

1.7. Интегрирование
Для решения определенного интеграла методом трапеций предусмотрена функция trapz.
Пример для вышеописанной функции func (см. рис.1.8), (где для обработки вектора аргументов поставлена точка перед знаком возведения в степень y=0.2*exp(x) -2*(x-1).^2; ) при пределах интегрирования [0 1] с шагом разбиения 0,1 приведен на рис.1.9.
Вполне очевидно, что с ростом числа точек разбиения по х (числа шагов, то есть при уменьшении шага по х) будет расти точность вычисления интеграла.
На рис.1.9 наглядно показано разбиение интервала интегрирования по х с заданным шагом, а также вектор значений функции в точках разбиения по х (то есть при данных значениях аргумента).
Получилось
значение интеграла равное -0,3261.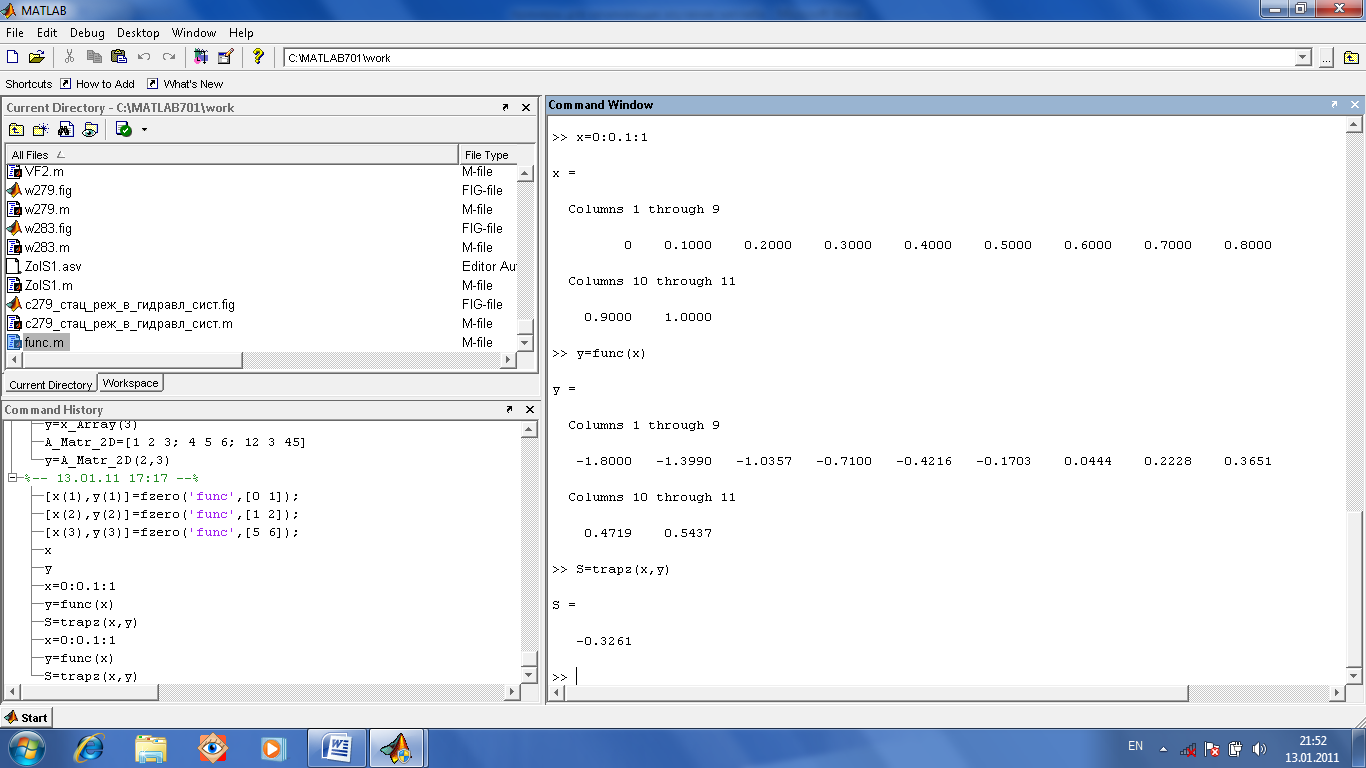
Рис. 1.9. Интегрирование
1.8. Решение обыкновенных дифференциальных уравнений и систем.
Дифференциальным уравнением n-го порядка называется уравнение:
H(t, x, x’, x’’, … , x(n))=0
Решением дифференциального уравнения называется функция x(t), которая обращает уравнение в тождество.
Системой дифференциальных уравнений n-го порядка называется система вида:
x1’=f1(t,
x1,
x2,
x3,
… , xn)
x2’=f1(t, x1, x2, x3, … , xn)
…………………………..
xn’=f1(t, x1, x2, x3, … , xn)
Системой линейных дифференциальных уравнений называют систему вида:
x1’= xj
+ b1
xj
+ b1
x2’= xj
+ b1
xj
+ b1
.…………………..
xn’= xj
+ b1
xj
+ b1
Решением системы является вектор x(t)=x1(t), x2(t), … ,xn(t), который обращает вышеприведенные системы уравнений в тождества.
Различают:
Задачу Коши, когда все дополнительные условия заданы в одной (чаще всего в начальной) точке интервала значений t.
Краевую задачу, когда дополнительные условия заданы на границах интервала значений t.
