

§5. Вращение тела вокруг неподвижной оси
Пусть за бесконечно
малый промежуток времени
![]() твердое тело повернулось вокруг оси
твердое тело повернулось вокруг оси![]() на угол
на угол![]() (см. рис. 1.4). Вектор радиуса вращения
обозначим
(см. рис. 1.4). Вектор радиуса вращения
обозначим![]() ,
радиус–вектор точки
,
радиус–вектор точки![]() ––
––![]() ,
а перемещение некоторой точки
,
а перемещение некоторой точки![]() твердого тела –
твердого тела –![]() .
.
Вектором угла
поворота
![]() называется вектор, направленный по оси
вращения, а его величина равна углу
поворота
называется вектор, направленный по оси
вращения, а его величина равна углу
поворота![]() ,
измеренного в радианах.Направление
вектора
,
измеренного в радианах.Направление
вектора
![]() определяют по правилу буравчика.
Вращаем буравчик по направлению вращения
тела при этом направление его
поступательного движение укажет
направление вектора угла поворота
определяют по правилу буравчика.
Вращаем буравчик по направлению вращения
тела при этом направление его
поступательного движение укажет
направление вектора угла поворота
![]() .
.
Из
рис. 1.4 видно, что величина бесконечно
малого перемещения
![]() и угол поворота
и угол поворота![]() связаны соотношением
связаны соотношением
![]() . (1.25)
. (1.25)
Справедливо также и векторное равенство:
![]() . (1.26)
. (1.26)
Для характеристики быстроты изменения угла поворота вводят понятие вектора угловой скорости. Угловая скорость есть производная от угла поворота по времени:
![]() .
(1.27)
.
(1.27)
Вектор угловой
скорости направлен по оси вращения, его
направление совпадает с направлением
вектора бесконечно малого поворота
![]() .
.
Вектор углового ускорения характеризует быстроту изменения вектора угловой скорости, и находится как производная от вектора угловой скорости по времени:
![]() .
(1.28)
.
(1.28)
Направление вектора
![]() совпадает с направлением вектора
бесконечно малого изменения угловой
скорости
совпадает с направлением вектора
бесконечно малого изменения угловой
скорости![]() .При ускоренном
характере вращения тела направление
вектора углового ускорение совпадает
с направлением векторов бесконечно
малого угла поворота и угловой скорости,
при замедленном характере вращения
вектор углового ускорения направлен
против вектора угловой скорости.
.При ускоренном
характере вращения тела направление
вектора углового ускорение совпадает
с направлением векторов бесконечно
малого угла поворота и угловой скорости,
при замедленном характере вращения
вектор углового ускорения направлен
против вектора угловой скорости.
Уравнением вращения тела вокруг неподвижной оси является зависимость вектора угла поворота от времени:
![]() .
.
При решении задач используется проекция этого равенства на ось вращения (ось OZ). Ось OZ направляют по вектору угла поворота.
Примеры уравнений вращения тела вокруг неподвижной оси
Равномерное
вращение тела (![]() ):
):
![]() , (1.29)
, (1.29)
где
![]() величина угла поворота в начальный
момент времени,
величина угла поворота в начальный
момент времени,![]() величина
вектора угловой скорости.
величина
вектора угловой скорости.
Вращением с
постоянным угловым ускорением (![]() ):
):
![]() ,
(1.30)
,
(1.30)
где
![]() проекция вектора углового ускорения
на ось OZ.
проекция вектора углового ускорения
на ось OZ.
§6. Связь между линейными и угловыми величинами
Модуль вектора
перемещения
![]() и изменение угла поворота
и изменение угла поворота![]() связаны
соотношением:
связаны
соотношением:
![]() ,
(1.31)
,
(1.31)
где
![]() радиус–вектор точки
радиус–вектор точки![]() ,
,![]() ее радиус вращения (см. рис. 1.4).
ее радиус вращения (см. рис. 1.4).
Вектор линейной
скорости
![]() и вектор угловой скорости
и вектор угловой скорости![]() связаны векторным равенством:
связаны векторным равенством:
![]() .
(1.32)
.
(1.32)
В скалярном виде справедливо равенство:
![]() . (1.33)
. (1.33)
Для вектора полного
ускорения
![]() справедливы соотношения (1.20)–(1.23), и,
кроме того, имеем следующее векторное
равенство:
справедливы соотношения (1.20)–(1.23), и,
кроме того, имеем следующее векторное
равенство:
![]() ,
(1.34)
,
(1.34)
где
![]() вектор тангенциального ускорения,
вектор тангенциального ускорения,![]() вектор нормального ускорения.
вектор нормального ускорения.
