

Glavy_1-7_1
.pdf
|
- 29 - |
|
|
|
|
||
|
|
|
|
|
|
||
|
D = |
|
X 2 + Y2 |
|
; |
|
(2.18) |
2) анализируют значение D следующим |
образом: |
|
|
|
|||
а) если D = 0, то |
|
|
|
||||
|
B = π Z / 2│Z│ , |
|
(2.19) |
||||
|
L = 0 , |
|
|
|
|||
|
H = Z sinB – a (1 – e² sin²B)1/ 2 ; |
|
(2.20) |
||||
б) если D > 0, то |
|
|
|
||||
|
La = arcsin(│Y │/ D) ; |
|
(2.21) |
||||
при этом |
|
|
|
||||
|
если Y < 0, X > 0, то L = 2π – La |
|
|
||||
|
если Y < 0, X < 0, то L = π + La |
|
|
||||
|
если Y > 0, X < 0, то L = π – La |
; |
(2.22) |
||||
|
если Y > 0, X > 0, то L = La |
|
|
||||
Формулы (2.22) справедливы для кругового счета. |
|
|
|
||||
3) |
анализируют значение Z : |
|
|
|
|||
a) |
если Z = 0, то |
|
|
|
|||
|
B = 0 ; |
|
|
|
|||
|
H = D – a ; |
|
|
(2.23) |
|||
б) во всех других случаях вычисления выполняют следующим образом: |
|
||||||
- находят вспомогательные величины r, c, p по формулам: |
|
|
|||||
|
r = (X ² + Y ² + Z ²)1/ 2 , |
|
(2.24) |
||||
|
c = arcsin(Z / r), |
|
|
(2.25) |
|||
|
p = e² a / 2 r ; |
|
|
(2.26) |
|||
- реализуют итеративный процесс: |
|
|
|
||||
|
s1 = 0 , |
|
|
(2.27) |
|||
|
b = c + s1 , |
|
|
(2.28 ) |
|||
|
s2 = arcsin(p sin(2 b) / (1 – e² sin²B)1/ 2) , |
(2.29) |
|||||
|
d = │ s2 – s1 │; |
|
|
(2.30) |
|||
если модуль разности d, определяемый по формуле (2.30), меньше установленного значения, то:
B = b , |
(2.31) |
H = D cosB + Z sinB – a (1 – e² sin²B)1/ 2; |
(2.32.) |
если модуль разности d равен или больше установленного значения, то
s1 = s2 ; |
(2.33.) |
и вычисления повторяют, начиная с формулы (2.21).
При преобразованиях координат в качестве допуска прекращения итеративного процесса принимают значение 0,0001″. В этом случае погрешность вычисления геодезической высоты не превышает 0,003 м.
Более удачным для программной реализации следует считать формулы Боуринга, в которых отпадает необходимость выполнения итераций.
Более удобный для программной реализации алгоритм преобразование пространственных прямоугольных координат в геодезические с использованием формулы Боуринга приведены в разделе 5 .
Оценить предел необходимой точности представляется целесообразным исходя из реальной точности геодезических сетей. В настоящее время, по результатам переуравнивания отечественной государственной геодезической сети, точность взаимного положения ее пунктов находится на уровне 30 - 50 см. С этой позиции приемлемой может считаться вычислительная погрешность преобразования координат в пределах 3 – 5 см, однако не исключены задачи, в которых может потребоваться еще более высокая точность.
-30 -
Внавигации и гидрографии в настоящее время предпочтение отдается дифференциальным формулам Молоденского, рекомендованные в специальной публикации SP-60 Международной
гидрографической Организации (IHO). Эти формулы не учитывают угловые элементы трансформации (ωx, ωy, ωz). Из-за этого погрешности преобразования координат могут достигать десятков метров. Кроме того, погрешности любых дифференциальных формул вблизи полюса возрастают, а для точки полюса эти формулы неприменимы.
Формулы (2.10) и (2.11), приведенные в Государственном стандарте (ГОСТ Р 51794–2001.– М.: 2001) лишены указанных недостатков и успешно работают в точке полюса и на экваторе.
