

книги / Механика сплошных сред (теоретические основы обработки давлением композитных материалов с задачами и решениями, примерами и упражнениями)
..pdf1.2. КИНЕМАТИКА
Отсюда видно, что общее изменение длины волокна, так же как это было установлено в предыдущей задаче, связано лишь с изменениями проекций вектора dE на вторую и третью эйлеровы оси координат.
Задача 1.2.3.3. Используя тензоры TC и TE задачи 1.2.3.1, определить главные компоненты тензора конечных деформаций О. Коши и тензора конечных деформаций Л. Эйлера.
Решение. Составим характеристическое уравнение матрицы тензора конечных деформаций О. Коши, полученного в задаче 1.2.3.1: | Cij – λδij| = 0 или
5 |
|
5 |
|
|
|
|
9 |
|
|
|
|
|
|
||||||
(1− λ) |
|
− λ |
|
|
|
|
−λ − |
|
|
|
|
|
(1 |
− λ) = 0 . |
|
|
|||
|
|
|
|
1024 |
|
|
|||||||||||||
32 |
|
32 |
|
|
|
|
|
|
|
||||||||||
Отcюда λ1 = 1 и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ2 − |
|
5 |
|
λ + |
1 |
|
= 0 . |
|
|
|
|
|
|||||
|
|
16 |
64 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решая это уравнение, получим λ |
= |
|
9 |
; λ = |
1 |
|
. Соблюдая условие C ≥ C ≥ C , |
||||||||||||
32 |
|
||||||||||||||||||
|
|
|
2 |
|
|
|
3 |
|
32 |
|
|
|
1 |
2 |
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
составим диагонализированный вид тензора конечных деформаций О. Коши:
1 |
0 |
0 |
|
||
TC = 0 |
9 |
0 . |
|||
32 |
|||||
|
|
1 |
|
||
0 |
0 |
|
|||
32 |
|
||||
|
|
|
|||
Тогда в соответствии с (2.4) тензор конечных деформаций Л. Эйлера в главных координатах
|
|
1−1 |
0 |
0 |
|
0 |
0 |
0 |
|
|||
T = 1 |
0 |
1− |
9 |
0 |
|
= 0 |
23 |
0 . |
||||
|
|
|
||||||||||
E |
2 |
|
|
32 |
|
|
|
|
32 |
|
|
|
|
|
|
|
|
1 |
|
31 |
|||||
|
|
0 |
|
0 |
1− |
|
0 |
0 |
||||
|
|
|
|
|
32 |
|
||||||
|
|
|
|
|
|
32 |
|
|
|
|||
51
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
Эти же результаты можно получить, решая полные кубические характеристические уравнения –λ3 + CIλ2 – CIIλ + CIII = 0 и –λ3 + EIλ2 – EIIλ + EIII = 0, где инварианты тензора конечных деформаций О. Коши
CI = C |
|
= |
42 |
; CII = |
1 |
(CI2 |
−C C |
ji |
) = |
329 |
; CIII = |C |
| = |
9 |
, |
|
ii |
|
|
|
|
|
||||||||||
|
|
32 |
|
2 |
|
ij |
4096 |
ij |
|
1024 |
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
а инварианты тензора конечных деформаций Л. Эйлера
EI = E |
|
= |
27 |
; EII = |
1 |
(EI2 |
− E E |
ji |
) = |
713 |
; EIII = |E |
| = 0. |
ii |
|
|
|
|||||||||
|
|
32 |
2 |
|
ij |
|
4096 |
ij |
|
|||
|
|
|
|
|
|
|
|
|
||||
Самостоятельно проанализировать физический смысл компонент тензоров конечных деформаций О. Коши и Л. Эйлера в главных координатах.
