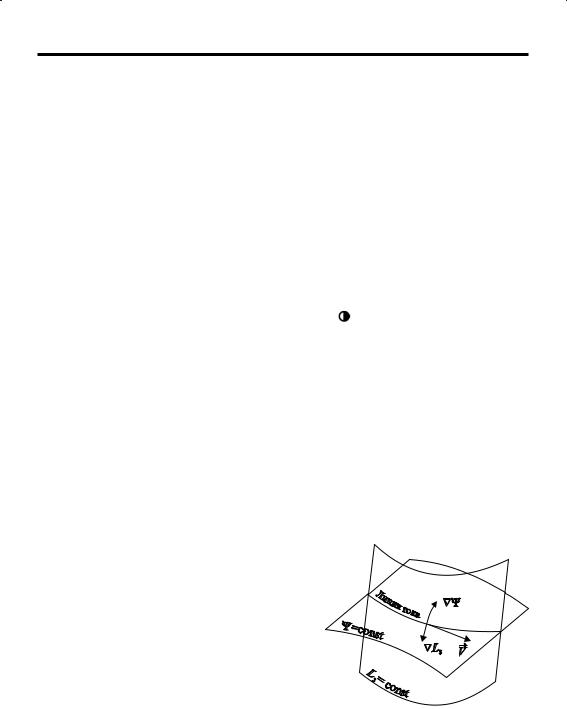
либо с пропорциональностью < и L3. Последнее невозможно, так как в соответствии с (1.2.103) функция < пропорциональна лагранжевой координате L1, и вследствие линейной независимости (П2.1) всех координат Li функция < не может быть пропорциональна двум другим лагранжевым координатам, в том числе и L3. Следовательно, (1.2.110) является единственным условием обращения (1.2.109) в тождество. Так как условия (1.2.110) выполняются вдоль линии тока, то это значит, что на этой линии имеем < = const и L3 = const, а сама линия тока находится на пересечении изоповерх-
ностей <(Ei) = const и L3(Ei) = const (рис. 17).
Изоповерхность <= const называется поверх
ностью тока. Таким образом, функцией тока
называют всякую функцию < типа (1.2.103), принимающую на линии и поверхности тока постоянное значение.
Рассмотрим несколько примеров построения поля скоростей по заданным законам движения (1.2.9).
Сначала рассмотрим сжатие (осадку) между двумя параллельными абсолютно жесткими плитами прямоугольного парал-
Рис. 17. Линия тока как пересечение по9 верхности тока < = const с лагранжевой
поверхностью L3 = const
67
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
лелепипеда с исходными размерами h0 ; b0 ;  0 и текущими размерами h; b;
0 и текущими размерами h; b;  , в котором не происходит изменения объема ( h0b0
, в котором не происходит изменения объема ( h0b0 0 = hb
0 = hb ) и отношение начальной к текущей ширине равно отношению начальной к теку-
) и отношение начальной к текущей ширине равно отношению начальной к теку-
b |
= |
0 |
|
|
щей длине |
0 |
. |
||
b |
|
|||
|
|
|
|
|
Пусть h = h(t) – изменение высоты параллелепипеда во времени t, удовлетворяющее начальному условию h(t0) = h0. В общем случае при осадке в направлении оси E1 с увеличением времени t происходит уменьшение текущей высоты h и соответствующее увеличение размеров b и  . Закон движения (1.2.9) для рассматриваемой задачи может быть представлен в виде
. Закон движения (1.2.9) для рассматриваемой задачи может быть представлен в виде
L = |
h0 E1 |
; L = |
0 E2 |
; L = |
b0 E3 |
. |
(1.2.111) |
|
|
|
|||||
1 |
h |
2 |
3 |
b |
|
||
|
|
|
|
|
|||
Условия задачи позволяют записать лагранжевы координаты через высотные параметры
L = |
h0 E1 |
; L = E |
h |
; |
L = E |
h |
. |
(1.2.112) |
||
1 |
h |
2 |
2 |
h |
|
3 |
3 |
h |
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
Тогда для начальных условий имеем h = h0 и Li = Ei, а из граничных условий на гранях параллелепипеда (L1 = h0; L2 =  0 ; L3 = b0 и E1 = h; E2 =
0 ; L3 = b0 и E1 = h; E2 =  ; E3 = b), учиты-
; E3 = b), учиты-
вая заданное условие постоянства объема, получим b = b |
h0 |
; = |
0 |
h0 |
. |
||||||
|
|
||||||||||
|
|
|
|
0 |
h |
h |
|||||
|
|
|
|
|
|
|
|
||||
Определим пространственный градиент деформации (1.2.19) |
|
|
|
||||||||
|
h0 |
0 |
0 |
|
|
|
|
|
|
||
|
h |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
L = 0 |
|
h |
0 |
|
|
|
|
|
|
||
|
h0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
h |
|
|
|
|
|
|
||
|
h0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
68
1.2. КИНЕМАТИКА
|
|
|
|
∂L1 |
|
h0 E1 |
′ |
∂L2 |
|
E2 |
′ |
и частные производные Li по времени t: ∂t |
= − |
|
h ; |
|
= |
|
h ; |
||||
h2 |
∂ |
2 hh0 |
|||||||||
∂t |
= 2 hh |
h |
|
|
|
|
t |
|
|
||
|
|
|
|
|
|
|
|
||||
∂L3 |
|
E3 |
|
′, где h′ – частная производная функции h(t) по времени t. Далее |
|||||||
0 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
устанавливаем, что якобиан (1.2.20), составленный из компонент тензора
L , равен единице и условие задачи о неизменности объема параллелепи-
педа, выражаемое формулой (1.2.55), выполняется независимо от времени t. Поэтому вектор скорости (1.2.95) должен удовлетворять условию несжимаемости (1.2.98), а его компоненты в соответствии с (1.2.99) в эйлеровых координатах Ei определяются формулами (1.2.93):
V1 |
= |
E1 |
′ |
= − |
E2 |
′ |
= − |
E3 |
′ |
(1.2.113) |
|
|
|
||||||||
h |
h ; V2 |
2h |
h ; V3 |
2h |
h . |
|||||
|
|
|
|
|
|
|
|
Упражнение 1.2.6. Используя соотношение (1.2.111) и условия рассмотренной выше задачи об осадке параллелепипеда, построить поле скоростей в лагранжевых координатах Li.