Глава 3. СОЗВЕЗДИЯ СПУТНИКОВ
3.1. Орбитальные группировки GPS и ГЛОНАСС состоят из 24 спутников. Спутники в GPS расположены в шести (рис.3.1.), а ГЛОНАСС - в трех плоскостях развернутых соответственно через 60° и через 120° по долготе восходящего узла (табл. 3). Если все спутники системы перевести в одну плоскость, то они расположатся равномерно через 15° и образуют "хоровод" вокруг Земли. Каждый НИСЗ проходит по орбите около 167 000 км. Эксцентриситет орбит - около 0,02 + 0,001 - орбиты практически круговые.
Рис. 3.1. Орбиты НИСЗ Навстар.
Орбитальные параметры СРНС |
Таблица 3.1. |
|
|
||
Параметры |
ГЛОНАСС |
GPS |
Число ИСЗ в системе |
24 |
24 |
Число орбитальных плоскостей |
3 |
6 |
Наклон орбиты I (град) |
64.8 |
55 |
Период обращения Т |
11 час. 16 мин |
11 час.58 мин. |
Для круговых орбит имеем:
•угловая скорость обращения НИСЗ ωс = 2π/T ;
•радиус-вектор определяется формулой R3 = fМ3 / ωC2;
•линейная скорость перемещения вдоль орбиты V = ωC *R;
•средняя высота над земным шаром радиуса Rз
|
- 31 - |
Н = R - Rз; |
(3.1.) |
•радиус зоны видимости на земной поверхности S = β * Rз ;
•широта видимости "за полюсом" ( ϕ > 180° - (β+i);
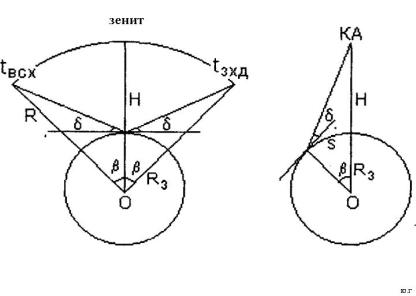
Геоцентрический угол, определяющий зону радиовидимости спутников, находим по теореме синусов
( рис. 3.2)
β = агссоs [соз(δ) / (1 + Н/Rз)] - δ , |
(3.2.) |
где δ - так называемая маска, минимальная высота спутника над горизонтом, устанавливаемая для надежного приема радиосигналов и ослабления влияния атмосферной рефракции.
Рис. 3.2. Зоны видимости со станции и с высоты ИСЗ
По этой же формуле рассчитывают зону видимости с ИСЗ. Наибольший путь сигнал проходит на предельно низкой высоте над горизонтом, наименьший - вертикально вниз с зенита.
Разность этих путей dS составлет :
dS = R * sin(β) / соs(δ) - Н. |
(3.3.) |
При разных траекториях время нахождения спутника над горизонтом различно. Когда НИСЗ |
|
проходит через зенит Z , разность моментов захода и восхода равна: |
|
tзхд - tвсх = 2β / ωC |
(3.4.) |
Значения рассмотренных выше величин, вычисленные при Т = 12 часам, |
δ =10° и |
Rз = 6371 км, даны в табл. 3.2.
В системах ТРАН3ИТ и ЦИКАДА было по 4 - 6 действующих спутников на полярных орбитах высотой около 1000 км. При таком числе спутников дискретность их появления в районе экватора составляла около 2 часов. В высоких широтах периодичность появления спутников уменьшалась. Спутники над горизонтом были видны около 20 минут. В новых системах спутников стало по 24, а высоты орбит увеличились до 20 тыс. км. Появилась возможность в любой точке земного шара одновременно видеть не менее 4 КА. При этом их орбиты стали стабильнее: на больших высотах нет атмосферы, а неоднородности строения Земли влияют слабее.

- 32 -
Таблица 3.2.
Показатели движения НИСЗ по круговой орбите
Параметр |
Показатель |
|
Угловая скорость обращения ωс |
0,5236 |
рад.час |
Радиус-вектор орбиты R |
26 600 |
км |
Скорость перемещения вдоль орбит орбиты V |
3,87 км/с |
|
Средняя высота над земным шаром Н |
20 200 |
км |
Геоцентр, угол зоны радио видимости β |
66,4° |
|
|
|
|
Радиус видимости на земной поверхности S |
7400 км |
|
Широта вид. НИСЗ по другую сторону полюса |
±58,6° |
|
Макс. разность путей радиосигналов dS |
4500 км |
|
Время вид. КА над горизонтом (t зхд – t всх ) |
4,4 час |
|
|
|
|
3.2. Азимуты и зенитные расстояния спутников.