1.2.4. Теория малых деформаций
Деформация окрестности материальной частицы называется малой дефор
мацией, если компоненты |
∂Ui |
тензора искажения в (1.2.6) существенно малы |
|||||
∂x |
|||||||
|
|
|
|
|
|
||
|
k |
|
|
|
|
|
|
по сравнению с единицей: |
|
|
|
|
|
|
|
|
|
|
∂x |
|
<<1. |
(1.2.69) |
|
|
|
|
|
||||
|
|
|
∂Ui |
|
|
||
|
|
|
k |
|
|
|
|
В этом случае для параметров движения среды нет значимого различия между приращениями эйлеровых и лагранжевых координат, проявляющегося в отличии в общем случае между компонентами тензоров конечной деформации (1.2.42) и (1.2.59). При выполнении условия (1.2.69) эти тензоры с точностью до
величин U U второго порядка малости по сравнению с тензором ис-
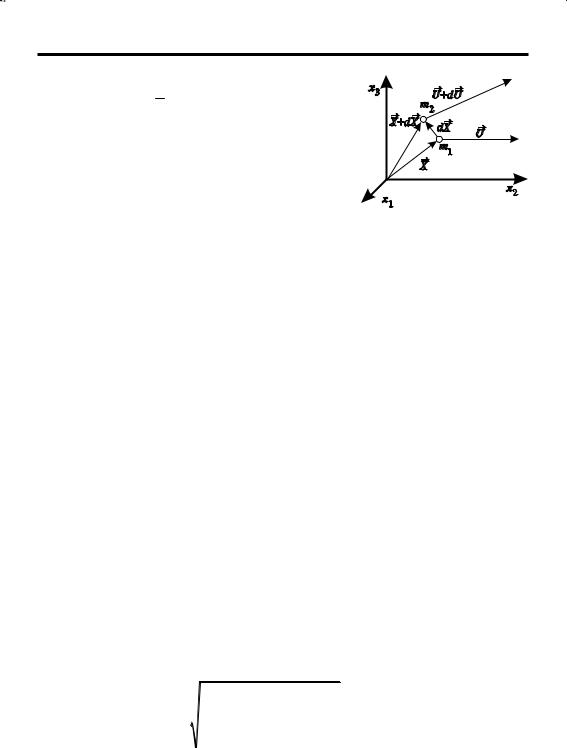
каженияU совпадают. Это позволяет использовать обобщенное безотноси тельное множество координат xi (рис. 13) вместо Li или Ei с оператором У. Р. Гамильтона в виде (П1.74). В отличие от рассмотренных в пп. 1.2.2 и 1.2.3 теорий конечных деформаций, построенная на допущении (1.2.69) теория называется теорией малых деформаций. В рамках этой теории ДС окрестности точки характеризуется тензором малых деформаций (в дальнейшем – просто тензором де формаций)
52
|
|
|
|
|
|
1.2. КИНЕМАТИКА |
7 |
>>Η |
ik |
|
U U , |
(1.2.70) |
|
Η |
|
|
|
|
|
|
|
|
|
|
|
|
|
который получается из тензоров конечных дефор |
|
|||||
маций (1.2.42) или (1.2.59) опусканием вследствие |
|
|||||
малости квадратичных слагаемых и заменой лагран |
|
|||||
жевых Li или эйлеровых Ei координат соответствен |
|
|||||
но на обобщенные координаты xi. Запись (1.2.70) |
Рис. 16. Характеристики механи |
|||||
тензора малых деформаций через перемещение на |
||||||
зывается кинематической формулой О. Коши. |
ческого движения |
|||||
|
||||||
Рассмотрим движение двух материальных час |
|
|||||
тиц m1, m2 (рис. 16) и разложим матрицу тензора искажения в (1.2.6) на симмет |
||||||
ричную (П.1.49) и альтернативную (П1.50) части. Тогда вектор искажения (1.2.6) |
||||||
представляется в виде |
|
|
||||
dU |
1 |
( U U ) dx |
1 |
( U U ) dx . |
(1.2.71) |
|
|
||||
2 |
2 |
|
|
||
Видно, что симметричная часть тензора искажения точно совпадает с тензо ром малых деформаций (1.2.70). Альтернативная часть TΖ тензора искажения в (1.2.71), называемая тензором жесткого поворота, связана с вращением окрес тности частицы как жесткого тела, что подтверждается соотношением ( U U ) dx ( uU) dx , совпадающим с точностью до символики с тождеством (П1.86) с учетом (П1.84). Значит, симметричная часть тензора ис каженияU характеризует малую деформацию в окрестности материальной частицы, а альтернативная часть – жесткое вращение:
dU T dx T dx . |
(1.2.72) |
|
Η |
Ζ |
|
Физический смысл компонент тензора малых деформаций становится яс ным, если их рассматривать как частный случай компонент тензоров (1.2.42) и (1.2.59) при условии (1.2.69). Поэтому диагональные компоненты тензора ма лых деформаций называют линейными деформациями, а боковые компоненты –
сдвиговыми деформациями, или деформациями сдвига.