Упражнение 1.2.7. Выполнить расчет компонент тензоров деформации по теориям конечных (1.2.42), (1.2.59) и малых деформаций (1.2.70). Показать, что во всех случаях поля деформаций являются однородными и не зависят от
|
|
|
|
|
δL12 |
= δL12 |
h |
|
||
координат в любой момент времени. Построить графики |
|
0 |
и |
|||||||
h |
||||||||||
|
|
h |
|
|
|
|
|
|||
δE12 |
= δE12 |
|
|
|
|
|
||||
|
0 |
ошибок |
|
|
|
|
|
|||
h |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
δL |
= |
Lik − εik |
100%; δE |
= |
Eik − εik |
100%, |
(1.2.114) |
|
|
||||||
ik |
|
εik |
|
εik |
|
||
|
|
ik |
|
|
|
|
|
получаемых при замене конечных деформаций малыми деформациями  Закон движения (1.2.111) может быть использован для расчета параметров
Закон движения (1.2.111) может быть использован для расчета параметров
осадки при плоской и осесимметричной деформациях.
В первом случае отсутствие движения в одном из направлений, например L2, обеспечивается равенством  =
=  0 и его следствием L2 = E2. Тогда измене-
0 и его следствием L2 = E2. Тогда измене-
ние ширины полностью определяется условием постоянства объема b = b0 hh0 , а закон (1.2.111) принимает вид
69
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
L1 = h0 E1 ; L2 h
= E |
; |
L = |
hE3 |
. |
(1.2.115) |
|
|||||
2 |
|
3 |
h0 |
|
|
|
|
|
|
||
Во втором случае расчеты удобнее вести в цилиндрических координатах, для которых в индексированных переменных при подстановке значений индексов вместо цифр 1, 2, 3, как это делалось ранее, следует использовать буквы z, ϕ, ρ. При осесимметричной деформации Lϕ = Eϕ . Параметры b и b0 в законе движения (1.2.111) обозначим R и R0 соответственно. Тогда, учитывая условие постоянства объема для цилиндрического образца ( h0 R02 = hR2 ), закон (1.2.111) принимает вид
L |
= |
h0E1 |
; |
L |
= E |
; |
L |
= E |
h |
. |
(1.2.116) |
h |
|
||||||||||
z |
|
|
ϕ |
ϕ |
|
ρ |
ρ |
h |
|
||
|
|
|
|
|
|
|
|
|
0 |
|
|
Таким образом, закон движения (1.2.111) при h = h(t) ≤ h0 позволяет с помощью формулы (1.2.95) построить нестационарное поле скоростей, соответствующее процессу осадки образца в условиях объемной и двухмерной (плоской или осесимметричной) деформаций.
Отметим, что формулы (1.2.111) и их частные виды (1.2.112), (1.2.115), (1.2.116) также можно использовать для построения поля скоростей, соответствующего процессу растяжения образца. Для этого необходимо представить закон h = h(t) так, чтобы с увеличением времени t происходило увеличение текущей высоты h и соответствующее уменьшение размеров b и  . В общем случае закон нестационарного изменения высоты образца может быть представлен в виде
. В общем случае закон нестационарного изменения высоты образца может быть представлен в виде
h = h0 ± hf(t), |
(1.2.117) |
где h – абсолютное изменение высоты образца к конечному моменту времени tk; f(t) – положительная безразмерная непрерывная функция времени, удовлетворяющая условиям f(t0) = 0 и f(tk) = 1. При решении задач растяжения в правой части (1.2.117) ставится знак плюс, осадки – минус.
Для стационарных процессов, как отмечалось ранее, поле скоростей определяется по формуле (1.2.101), а при выполнении условия постоянства объема (1.2.55) – по формуле (1.2.102).
Пусть в (1.2.111) координата L2 линейно зависит от времени t:
L2 = – v0t + F(Ei), |
(1.2.118) |
а остальные лагранжевы координаты вследствие соотношений h = h(E2; E3) и b = b(E1; E2) зависят только от эйлеровых координат. Тогда, используя
70