

Лабораторная работа № 1. Исследование электрической схемы замещения механического амортизатора
ЦЕЛЬ РАБОТЫ: ознакомиться с методом математического моделирования с использованием электрических схем замещения на примере механического колебательного узла.
1.1. Теоретическая часть
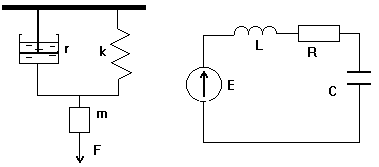
Механическая схема амортизатора представлена на рис. 1.1,а. Узел содержит пружину с коэффициентом жесткости kи масляный демпфер с коэффициентом тренияr. Масса всей системы равнаm. На систему действует внешняя силаF. Электрическая схема замещения амортизатора изображена на рис. 1.1,б.
а) б)
Рис. 1.1. Механическая схема амортизатора (а) и его схема замещения (б)
В данной задаче амортизатор (механическая цепь) является оригиналом, электрическая цепь – моделью. Механическая цепь на рис. 1.1,а описывается уравнением
![]() ,
(1.1)
,
(1.1)
где F– внешняя сила, Н;m– масса механического узла, кг;v– скорость, м/с;t– время, с;r– коэффициент сопротивления демпфера, Н.с/м;k– коэффициент упругости пружины, Н/м;См– механическая емкость пружины, м/Н.
Электрическая цепь на рис. 1.1,б описывается уравнением
![]() ,
(1.2)
,
(1.2)
где E– ЭДС, В;L– индуктивность, Гн;i– сила тока, А;τ– время, с;R– электрическое сопротивление, Ом;С– электрическая емкость, Ф.
Оба уравнения являются изоморфными, что позволяет применить к ним первую теорему подобия. То есть при определенных условиях электрическая цепь рис. 1.1,б может являться моделью механической цепи рис. 1.1,а. Для определения условий, критериев и масштабов подобия выполним определенные действия в следующем порядке:
Определим соответствие величин оригинала и модели:
![]() .
(1.3)
.
(1.3)
Введем масштабы подобия:
![]() .
(1.4)
.
(1.4)
Приведем оба уравнения к безразмерному виду:
![]() .
(1.5)
.
(1.5)
![]() .
(1.6)
.
(1.6)
Подставим во второе уравнение величины из первого уравнения с соответствующими масштабными коэффициентами:
![]() .
(1.7)
.
(1.7)
Получим
![]() .
(1.8)
.
(1.8)
Уравнение (1.8) тождественно уравнению (1.5) при выполнении следующих условий:
![]() (1.9)
(1.9)
Подставив вместо масштабов выражения (1.4), получим выражения для трех критериев подобия
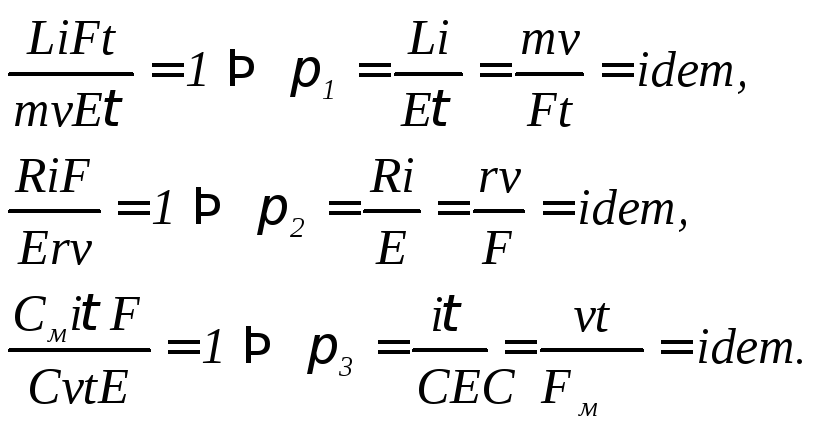 (1.10)
(1.10)
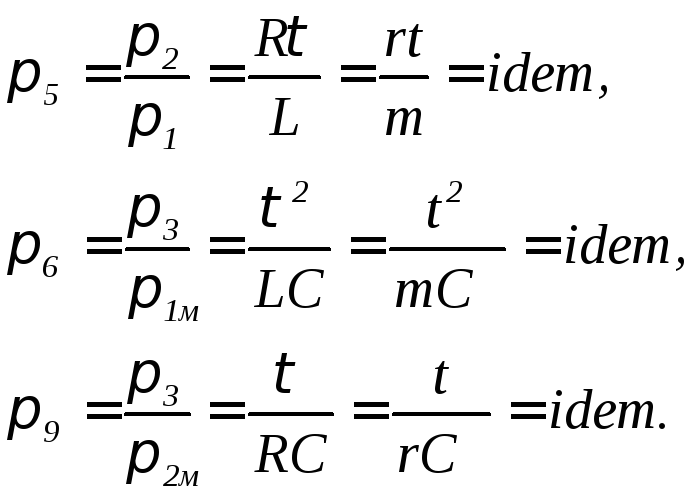
Если разделить все слагаемые уравнений (1.1)-(1.2) не на первое слагаемое, а на второе, то получим еще три критерия
![]() (1.11)
(1.11)