Вычисление зенитных расстояний спутников и азимутов направлений на них необходимо для планирования измерений и для того, чтобы знать, где находится спутник в момент наблюдений. Вычисления геодезических азимута Аз и зенитного расстояния z НИСЗ производятся по формулам:
sin z * cos(Аз) |
|
sin(B)*cos(L) |
sin(B)*sin(L) |
cos(B) |
|
(Xi-Xa) / Rai |
|
sin z * sin(Аз) |
= |
-sin(L) |
cos(L) |
0 |
* |
(Yi-Ya) / Rai |
(3.5) |
cos z |
|
cos(В)*cos(L) |
cos(B)*sin(L) |
sin(B) |
|
(Zi-Za) / Rai |
|
|
|
|
|
|
|
|
|
где индекс i относится к НИСЗ, а индекс а - к станции наблюдений, Rai - расстояние от станции до НИСЗ ( Xi, Yi Ziгеоцентрические координаты НИСЗ)
Зенитное расстояние z вычисляется по третьему уравнению, азимут - по первым двум. Для наблюдений интерес представляют лишь НИСЗ, зенитные расстояния которых z <90° (находятся над горизонтам).
Глава 4. СИГНАЛЫ ИЗМЕРЕНИЙ И ПЕРЕДАЧИ ИНФОРМАЦИИ В СРНС
4.1. Сигналы, передаваемые со спутников.
В таблице 4.1. приведены характеристики сигналов НИСЗ. В GPS на каждом спутнике имеется эталонный генератор основной частоты fO = 10,23 МГц, из колебаний которого образуются сигналы, обозначаемые как L1 и L2. Они используются в качестве несущих для передачи кодов и посылки данных, а также для наиболее точных измерений дальностей фазовым методом. Их частоты и длины волн соответственно равны
fL1 = 154 fO (1575.42 Мгц), fL2 = 120 fO (1227.6 Мгц), λ1 = 19,0 см, λ2= 24,4 см. |
(4.1.) |
Для определений дальностей генерируют коды двух типов - Р и С/А. Код Р трактуется как точный (Precision) или защищенный (Protected). Он предназначен для военных и в любой момент может стать недоступным для остальных пользователей. С/А-код определяют как грубый (Coarse Aquisition), легко
доступный (Clear Access), легко обнаруживаемый (С1еаг Aquisition) или стандартный (S - Standart).
Он разработан для гражданского пользователя. В любое время может быть введен режим избирательного доступа SА (Selective Availability), при котором с целью понижения точности
- 33 -
измерений преднамеренно накладываются флюктуации на дальномерный код и вносятся дополнительные погрешности в эфемеридную информацию. В GPS предусмотрена еще одна мера защиты сигнала от несанкционированного пользователя - режим дополнительного шифрования АS (Anti Spoofing), когда Р-код при помощи нелинейной функции W(t) переводится в новый Y-код. В аппаратуре военных пользователей функция W(t) известна и используется при демодуляции Y-кода. Несущий сигнал L1 одновременно модулирован обоими С/А и Р кодами, но фазы этих модуляций сдвинуты относительно друг друга на 90°. Сигнал L2 модулирован Р-кодом и не несет С/А-кода. Оба сигнала L1 и L2 модулированы также данными, посылаемыми с НИСЗ.
Поток сообщений каждого спутника состоит из 25 блоков по 1500 бит. Каждый блок разбит на 5 подблоков по 300 бит. Трансляция подблока занимает 6 с, блока - 30 с, всего сообщения - 12,5 минут.
Вкаждом подблоке 10 слов по 30 бит, из которых первое слово содержит телеметрическую информацию, а второе - метки времени. За этими словами в подблоках 2 и 3 - эфемериды с кеплеровыми элементами орбиты спутника (они действительны лишь на короткое время для части его орбиты). Указанные подблоки повторяют в каждом блоке. Подблоки 4 и 5 несут данные о поправках на влияние ионосферы, параметры шкалы времени данного КА, сведения о здоровье спутника, а также альманах - сборник менее точных данных о местонахождении всех спутников. Альманах нужен для планирования и проектирования измерений. Информация подблоков 4 и 5 разделена на 25 страниц, передается постранично и повторяется через 12,5 минут. Наиболее важные сведения потока сообщений обычно обновляют через каждые 4 часа.
ВGPS все спутники работают на одних и тех же частотах, но каждый имеет свой код. Разделение сигналов кодовое.