Из формулы (1.2.33) с помощью (1.2.28), (1.2.40), (1.2.42) в координатах xi
получим приближенное значение относительной деформации |
|
||||||||||||
Gi |
|
|
|
|
1 |
|
|
|
|
1| |
wUi |
. |
(1.2.73) |
|
|
|
·2 |
|
|
|
|
|
|
||||
§ |
|
wUi |
|
wUk |
|
wUk |
|
|
wxi |
|
|||
¨1 |
¸ |
|
|
|
|
|
|
||||||
wx |
wx |
wx |
|
||||||||||
© |
|
¹ |
|
|
|
||||||||
|
i |
|
i |
|
i |
|
|||||||
53
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
Здесь второе слагаемое под знаком радикала опускается как величина второго порядка малости по сравнению с первым слагаемым. Аналогичный вывод с помощью (1.2.46), (1.2.57) и (1.2.59) при тех же допущениях получается, если использовать формулу (1.2.51):
δi = |
|
|
|
1 |
|
|
|
|
−1 ≈ |
∂Ui |
. |
(1.2.74) |
|
|
2 |
|
|
|
|
|
|
||||
|
|
|
∂Uk |
|
∂Uk |
|
|
∂xi |
|
|||
|
1 |
− |
∂Ui |
− |
|
|
|
|
|
|
||
∂xi ∂xi |
|
|
|
|||||||||
|
|
|
∂xi |
|
|
|
|
|||||
Видно, что величины (1.2.73), (1.2.74) совпадают с диагональными компонентами (i = k) тензора (1.2.70):
δi ≈ εi, |
(1.2.75) |
т. е. i-е диагональные компоненты тензора малых деформаций равны относительному изменению длины волокна, параллельного оси xi. Поэтому в технологических расчетах относительную деформацию часто оценивают с помощью линейных деформаций.
Теперь с помощью (1.2.35), (1.2.40) и (1.2.42) перейдем к изучению изменения угла между волокнами, параллельными осям xi и xj (i ≠ j). По аналогии с представлением δi в виде (1.2.73)
|
|
|
|
|
|
|
∂U |
i + |
|
∂U j |
+ |
|
∂U |
m |
|
∂U |
m |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
∂xi |
|
|
|
|
|
|
∂xj |
|
|
|
|
|
|
∂U |
|
∂U j |
|
||||||||
sin γij = |
|
|
|
|
|
|
∂xj |
|
|
|
|
|
|
∂xi |
|
|
|
|
|
|
|
≈ |
i + |
. (1.2.76) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂xi |
||||
|
|
|
|
∂U |
i |
|
2 |
∂U |
k |
|
∂U |
k |
|
|
|
|
|
∂U j |
|
|
2 |
∂U |
s |
∂U |
s |
∂xj |
|
||||||||
|
|
+ |
+ |
|
|
|
+ |
|
+ |
|
|
|
|
||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
∂x |
∂x |
|
|
∂x |
|
|
|
|
∂x |
|
|
∂x |
∂x |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
j |
j |
|
|
|
|
||||||||||||
|
|
|
|
i |
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Полагая вследствие малости γij выполнение условия sinγij ≈ γij и сравнивая |
|
(1.2.76) с боковыми (i ≠ j) компонентами тензора (1.2.70), находим: |
|
γij ≈ 2εij. |
(1.2.77) |
Связь боковых компонент тензора (1.2.70) с изменением угловых размеров можно получить из (1.2.53) с помощью (1.2.57) и (1.2.59):
|
|
|
|
|
|
|
|
∂U |
m |
|
+ |
|
∂U |
m |
− |
∂U |
i |
∂U j |
|
|
|
|
|
|
|
|
|
∂U j |
|||||||||
|
|
|
|
|
|
|
|
∂xi |
|
∂x j |
|
∂xi |
|
|
|
|
|
|
∂U |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂x j |
|
|
|
|
|
|
|
i + |
|||||||||||||||||
sin γ |
