

§4. Рабочий режим (рр) асинхронного двигателя.
Уравнения, описывающие РР
В РР в фазах обмотки
статора протекают токи I1,
образующие ВМП. Большая часть этого
поля (поток) сцепляется как с обмоткой
статора, так и с обмоткой ротора и
называется основным потоком обмотки
статора – Ф1.
Меньшая часть обмотки поля статора
сцепляется только с витками обмотки
статора и образует поток рассеивания
![]() статора. Токи ротора
статора. Токи ротора![]() создают свое магнитное поле, часть
которого сцепляется с обеими обмотками
и образует основной поток ротора – Ф2.
Поток рассеивания
создают свое магнитное поле, часть
которого сцепляется с обеими обмотками
и образует основной поток ротора – Ф2.
Поток рассеивания
![]() обмотки ротора сцепляется только с
витками этой обмотки.
обмотки ротора сцепляется только с
витками этой обмотки.
Как и в Т. поток
![]() направлен встречно потоку
направлен встречно потоку![]() ,
т.е. оказывает на него размагничивающее
воздействие. При этом потоки
,
т.е. оказывает на него размагничивающее
воздействие. При этом потоки![]() и
и![]() вращаются в пространстве (относительно
неподвижного статора) с одинаковой
частотой
вращаются в пространстве (относительно
неподвижного статора) с одинаковой
частотой![]() ,
а значит, неподвижны относительно друг
друга. Действительно, ток ротора,
изменяющийся с частотой
,
а значит, неподвижны относительно друг
друга. Действительно, ток ротора,
изменяющийся с частотой![]() ,
создает поток
,
создает поток![]() ,
который вращается относительно ротора
с частотой
,
который вращается относительно ротора
с частотой![]() в ту же сторону, что и сам ротор, т.е.
в ту же сторону, что и сам ротор, т.е.
![]() .
.
Тогда частота
вращений потока ротора
![]() относительно статора равна сумме частот
вращения ротора
относительно статора равна сумме частот
вращения ротора![]() и поля ротора
и поля ротора![]() относительно ротора, т.е.
относительно ротора, т.е.
![]()
Т.о., независимо
от частоты
![]() вращения ротора, его поле (поток
вращения ротора, его поле (поток![]() )
всегда вращается синхронно с полем
статора (поток
)
всегда вращается синхронно с полем
статора (поток![]() ).
Складываясь, эти потоки образуют основной
магнитный поток
).
Складываясь, эти потоки образуют основной
магнитный поток![]() двигателя, который, как и в Т., при
изменении нагрузки двигателя от 0 до
номинальной практически остается
неизменным и примерно равным потоку
двигателя, который, как и в Т., при
изменении нагрузки двигателя от 0 до
номинальной практически остается
неизменным и примерно равным потоку![]() х.х. асинхронного двигателя, т.е. снова
приходим к уравнению магнитного состояния
х.х. асинхронного двигателя, т.е. снова
приходим к уравнению магнитного состояния
![]() .
(1)
.
(1)
Основной поток, вращаясь в пространстве, наводит в обмотках статора и ротора переменные ЭДС, действующие значения которых определяются:
![]() ,
,
![]() ,
(2)
,
(2)
где
![]() –
ЭДС фазы вращения ротора. На его вращение
указывает значокS
в обозначении индекса.
–
ЭДС фазы вращения ротора. На его вращение
указывает значокS
в обозначении индекса.
Эта эдс так же как и ее частота , зависит от скольженияS ротора. В этом можно убедиться подставив во второе из выражений (2) выражение частоты: . Тогда
![]() ,
(3)
,
(3)
где
![]() –
ЭДС неподвижного ротора (см. §4)
–
ЭДС неподвижного ротора (см. §4)
Потоки
![]() и
и![]() наводят ЭДС рассеивания
наводят ЭДС рассеивания![]() и
и![]() ,
которые противоположны соответствующим
токам
,
которые противоположны соответствующим
токам![]() и
и![]() ,
т.е.
,
т.е.
![]() ,
,![]() ,
(4)где
,
(4)где![]() ,
,![]() –
индуктивное сопротивление рассеивания
обмотки статора и вращающегося ротора;
–
индуктивное сопротивление рассеивания
обмотки статора и вращающегося ротора;
![]() ,
,
![]() –
индуктивности рассеивания обмоток.
–
индуктивности рассеивания обмоток.
Т.к. частота
![]() ,
то
,
то
![]() ,
(5)
,
(5)
где
![]() –
индуктивное сопротивление неподвижного
ротора
–
индуктивное сопротивление неподвижного
ротора
Уравнение электрического состояния фазы обмотки статора по аналогии с Т.