ВГЛОНАСС все сигналы модулированы одними и теми же высокой (ВТ) или стандартной (СТ) точности кодами. Каждый спутник работает на собственных частотах. Разделение сигналов частотное. Значения частот:
fL1 = f01 +К ∆f1, |
fL2 = f02+К ∆f2, |
|
f01 = 1602 Мгц, |
f02 = 1246 Мгц, |
(4.2.) |
∆f1 = 0,5625 Мгц , |
∆f2 = 0,4375 Мгц, |
|
где номера К = 1 ÷ 24. В 1998 г., чтобы не мешать радиоастрономии, были исключены номера К = 16 ÷ 20. Спутники в противоположных полушариях получили одинаковые номера. К 2005 г. сохранят только номера К с 1 по 12, а позже - с -7 по +4. На каждом спутнике все сигналы формируют от одного эталонного генератора основной частоты f0 = 5,11 МГц. Несущие частоты находятся в соотношении fL1/ fL2 = 9/7. Длины волн λ01 = 18,7 см, λ02 = 24,1 см.
В ГЛОНАСС эфемериды содержат геоцентрические координаты спутника и другое, а альманах - литер К несущей частоты, время и долготу первого прохождения внутри суток восходящего узла, поправки к наклонению орбиты и периоду обращения, аргумент перигея и эксцентриситет орбиты, сдвиг шкалы времени и другое.
- 34 -
Характеристики сигналов, передаваемых НИСЗ
|
|
Таблица 4.1. |
|
|
|
Параметр |
ГЛОНАСС |
GPS |
|
|
|
Поляризация радиоволн |
круговая |
круговая |
|
|
|
Несущие частоты L1 |
1602,56+1615,5 Мгц |
1575,42 Мгц |
|
|
|
Несущие частоты L2 |
1246,44+1256,5 Мгц |
1227,6 Мгц |
|
|
|
Разделение сигналов |
частотное |
кодовое |
|
|
|
Объем потока сообщений |
7500 бит |
37500 бит |
|
|
|
Длит, передачи сообщения |
2,5 мин |
12,5 мин |
|
|
|
Скорость передачи данных |
50 зн/с |
50 зн/с |
|
|
|
Повторение меток времени |
2 с |
6 с |
|
|
|
4.2. Счет времени.
На спутниках эталонные генераторы высокостабильных колебаний одновременно являются хранителями времени. На борту каждого КА сигналы формируются от четырех цезиевых атомных стандартов с относительной нестабильностью частоты за сутки около 10-13. Передаваемые радиосигналы несут метки времени. По этим меткам на Земле при помощи станций службы времени производится сверка временных шкал с государственными эталонами. По ним же синхронизируют измерения и в аппаратуре пользователей.
Единицей измерений атомного времени АТ является атомная секунда - интервал времени, в течение которого совершается 9192631770 колебаний, соответствующих резонансной частоте энергетического перехода между уровнями сверхтонкой структуры основного состояния атома цезия-133.
Существует Международное атомное время ТАI (Time Atomic International) и Время спутниковой системы. Естественно их шкалы не совпадают. Время GPS (GPST) было установлено в полночь с 5 на 6 января 1980 г. и на 19 с меньше времени ТАI .
Атомное время течет равномерно и постепенно расходится с так называемым Всемирным временем UT (Universal Time), соответствующим среднему времени Гринвичского меридиана, которое соотнесено с суточным вращением Земли. Различают всемирное время UTО, получаемое из астрономических наблюдений, UT1 - исправленное за смещение мгновенного полюса относительно его среднего положения и UT2 - исправленное UT1 поправками за сезонные вариации вращения Земли.
Поскольку шкалы АТ и UT между собой не согласуются, введена промежуточная шкала так называемого координированного времени UTC (Universal Time Coordinated). UTC - атомное время,
которое корректируется на 1 с, когда его отклонение от UT1 превышает 0,9 с. Коррекция выполняется в последнюю секунду 31 декабря или 30 июня, или в обе даты. В ноябре 1985 г. GPSТ = UTC + 4 с . В июне 1993 г. GPST опережало UTC на 9 с. а в июле 1994 г. отличие составило 10 с. В июле 2005 года
- 35 -
различие составляет уже 13 с.