Проекции вектора
![]() на орты
на орты![]() и
и![]() (см. рис. 1.3) равны:
(см. рис. 1.3) равны:
![]() ,
,
![]() .
(1.35)
.
(1.35)
Модуль полного ускорения равен:
![]() . (1.36)
. (1.36)
§7. Плоское движение твердого тела
 Плоское
движение – такое движение, при котором
траектории всех точек тела лежат в
параллельных плоскостях неподвижных
в некоторой системе отсчета. Примером
плоского движения служит качение
цилиндра по плоскости. Такое движение
твердого тела можно представить как
результат сложения двух движений,
поступательного и вращательного. Выберем
две системы отсчета
Плоское
движение – такое движение, при котором
траектории всех точек тела лежат в
параллельных плоскостях неподвижных
в некоторой системе отсчета. Примером
плоского движения служит качение
цилиндра по плоскости. Такое движение
твердого тела можно представить как
результат сложения двух движений,
поступательного и вращательного. Выберем
две системы отсчета
![]() и
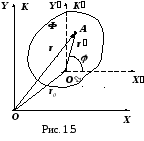
и![]() (см. рис. 1.5). Пусть система
(см. рис. 1.5). Пусть система![]() ,
связанная жестко с точкой
,
связанная жестко с точкой![]() твердого тела движется поступательно
относительно системы
твердого тела движется поступательно
относительно системы![]() (см. рис 1.5). При плоском движении тела
его положение в процессе движения
определяется положением такого сечения
тела
(см. рис 1.5). При плоском движении тела
его положение в процессе движения
определяется положением такого сечения
тела![]() ,
которое лежит в плоскости траектории
,
которое лежит в плоскости траектории![]() некоторой точки
некоторой точки![]() .
.
Положение сечения
![]() в системе отсчета
в системе отсчета![]() определяется радиус–вектором
определяется радиус–вектором![]() произвольной ее точки
произвольной ее точки![]() и углом
и углом![]() между осью
между осью![]() и вектором
и вектором![]() точки
точки![]() .
Заметим, что для абсолютно твердого
тела модуль вектора
.
Заметим, что для абсолютно твердого
тела модуль вектора![]() не зависит от времени (вектор
не зависит от времени (вектор![]() может только вращаться). Поэтому движение
рассматриваемого сечения
может только вращаться). Поэтому движение
рассматриваемого сечения![]() в системе
в системе![]() описывается уравнениями:
описывается уравнениями:
![]() .
(1.37)
.
(1.37)
Для
точки
![]() рассматриваемого сечения векторы
рассматриваемого сечения векторы![]() и
и![]() в системах отсчета
в системах отсчета![]() и
и![]() связаны соотношением:
связаны соотношением:
![]() ,
(1.38)
,
(1.38)
и для бесконечно малых перемещений имеем равенство:
![]() , (1.39)
, (1.39)
г де
де![]() перемещение точки
перемещение точки![]() в системе
в системе![]() ,
,![]() перемещение точки
перемещение точки![]() в системе
в системе![]() ,
,![]() перемещение начала отсчета (точка
перемещение начала отсчета (точка![]() )
системы
)
системы![]() относительно
относительно![]() .
.
Скорость
точки
![]() в системе отсчета
в системе отсчета![]() и угловая скорость ее в системе
и угловая скорость ее в системе![]() связаны соотношением:
связаны соотношением:
![]() . (1.40)
. (1.40)
Из
(1.40) видно, что скорость любой точки
рассматриваемого сечения складывается
из скорости поступательного движения
![]() произвольной точки
произвольной точки![]() этого сечения и линейной скорости
этого сечения и линейной скорости![]() ,
обусловленной вращением вектора
,
обусловленной вращением вектора![]() вокруг точки
вокруг точки![]() .
.
Очевидно,
что векторы
![]() и
и![]() лежат в плоскости сечения
лежат в плоскости сечения![]() .
Следовательно, можно найти такую точку
.
Следовательно, можно найти такую точку![]() (не обязательно принадлежащую данному
телу), линейная скорость которой в
системе
(не обязательно принадлежащую данному
телу), линейная скорость которой в
системе![]() равна нулю. Это достигается тогда, когда
равна нулю. Это достигается тогда, когда![]() (см. рис. 1.6). Ось, перпендикулярная сечению
(см. рис. 1.6). Ось, перпендикулярная сечению![]() и проходящая через точку
и проходящая через точку![]() ,
называют мгновенной осью вращения. В
этом случае плоское движение тела
сводится к чисто вращательному движению
вокруг мгновенной оси.
,
называют мгновенной осью вращения. В
этом случае плоское движение тела
сводится к чисто вращательному движению
вокруг мгновенной оси.