

2.4.2. Электропривод грузовых лебедок и кранов
Режим работы электропривода грузовых лебедок и кранов является повторно-кратковременным и характеризуется изменением нагрузки приводного двигателя в широких пределах вследствие изменения приемов и общей организации грузовых работ (подтаскивание груза, спаренная работа двух лебедок на один гак и т.п.).
Наиболее распространен привод грузовых лебедок с электрическим реверсированием двигателя и регулированием его скорости при подъеме и спуске груза с электрическим и механическим торможением. Судовые лебедки и подъемные механизмы кранов имеют следующие основные типы электроприводов:
а) с двигателями постоянного тока смешанного возбуждения при контроллерных или релейно-контакторных схемах управления;
б) по системе генератор-двигатель или с тиристорным управлением;
в) с асинхронными короткозамкнутыми многоскоростными двигателями;
г) асинхронными двигателями с фазным ротором.
В качестве примера рассмотрим схему электропривода грузовой лебедки, выполненной на базе асинхронного двигателя с фазным ротором с релейно-контакторным управлением (рис. 2.4).
Питание на привод подается автоматическим выключателем QF, который одновременно обеспечивает защиту от коротких замыканий. Для подключения к сети электродвигателя должен сработать один из контакторов КМ1 или КМ2. В роторную цепь электродвигателя включены пусковые резисторы R1 и R2, которые по мере разгона электродвигателя шунтируются силовыми контактами контакторов КМ3 и КМ4.
Выбор направления вращения осуществляется включением одного из контакторов КМ1 и КМ2 после нажатия кнопок SBВ или SBН соответственно. После этого двигатель разгоняется по искусственной механической характеристике, соответствующей включению в цепь ротора дополнительного сопротивления R1+R2 (рис. 2.5). Одновременно замыкается блок-контакт одного из контакторов КМ1 (КМ2) в цепи питания обмотки реле времени КТ1. Последнее запускает выдержку времени, по истечении которой замыкается контакт КТ1 в цепи обмотки контактора КМ3. Контактор срабатывает и замыкает свои силовые контакты в цепи ротора электродвигателя, шунтируются сопротивления R1, и двигатель переходит на вышерасположенную искусственную механическую характеристику. Кроме того, замыкается блок-контакт КМ3 в цепи обмотки реле времени КТ2. Последнее отсчитывает выдержку времени, по истечении которой замыкает свой контакт в цепи обмотки контактора КМ4. Контактор срабатывает и замыкает свои силовые контакты в цепи ротора электродвигателя, переводя его на естественную механическую характеристику, по которой двигатель разгоняется до точки, соответствующей номинальному режиму.
|
|
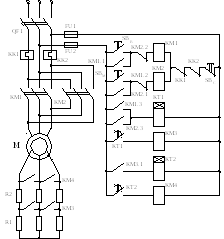
Рис. 2.4. Схема электропривода грузовой лебедки
|
|
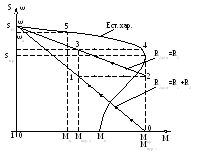
Рис. 2.5. Механические характеристики электропривода
Таким образом, разгон двигателя происходит по трем механическим характеристикам, последовательно проходя через точки 0–1–2–3–4–5.
Остановка электропривода производится нажатием кнопки стоп SBС.
2.5. Электроприводы вспомогательных механизмов энергетических установок и судовых систем
Судовыми системами принято называть совокупность вспомогательных механизмов: напорных средств, трубопроводов, арматуры и приводов управления, предназначенных для перемещения жидкостей и газов, поддержания заданного давления и температуры, необходимых для обеспечения всех нужд судна. Одни вспомогательные механизмы предназначены обслуживать энергетические установки, а другие – обеспечивать общие нужды судна. Вспомогательные механизмы энергетических установок обеспечивают охлаждение машин, смазку, подачу топлива и воздуха в машинное и котельное отделения. Общие нужды судна обеспечиваются системами для удаления и принятия водяного балласта, удаления трюмной воды, тушения пожара, снабжения пассажиров и команд питьевой и мытьевой водой, вентиляции судовых помещений и т. д.