Вспутниковой навигационной аппаратуре (СНА) пользователя атомные стандарты частоты не используются. Устанавливать их в СНА было бы слишком дорого. Поэтому сдвиг шкалы времени в СНА может быть на несколько порядков больше, чем на НИСЗ. Однако, этот сдвиг практически одинаков по отношению к измерениям псевдодальностей до всех наблюдаемых в данный момент спутников. Это - постоянная систематическая погрешность. Ее можно исключить, если измерять псевдодальности как минимум до 4 спутников. Четыре измерения позволят вычислить четыре параметра - три координаты, определяющие положение приемника в земном пространстве, и сдвиг шкалы времени (уход частоты) в приемнике.
4.3.Дальномерные коды.
В70-х годах стали интенсивно развиваться методы измерения дальностей с использованием специальных кодов из нулей и единиц, строгое закономерное чередование которых воспринимается как случайный процесс. Такие коды называют псевдослучайными последовательностями (ПСП) или псевдослучайными кодами (Pseudo Random Code). Эти сигналы малой мощности, однако, благодаря строгой закономерности, их удается выделить из общего шумового фона даже при помощи миниатюрных антенн. Тем не менее, сигналы должны в несколько раз превышать уровень шума. Важным показателем является отношение сигнал/шум (SNR – Signal to Noice Ratio). Чем SNR больше, тем лучше. ПСП формируют при помощи сдвиговых регистров СР, управляемых тактовыми сигналами (рис. 6). В этих регистрах можно хранить числа в двоичном коде в виде 0 и 1. Регистры представляют собой набор последова-тельно соединенных ячеек - триггеров. Триггер - схема из двух полупроводниковых триодов, имеющая два состояния. Если один триод открыт, через него течет ток, то другой обязательно закрыт. Условно одному состоянию триггера соответствует 0, другому - 1. Подачей тактовых сигналов частоты fm эти состояния можно изменять. Частоту fm называют тактовой. Период следования тактовых сигналов:
Т m =1/ fm |
(4.3.) |
Тактовые сигналы частоты fm формируются из колебаний эталонного генератора частоты f0. Для стандартных кодов частота fm = f0 /10, а для точных кодов fm = f0. Точные коды довольно сложны. В GPS период их повторения равен 267 суткам и разделяется на части по семь суток. Каждый спутник имеет свой семисуточный фрагмент. Смена фрагментов на всех НИСЗ происходит еженедельно в 0 часов с субботы на воскресенье.
4.4. Определения псевдодальностей.
Допустим, что псевдослучайные последовательности на спутнике и в приемнике пользователя генерируют строго синхронно. Тогда приходящая от спутника кодовая последовательность с М символами и длительностью ТП будет запаздывать по отношению к такой же последовательности в аппаратуре наземной станции на время τ = t2,- t1, равное распространению сигнала от НИСЗ до СНА, где t1 - момент излучения сигнала на спутнике, t2 -момент его приема на наземной станции. В случае стандартного кода время τ равно целому числу N кодовых последовательностей длительности ТП и части этой последовательности, состоящей из целого числа m тактов периода Тm и некоторой доли такта ф:
τ = N* ТП + (m + ф)* Тm , где 0<ф<1, m<М. (4.4.)
- 36 -
Величины m и ф замеряют. Для этого последовательным сдвигом фазы местный сигнал "задерживают" на такое время (t1 - t2), чтобы принимаемый успел его "догнать" и оба они совпали (их корреляция максимальна).В действительности нет идеальной синхронизации колебаний на спутниках и на наземных станциях. Образно говоря, часы спешат или запаздывают в НИСЗ на величины ∆ tKA , а в СНА на величины ∆ tAП по сравнению с временем всей системы. Поэтому
t2 - t1 = τ |
+ ∆ tKA + ∆ tAП |
(4.5.) |
Умножая это выражение на скорость волн с, имеем: |
|
|
Р = R+ d KA + DAП, |
(4.6.) |
|
где Р - псевдодальность, |
R = с* τ - геометрическая дальность, d KA =с*∆ tKA и DAП = с*∆tAП - |
|
искажения дальности R из-за несинхронной работы станций системы. Псевдодальность |
||
Р = N*λП + dР, dР = (m+Ф)*λm, |
(4.7.) |
|
где λm = с/fm - длина тактовой волны, Ф - кодовая фаза, учитывающая также и временные задержки из-за несинхронности колебаний в спутниковой системе позиционирования, λП = Мс/ fm длина волны ПСП.