![]()
Для фазы обмотки
короткозамкнутого ротора (![]() ),
будем иметь уравнение:
),
будем иметь уравнение:
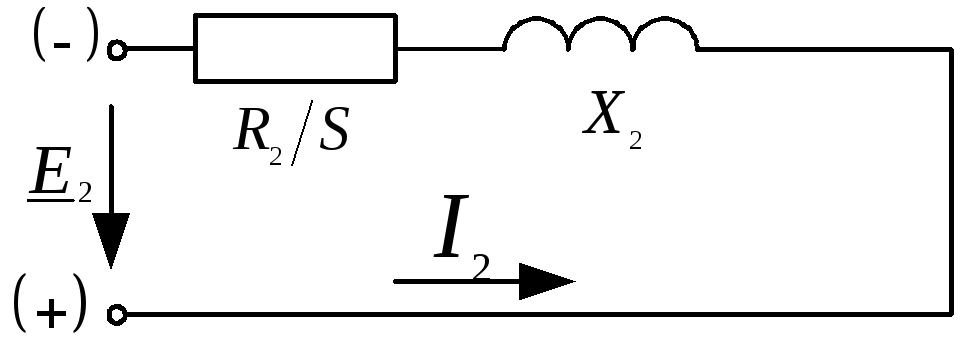
![]() или поделив на
или поделив на
![]() ,
получим
,
получим
![]() ,
,
![]() .
(6)
.
(6)
Уравнению (6) соответствует схема замещения фазы цепи обмотки ротора (рис. 1).
Из уравнения (1) следует уравнение равенства МДС двигателя
![]() ,
(7)
,
(7)
из которого может быть получено уравнение токов двигателя:
![]() ,
(8)
,
(8)
где![]() – приведенное значение тока ротора;
– приведенное значение тока ротора;
![]() –коэффициент
трансформации тока.
–коэффициент
трансформации тока.
Из (8) следует то,
что ток статора
![]() содержит две составляющие: составляющую
содержит две составляющие: составляющую![]() = току х.х. и независимую от нагрузки
двигателя, т.е.
= току х.х. и независимую от нагрузки
двигателя, т.е.![]() при
при![]() ;
;![]() – составляющая, равная компенсационному
току
– составляющая, равная компенсационному
току![]() ,
который выполняет ту же роль, что и в Т.
и определяется нагрузкой на валу
двигателя. Таким образом, любое изменение
механической нагрузки двигателя
сопровождается соответствующим
изменением тока ротора
,
который выполняет ту же роль, что и в Т.
и определяется нагрузкой на валу
двигателя. Таким образом, любое изменение
механической нагрузки двигателя
сопровождается соответствующим
изменением тока ротора![]() ,
а, следовательно, и тока статора
,
а, следовательно, и тока статора![]() за счет его составляющей
за счет его составляющей![]() .
Такое влияние механической нагрузки
на ток
.
Такое влияние механической нагрузки
на ток![]() объясняется тем, что изменение нагрузки
вызывает изменение скольженияS.
Это в свою очередь согласно (3) влияет
на ЭДС ротора, а значит и на его ток,
выражение для которого получим из (6)
объясняется тем, что изменение нагрузки
вызывает изменение скольженияS.
Это в свою очередь согласно (3) влияет
на ЭДС ротора, а значит и на его ток,
выражение для которого получим из (6)
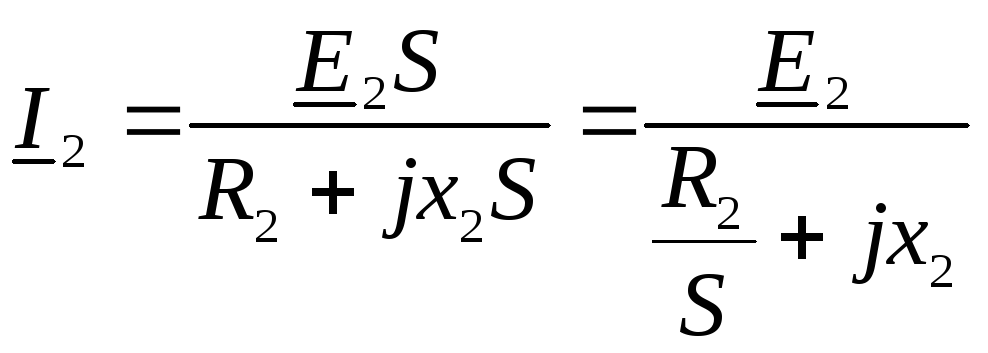 или
или
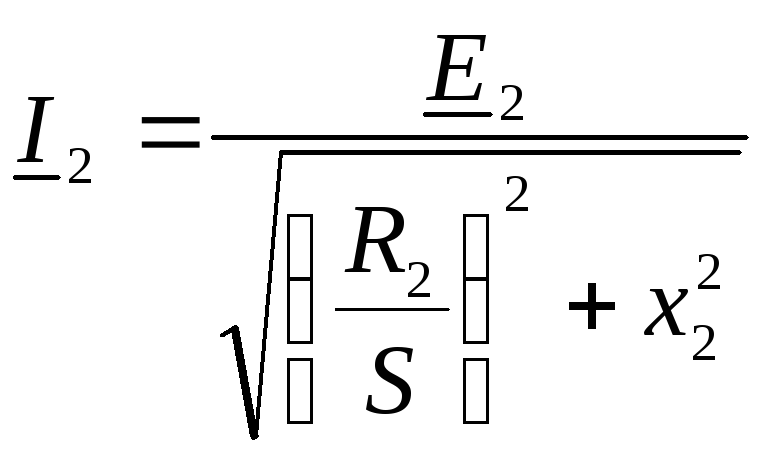 .