Есть много встроенных функций, обеспечивающих решение вышеуказанных задач.
Ниже описаны некоторые из них с примерами их использования.
Входными параметрами этих функций являются:
f вектор-функция для вычисления правой части уравнения вида x’=f(x,t), удовлетворяющей начальному условию x(t0)=x0 или системы дифференциальных уравнений, данных в матричном виде dx/dt=f(t,x) с начальным условием x(t0)=x0 данным в матричном виде.
interval массив из двух чисел, определяющий интервал интегрирования дифференциального уравнения или системы.
X0 вектор начальных условий системы дифференциальных уравнений.
options параметры управления ходом решения дифференциального уравнения или системы уравнений.
Все функции возвращают:
Массив Т содержащий координаты узлов сетки, в которых ищется решение.
Матрицу Х в которой i-й столбец является значением вектор-функции решения в узле Ti.
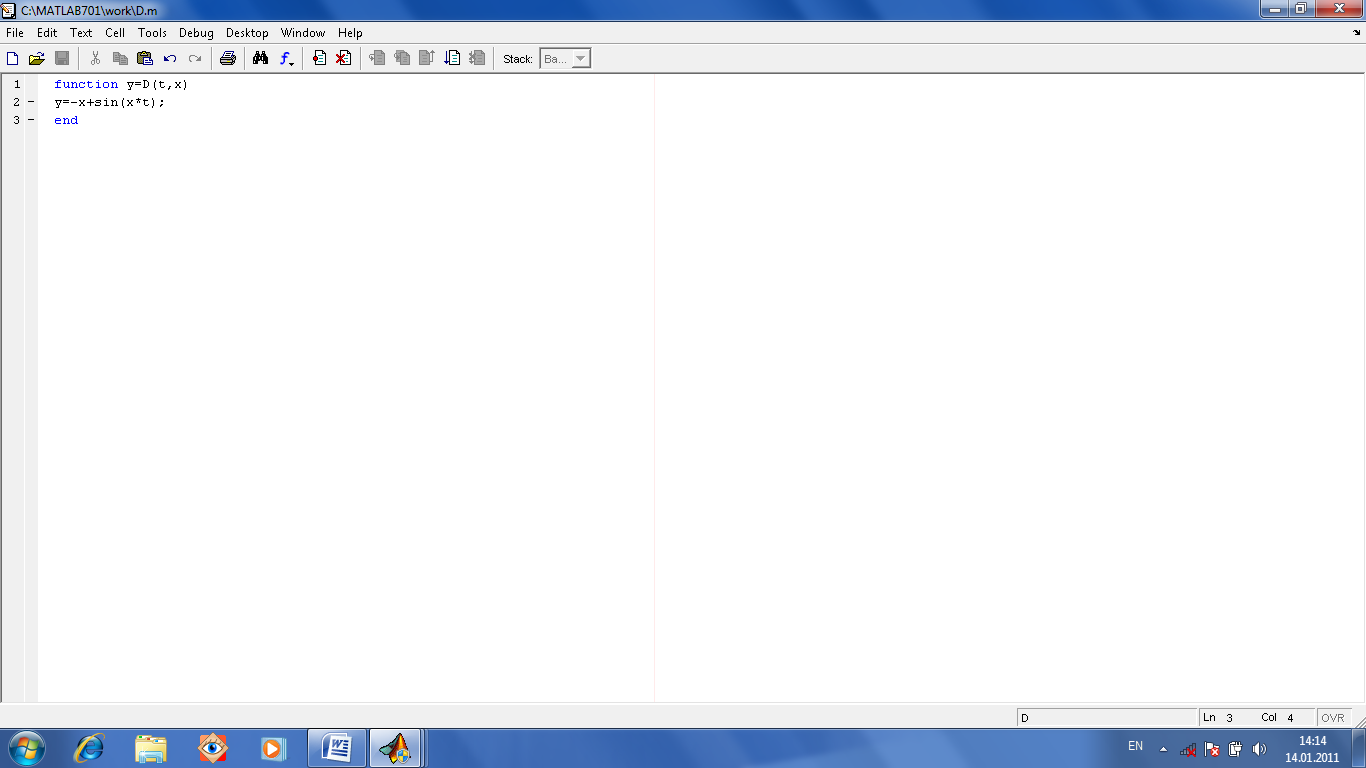
Решим задачу Коши: Рис. 1.10. функция D(t,x)
dx/dt + x =sin xt при x(0)=1.5. Напишем М-функцию (рис. 1.10)
Используем функцию ode113, которая реализует метод Адамса. В качестве ее параметров используются: @D ссылка на М-функцию, [0 35] интервал интегрирования уравнения, начальное условие x(0)=1.5 указано в виде 1,5 на соответствующем месте в списке параметров.
Обращение к функции: ode113(@D, [0 35], 1.5). Она строит график решения (см.рис.1.11).

Рис. 1.11. функция ode113 строит график решения
Напишем
М-функцию syst
(см. рис.1.12)
Используем функцию ode23 решающую методом Рунге-Кутта 2-3 порядка. Ее вызов
[T, Y]=ode23(@syst, [0 10], [0 0]); Рис. 1.12. функция syst(t,y)
где явно указаны выходные параметры вектор Т и матрица Y, а также указаны интервал [0 10] и начальные значения [0 0].
Затем
формируем график решения plot(T,Y,’k-‘).
Получаем график (см.рис.1.13)
Рис. 1.13. график решения