В формуле для Р имеется целое число N. определяющее неоднозначность измерения псевдодальности. Величина N равна целому числу миллисекунд распространения сигнала от спутника до наземной станции. Ее можно найти по известным координатам спутника и приближенным координатам наземной станции. При этом вычисленную псевдодальность надо знать с погрешностью
dPN < λП/3 < 100 км |
(4.8.) |
От длины тактовой волны зависит инструментальная погрешность измерений, которая для кодов стандартной точности может иметь величину, не превышающую
δPИ < 0,01*λ m ≈ 3 ÷ 6 m |
(4.9.) |
Длина тактовой волны кодов высокой точности в GPS около 29,3 м, а в ГЛОНАСС - 58,7 м. Расчетная инструментальная погрешность кодов высокой точности (ВТ) и Р- кодов не более 0,3 и 0,6 м соответственно. Аппаратура совершенствуется. Практически же коды С/А по точности не уступают Р кодам. Однако коды высокой точности обладают большими возможностями. В GPS период их ПСП Тп = 7 суткам, что значительно больше времени пробега радиоволной пути от КА до АП, равного примерно 65-85 миллисекундам. Дальность определима однозначно. Тем не менее, и в этом случае желательно заранее знать приближенные значения координат станции АП, так как для полного последовательного перебора местных Р-кодовых сигналов до момента совпадения их фазы с фазой принимаемых со спутника потребовалось бы очень большое время.
- 37 -
Глава 5. ОПРЕДЕЛЕНИЕ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ ПУНКТА ПО РЕЗУЛЬТАТАМ НАБЛЮДЕНИЙ НИСЗ
Определение координат пункта производится на основе измеренных псевдодальностей Di*, которые для данного спутникового сеанса может быть представлены в виде:
Di*= Di + δD
Di – фактическое расстояние от i-ого НИСЗ до пункта
δD – постоянная для всех измерений сеанса величина, обусловленная расхождением временных шкал НИСЗ и приемной аппаратуры пользователя.
Возможны различные варианты решения пространственной линейной засечки.
Рассмотрим прямой аналитический способ определения координат пункта по трем измеренным псевдодальностям, который используется как первое приближение для первоначального расчета координат пункта, когда его координаты неизвестны.
5.1. Прямое решение по трем псевдодальностям.
Для выполнения решения необходимо составить систему трех уравнений относительно X, Y, Z – геоцентрических координат определяемой станции:
(X - X1)² + (Y - Y1)² |
+ (Z - Z1)² - D1j =0 |
|
(X - X2 )² + (Y - Y2)² + (Z - Z2)² - D2j =0 |
(5.1) |
|
(X - X3)³ + (Y - Y2)² |
+ (Z - Z3)² - D3j =0 |
|
где Xi, Yi, Zi – геоцентрические координаты НИСЗ ( |
i-1,2,3), рассчитанные по эфемеридной |
|
информации. |
|
Если вычесть из второго уравнения системы ( 1) первое, а из третьего второе, то получим: |
|
X = А + В * Y + С * Z ; |
|
Y = А' + В' * X +С' * Z |
(5.2) |
А ={ (D1² – D2²) +(R2² -R1²) }/ 2*(X2-X1); B= -(Y2-Y1)/(X2-X1); C=-(Z2-Z1)/(X2-X1) |
(5.3) |
|
А' = { (D2² – D3 ²) +(R3² -R2²) }/ 2*(Y3-Y1);В'= - (X3-X2)/(Y3-Y2); C´ = - (Z3-Z2)/(Y3-Y2);
где R1, R2, R3 - геоцентрические расстояния до НИСЗ ( i -1,2,3)
Ri² = Xi² + Yi ² + Zi²
Далее, подставим Х из первого уравнения системы (2) во второе, а Y из второго в первое, тогда получаем:
X= P + Q * Z ;
Y= P' + Q´ * Z:
P = λ*(A +A´ *B), P´ = λ*(A´ +A *B´ ), λ=1/1- B*B´
Q = λ * (C + B *C´ ) |
(5.4) |
|
|
Q´ = λ* (C´+B´ *C ) |
(5.5) |
|
(5.6) |
Теперь X и Y из формул (4) подставим в первое уравнение системы (1). В результате |
|
Получим квадратное уравнение для вычисления Zj в виде: |