ij |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
≈ − |
|
|
|
. |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
∂x |
|
∂x |
||||||
|
|
|
|
∂U |
|
|
∂U |
|
|
∂U |
|
|
|
|
|
∂U j |
|
∂U |
|
∂U |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
k |
|
k |
|
|
|
|
|
|
|
j |
i |
|
|||||||||||||||||||
|
|
|
1 |
− |
|
i |
|
+ |
|
|
|
|
|
|
|
1− |
|
|
|
|
|
|
+ |
|
s |
|
s |
|
|
|
|
|
|
||||
|
|
∂x |
|
∂x |
|
|
∂x |
|
|
∂x |
|
|
∂x |
∂x |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
j |
j |
|
|
|
|
|
|
||||||||||
|
|
|
|
i |
|
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
54
1.2. КИНЕМАТИКА
В этом случае сдвиговые деформации νij ≈ – 2εij (i ≠ j). Если сравнивать этот результат с (1.2.77), то при одинаковых по абсолютной величине сдвиговых деформациях (||γij|| = ||νij||) имеем различие в знаках, которое переносится в теорию малых деформаций из материального и пространственного представлений движения. Например, если острый угол между недеформированными волокнами в процессе движения преобразуется в прямой, то поворот волокон происходит в одном направлении. Если же острый угол между волокнами после деформации получается из прямого угла, то поворот осуществляется в обратную сторону. Таким образом, в рассматриваемом случае γij= – νij и абсолютные значения боковых компонент тензора малых деформаций в обоих случаях совпадают.
Тензор малых деформаций поворотом координат можно привести к диагональному виду (П1.61)
ε1 |
0 |
0 |
|
|
Tε = 0 |
ε2 |
0 |
, |
(1.2.78) |
0 |
0 |
ε3 |
|
|
где главные деформации εi определяются из (П1.58) и удовлетворяют соотношению (П1.62):
|
|
|
|
|
|
|
|
|
|
|
ε1 ≥ ε2 ≥ ε3. |
(1.2.79) |
|
|
|
Для малых деформаций якобиан (1.2.14), записанный с помощью (1.2.11) как |
|||||||||||
J |
L |
= |
|
∂Ui + δ |
ik |
|
, вследствие малости частных производных (1.2.69) представля- |
||||||
|
|
||||||||||||
|
|
|
∂x |
|
|
|
|
||||||
|
|
|
|
|
k |
|
|
|
|
|
|||
ется в виде |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
JL ≈ 1 + Nε0, |
(1.2.80) |
|
где ε |
0 |
= |
εii |
|
– средняя деформация (П1.55). Ясно, что условие постоянства объе- |
||||||||
N |
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
ма (1.2.39) в данном случае имеет вид ε0 = 0 или |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
U = 0 . |
(1.2.81) |
|
Такой же результат легко получается с помощью (1.2.22) из якобиана (1.2.20)
J |
E |
= |
δ |
ik |
− |
∂Ui |
, который представляется в виде |
|
|
|
|
∂x |
|
||
|
|
|
|
|
|
k |
|
55
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
JE = 1 – Nε0. |
(1.2.82) |
Отличие знака в этом выражении от знака в (1.2.80) опять переносится в теорию малых деформаций из материального и пространственного представлений движения в теории конечных деформаций.