При делении на третье слагаемое получим
![]() (1.12)
(1.12)
При делении на четвертое слагаемое получим
![]() (1.13)
(1.13)
Анализ двенадцати критериев позволяет выявить повторяющиеся критерии и оставить всего шесть критериев: π1,π2, π3, π5, π6 и π9. Три из этих критериев являются независимыми, а три остальные – зависимыми. То есть дополнительные три критерия подобия можно было получить также путем комбинации трех изначально полученных критериев:
 (1.14)
(1.14)
Проведем анализ размерностей величин, входящих в уравнение оригинала (1.1):
 (1.15)
(1.15)
Анализ размерностей показывает, что размерности всех шести величин могут быть построены из трех основных размерностей системы СИ: кг, м, с. Это значит, что из шести масштабов подобия три масштаба являются независимыми, то есть их значения можно выбрать произвольным образом.
В качестве независимых
удобнее всего выбрать масштабы
![]() .
То есть при моделировании механической
цепи электрической схемой замещения
величины сопротивления, индуктивности
и емкости можно выбрать произвольным
образом.
.
То есть при моделировании механической
цепи электрической схемой замещения
величины сопротивления, индуктивности
и емкости можно выбрать произвольным
образом.
Остальные три масштаба оказываются зависимыми, то есть их значения должны быть получены на основе независимых масштабов решением системы уравнений (1.9):
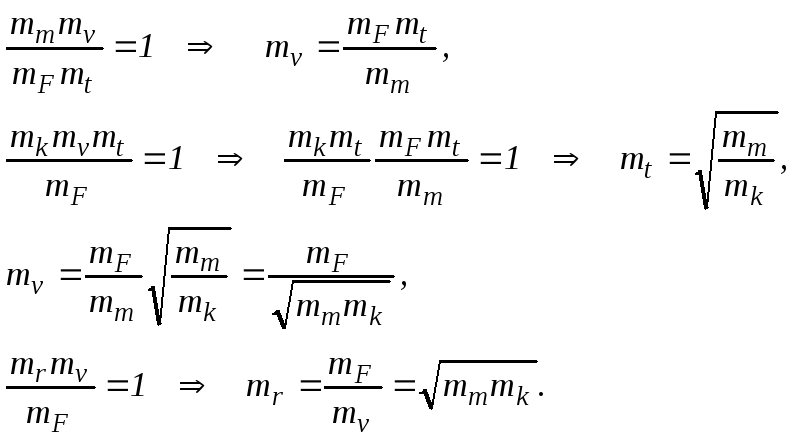 (1.16)
(1.16)
Задаваясь
произвольными значениями сопротивления,
индуктивности и емкости, для заданных
параметров механической цепи рассчитываем
независимые масштабы![]() .
Затем из (1.16) рассчитываются зависимые
масштабы
.
Затем из (1.16) рассчитываются зависимые
масштабы![]() и сопротивление
и сопротивление![]() .
Из этих элементов строится электрическая
цепь, процессы в которойi=f(τ)фиксируются осциллографом и с помощью
масштабов подобия пересчитываются в
зависимостьv=f(t).
Использование возможностей
Simulink
по совмещению электрической цепи со
структурной схемой позволяет получить
зависимость x=f(t)
путем интегрирования сигнала v=f(t).
.
Из этих элементов строится электрическая
цепь, процессы в которойi=f(τ)фиксируются осциллографом и с помощью
масштабов подобия пересчитываются в
зависимостьv=f(t).
Использование возможностей
Simulink
по совмещению электрической цепи со
структурной схемой позволяет получить
зависимость x=f(t)
путем интегрирования сигнала v=f(t).