|
а * Z² + b * Z +с = 0; |
(5.7) |
где: а = 1+ Q² +(Q´)²; |
|
b = 2* {(P*Q + P´ * Q´ )-(Q*X1 + Q´ *Y1 )- Z1 }; |
(5.8) |
c = (P-X1)² +(P´ -Y1)² + Z1² - D1²; |
|
Решив уравнение (7) определим два значения Z . Второй корень (зеркальное отражение) |
|
легко отделяется. Располагая величиной Z легко вычислить X и Y из системы уравнений (4). Для перехода от X , Y, Z к геодезическим широте, долготе и высоте определяемого пункта могут быть использованы известные формулы высшей геодезии:
B = arctg ([Z +e² * N * sin B)/D ];
|
|
- 38 - |
|
|
|
L = arctg (Y /X ); |
|
|
(5.9) |
|
H = [D² +(Z + e² *N *sinB)]½- N |
|
e² = (2 -σ)* σ; |
|
|
D² = X² + Y²; N = a /(1- e² * sin² |
B)½; |
(5.10) |
|
где а – большая полуось эллипсоида, N –радиус кривизны первого вертикала, σ-сжатие; |
||||
|
Широта «В» в этих формулах может |
вычисляться методом |
последовательных |
|
приближений (см.п.2.3.7.), однако, для |
решения данной задачи удобнее пользоваться |
|||
алгоритмом Боуринга, практически не требующим приближений. |
|
|||
Порядок вычислений по формулам Боуринга следующий: |
|
|||
1. |
Вычисляем радиус параллели: |
|
r = (X² + Y ²)½ |
(5.11.) |
2. |
Вычисляем вспомогательный угол Q: |
Q=arctg( ε - Z/r); |
(5.12.) |
|
|
где |
ε = 1 / (1-e²)½ ; |
|
|
3.Вычисляем геодезическую широту В:
|
|
B=arctg [(Z + p*sin³ Q)/(r - q*cos³ Q)]; |
(5.13) |
|
где: |
p=a*e² /(1-e²)½; q = a*e²; |
|
4. |
Вычисляем долготу: |
L = arctg (Y/X) |
(5.14.) |
5. |
Вычисляем высоту над эллипсоидом: |
H= (Z / sinB) – N *(1-e² ) |
(5.15.) |
|
где: |
N = a /(1- e² * sin² B)½; |
|
Точность вычислений по формулам Боуринга обеспечивает погрешность не более 0.0017" и не требует выполнения последовательных приближений.
Прямой аналитический способ решения пространственной засечки по трем псевдодаль-ностям используется в современной спутниковой аппаратуре для расчета приближенных «счислимых» координат (X○, Y○, Z○) для получения начальных исходных данных о местоположение потребителя с целью их последующего уточнения с использованием более точного общего алгоритма обработки.
5.2. Общий алгоритм определения геодезических координат станции по неограниченному числу измеренных псевдодальностей.
Навигационную функцию Спутниковой радионавигационной системы (СРНС) второго поколения запишем в виде:
U ij = U ij (X, Y, Z) |
(5.16) |
где X, Y, Z –прямоугольные геоцентрических координат определяемой станции (пункта) |
|
Каждой из измеренных псевдодальностей Di соответствует поверхность положения типа: |
|
Ui = { (X - Xi)² + (Y- Yi)² + (Z - Zi)²}½ - (D*i - δD) =0 |
(5.17) |
Где δD – постоянная для всех измерений сеанса величина, обусловленная расхождением шкал времени СРНС и СНА.
Разложив в ряд Тейлора функцию (12) в окрестностях счислимой точки (X○, Y○, Z○) и ограничиваясь только линейными членами разложения получим следующее линейное уравнение:
- δD + a´i*δX +b´i *δY + c´i * δZ - (D*i- D°i) |
=0 |
(5.18) |
где a´i = (X - Xi)/ D°i; b´i = (Y - Yi) / D°i; |
c´i = (Z- Zi)/ D°i; |
|
D°i- значение псевдодальности, вычисленное по приближенным координатам(X○, |
Y○, Z○) |
|
Задача определения координат : X = X○+δX, Y= Y○+δY, Z= Z○+δZ, D*i= Di+ δD, имеет |
||
Решение только при i ≥ 4 , которое в общем случае может быть получено по |
методу |
|
наименьших квадратов (МНК). Таким образом, для решения задачи в прямоугольной пространственной системе координат необходимо иметь измерения псевдодальностей не менее чем