Из (П1.54) с помощью среднего значения ε0 тензора Tε определяем сферичес
кую часть тензора деформаций
Sε = ε0Tδ . |
(1.2.83) |
Отсюда ясно, что сферическая часть тензора малых деформаций характеризует
изменение объема. Оставшаяся часть (П1.56), называемая девиатором деформаций
Dε = [[eij]] = Tε – Sε, |
(1.2.84) |
характеризует изменение формы окрестности материальной частицы.
Теперь вектор искажения (1.2.72) можно рассматривать как сумму трех векторов
dU = Dε dx + Sε dx + Tω dx , |
(1.2.85) |
характеризующих изменение формы, изменение объема и жесткое вращение окрестности материальной частицы соответственно, где Tω называется тензо
ром жесткого поворота.
В связи с тем, что для Sε любое направление осей координат является главным, главные направления Dε совпадают с главными направлениями Tε. Отметим, что первый инвариант (П1.60) любого девиатора (П1.56), в том числе и Dε, равен нулю, а остальные его инварианты в общем случае отличны от нуля:
eI = 0; eII = − 12 еkmekm ; eIII = єijke1ie2je3k.
Известно, что выбор множества осей координат является субъективным фактором. Однако свобода его выбора всегда связана с необходимостью решения поставленной задачи. В некоторых случаях в качестве независимых координат можно назначить компоненты тензора деформации или связанные с ним величины. В частности, в теории малых деформаций удобно применять шестимерное пространство А. А. Ильюшина, в котором параметры движения характеризуются средней деформацией ε0 (1.2.80) и пятью независимыми компонентами eij девиатора Dε деформаций. С помощью замены
Γ1 |
|
β + |
π |
– e22sinβ]; Γ2 |
|
β + |
π |
= 2[e11cos |
|
= 2[e11cos |
+ e22sinβ]; |
||||
|
|
|
6 |
|
|
|
6 |
|
|
|
Г3 = 2е12; Г4 = 2е23; Г5 = 2е31 |
|
(1.2.86) |
||
56
1.2. КИНЕМАТИКА
для произвольного значения параметра β, не зависящего от времени, характеристики движения представляются скалярной величиной ε0 и пятимерным вектором Г = Гiei . Модуль такого вектора
Г = 2e e = 2 || eII || |
(1.2.87) |
ij ij |
|
называется интенсивностью сдвиговых деформаций.
Задачи к пп. 1.2.4
Задача 1.2.4.1. Показать, что полную деформацию, полученную в результате двух последовательных малых деформаций, можно рассматривать как сумму этих деформаций, при этом порядок, в котором происходят оба движения, не влияет на полную деформацию.
Решение. Пусть в результате первого перемещения U
dE = dL + dU |
i |
= |
|
δ |
ik |
∂Ui dL |
||
i |
i |
|
|
|
|
k . |
||
|
|
|
|
|
|
|
∂Lk |
|
Для второго перемещения U ′ результат первого перемещения является исходным. Поэтому dL′j = dE j и в результате второго перемещения U ′ имеем
dE′j = dE j + dU ′j = |
|
|
|
∂U ′j |
|
||||||||||||
|
δij |
|
|
|
|
|
dEi . |
||||||||||
|
|
∂Ei |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тогда в результате суммарного перемещения U ′′ =U ′ +U |
|||||||||||||||||
dE′j |
|
|
|
∂U |
i |
|
|
|
|
|
|
∂U ′j |
|||||
= |
δik + |
|
|
|
δij + |
|
|
|
|
dLk |
|||||||
|
|
|
∂Ei |
|
|||||||||||||
|
|
|
|
∂Lk |
|
|
|
|
|
|
|
|
|||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂U j |
|
∂U |
′j |
|
∂Ui ∂U ′j |
|||||||||
dE′j = δ jk |
+ |
|
|
+ |
|
|
|
+ |
|
|
|
|
|
|
|
dLk . |
|
∂Lk |
∂Ek |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
∂Lk ∂Ei |
||||||||||||
Модули компонент градиентов перемещений, в соответствии с определением малых деформаций, должны быть малы по сравнению с единицей. Поэтому в последней записи произведениями компонент градиентов перемещений, как
57
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
малыми более высокого (в сравнении с линейными слагаемыми) порядка, пренебрегаем. Кроме того, не отдавая в этом случае предпочтения ни лагранжевым, ни эйлеровым координатам, заменяем их обобщенными координатами xi . Тогда из последней формулы получаем
|
|
∂U j |
|
∂U ′j |
|
dx′j = |
δjk + |
|
+ |
|
|
∂x |
∂x |
||||
|
|
|
|||
|
k |
|
k |
С другой стороны,
dE′′j = dLj + dU ′′j
dxk
= δ
=δjk + ∂∂Ux ′′j dxk .k
jk ∂∂U ′′j dLk Lk
или для малых деформаций
|
|
∂U ′′j |
|
|
dx′′j = |
δjk + |
|
dxk . |
|
∂x |
||||
|
|
|
||
|
k |
Сравнивая последнее выражение с dx′j , устанавливаем, что полная малая деформация в результате перемещения U ′′ равна сумме малых деформаций, получаемых последовательными перемещениями U и U ′ , так как dx′j = dx′′j .
Задача 1.2.4.2. В эйлеровых координатах E1, E2 задан вектор перемещения
|
|
E |
|
|
|
|
E |
2 |
|
|
U = a |
|
1 |
|
e |
+ |
|
|
e |
, |
|
E2 |
+ |
|
E2 |
+ E2 |
||||||
|
E2 1 |
2 |
|
|||||||
|
1 |
|
2 |
|
|
1 |
|
2 |
|
|
где константа a имеет размерность квадрата единицы длины. В области малых деформаций определить компоненты тензора конечных деформаций Л. Эйлера и компоненты тензора малых деформаций.
Решение. Определим компоненты тензора конечных деформаций Л. Эйлера:
|
|
1 |
|
|
∂U |
|
∂U |
2 |
|
∂U |
2 |
2 |
|
E2 |
− E2 |
|
|
1 |
|
|
E11 |
= |
|
|
2 |
1 |
− |
1 |
|
− |
|
|
|
= a |
2 |
1 |
− |
|
|
; |
|
2 |
∂E |
|
(E2 |
+ E2 )2 |
2(E2 |
+ E2 )2 |
||||||||||||||
|
|
|
|
∂E |
|
∂E |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
1 |
1 |
1 |
|
2 |
1 |
|
2 |
1 |
|||||||
58

1.2. КИНЕМАТИКА
|
|
1 |
|
|
∂U |
2 |
|
∂U |
2 |
|
∂U |
2 |
2 |
|
E2 |
− E2 |
|
|
1 |
|
||
E22 |
= |
|
|
2 |
|
− |
|
1 |
|
− |
|
|
|
= a |
1 |
2 |
− |
|
|
; |
||
2 |
∂E |
|
∂E |
∂E |
|
(E2 |
+ E2 )2 |
2(E2 |
+ E2 )2 |
|||||||||||||
|
|
|
|
2 |
|
2 |
|
|
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
2 |
1 |
|
2 |
1 |
|||||||||
E |
= |
1 |
|
∂U1 |
+ |
∂U2 |
− ∂U1 ∂U1 − |
∂U2 |
∂U2 |
|
= −a |
2E1E2 |
. |
|
|
|
|
|
|
|
|||||||||
12 |
|
2 |
∂E |
|
∂E |
∂E ∂E ∂E ∂E |
|
(E2 |
+ E2 )2 |
|||||
|
|
|
|
|
|
|||||||||
|
|
|
2 |
1 |
1 2 |
1 2 |
|
2 |
1 |
|
||||
В области || dE || >> 1, где деформации малы, можно ввести обобщенные координаты xi. Перемещение в этих координатах
|
|
x1 |
|
|
|
|
x2 |
|
|
U = a |
|
|
e |
+ |
|
e |
. |
||
|
|
|
x2 |
+ x2 |
|||||
x2 |
+ x2 1 |
2 |
|
||||||
|
1 |
|
2 |
|
|
1 |
2 |
|
|
Тогда по кинематической формуле О. Коши (1.2.70)
|
1 |
|
|
|
|
εik = |
|
∂Ui + |
∂Uk |
||
2 |
|||||
|
|
∂ xk |
∂ xi |
определим малые деформации
|
∂U |
|
x2 |
− x2 |
|
|
|
∂U |
2 |
|
x2 |
− x2 |
|
ε = |
1 |
= a |
2 |
1 |
; ε |
|
= |
|
= a |
1 |
2 |
; |
|
(x2 |
+ x2 )2 |
|
∂x |
|
(x2 |
+ x2 )2 |
|||||||
11 |
∂x |
|
|
22 |
|
|
|
|
|||||
|
1 |
|
2 |
1 |
|
|
|
2 |
|
2 |
1 |
|
|
ε = ε |
|
= |
1 |
|
∂U1 + |
∂U2 |
|
= −a |
2x1x2 |
. |
|||
21 |
|
|
|
|
|||||||||
|
12 |
2 |
∂x |
∂x |
|
|
(x2 |
+ x2 )2 |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
2 |
1 |
|
|
2 |
1 |
|
||
Сравнивая Eik и εik, находим, что при || E || |
≥ 1 или || x || ≥ 1 имеем εik≈Eik. |
||||||||||||
Например, в точке n(1, 2) при a = 1 имеем |
|
|
|
|
|||||||||
T = 0,1128 |
|
−0,16 |
; T |
|
= |
0,12 |
−0,16 . |
||||||
E |
−0,16 |
|
0,1128 |
ε |
|
−0,16 |
0,12 |
||||||
|
|
|
|
|
|||||||||
Таким образом, в окрестности рассматриваемой точки модуль максимальной относительной ошибки при замене конечных деформаций Л. Эйлера малыми деформациями не превышает 7%.
59
1. МЕХАНИКА СПЛОШНЫХ КОМПОЗИТНЫХ СРЕД
Задача 1.2.4.2. В области малых деформаций по заданному полю перемещений
|
|
x1 |
|
|
|
|
x2 |
|
|
3 |
|
|
|
U = b |
|
|
e |
+ |
|
e |
+ |
e |
|
, |
|||
|
|
|
x2 |
+ x2 |
x |
||||||||
x2 |
+ x2 1 |
2 |
|
3 |
|
|
|||||||
|
1 |
|
2 |
|
|
1 |
2 |
|
|
3 |
|
|
|
где константа b = 1 имеет размерность квадрата единицы длины, в окрестности точки n(1, 2, 4) определить:
1)составляющие механического движения;
2)девиатор Dε и сферическую часть Sε тензора деформаций Tε;
3)главные компоненты εj тензора деформаций Tε;
4)интенсивность сдвиговых деформаций Г.
Решение. 1. Поступательное движение в заданной точке характеризуется вектором перемещения
U = 0,2e1 + 0,4e2 + 0,75e3.
Жесткий поворот окрестности материальной частицы в заданной точке от-
сутствует, так как альтернативная часть Tω (1.2.85) тензора дисторции |
dU |
(1.2.6) |
||||||
dx |
||||||||
|
|
|
|
|
|
|
||
является нулевым тензором: |
|
|
|
|
|
|
|
|
T = |
1 |
∂Ui − ∂Uk =[[0]]. |
|
|
||||
|
|
|
||||||
ω |
2 |
|
∂ xk |
∂ xi |
|
|
|
|
|
|
|
|
|
||||
Малая деформация характеризуется тензором (1.2.70): |
|
|
||||||
|
|
|
0,12 |
−0,16 |
0 |
|
|
|
Tε =[[εik ]] = |
−0,16 |
−0,12 |
0 . |
|
|
|||
|
|
|
0 |
0 |
0,1875 |
|
|
|
2. Для определения сферической части Sε тензора малых деформаций Tε сначала найдем объемную деформацию ε = εikδik = ε11 + ε22 + ε33 = 0,1875. Тогда сферическая часть тензора малых деформаций (1.2.83)
60