(9)
.
(9)
Например, в режиме
х.х. скольжение
![]() ;
поэтому ток ротора
;
поэтому ток ротора![]() ,
а ток статора
,
а ток статора![]() .
В начальный момент ЭДС в нем достигает
наибольшее значение
.
В начальный момент ЭДС в нем достигает
наибольшее значение![]() и поэтому ток ротора
и поэтому ток ротора![]()
![]() ,
,
что приводит к значительному увеличению тока статора.
![]() .
.
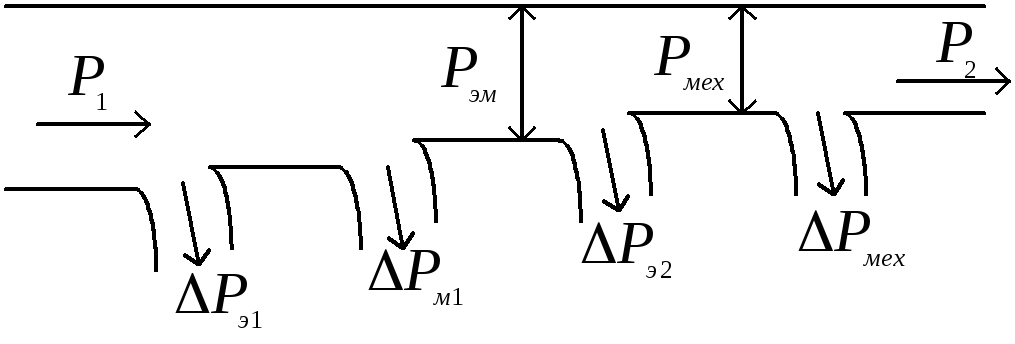
2. Энергетические процессы в двигателе
Преобразование активной мощности в двигателе связано с потерями. Эти потери делятся на электрические, магнитные и механические. На рис. Показана энергетическая диаграмма двигателя.
Активная мощность потребляется из сети:
![]() ,
,
![]() –коэффициент
мощности двигателя.
–коэффициент
мощности двигателя.
Часть этой мощности теряется на нагрев обмотки статора:
![]()
Другая часть мощности расходуется на магнитные потери в середине статора:
![]()
Оставшаяся мощность с помощью основного магнитного потока передается из статора в ротор и представляет собой электромагнитную мощность:
![]() или
с учетом схемы замещения
или
с учетом схемы замещения
![]() ,
(10)
,
(10)
где
![]() –
приведенное активное сопротивление
ротора.
–
приведенное активное сопротивление
ротора.
При этом будем считать, что при любых напряжениях независимо от скольжения активное сопротивление ротора неизменно.
Часть электромагнитной мощности расходуется на нагрев обмотки ротора:
![]() или
с учетом (10)
или
с учетом (10)
![]() ,
(11)
,
(11)
т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа двигателя более экономна при малых скольжениях.
Магнитные
потери в сердечнике ротора малы из-за
небольшой частоты тока ротора. (![]() ),
поэтому их не учитывают.
),
поэтому их не учитывают.
Полная механическая мощность
![]() ,
(12)
,
(12)
Мощность
![]() ,
называемая полезной или выходной меньше
мощности
,
называемая полезной или выходной меньше
мощности![]() на значение механических потерь
на значение механических потерь![]() в роторе, вызванных трением его вала в
подшипниках и сопротивлением воздуха:
в роторе, вызванных трением его вала в
подшипниках и сопротивлением воздуха:
![]() ,
,
![]() ,
(13)
,
(13)
поэтому уравнение баланса активной мощности имеет вид:
![]() ,
,
![]() .
.
На основе Т-образной схемы замещения можно рассмотреть баланс реактивной мощности двигателя. Двигатель потребляет реактивную мощность:
![]() .
.
Часть этой мощности расходуется на создание поля рассеяния обмотки статора.
Реактивная мощность намагничивания:
![]() расходуется
на создание основного магнитного потока
и при
расходуется
на создание основного магнитного потока
и при
![]() является неизменной.
является неизменной.
Реактивная мощность рассеяния обмотки ротора
![]() .
.
Таким образом, баланс реактивной мощности определяется уравнением
![]()
Основную
часть реактивной мощности
![]() составляет мощность
составляет мощность![]() ,
которая из-за наличия воздушного зазора
и большого тока намагничивания
,
которая из-за наличия воздушного зазора
и большого тока намагничивания![]() значительно больше, чем в тр-р (увеличивается
магнитное сопротивление на пути основного
магнитного потока). Большие значения
значительно больше, чем в тр-р (увеличивается
магнитное сопротивление на пути основного
магнитного потока). Большие значения![]() и
и![]() существенно влияют на коэффициент
мощности и снижают его значение.
существенно влияют на коэффициент
мощности и снижают его значение.
При
снижении нагрузки
![]() значительно уменьшается и при х.х.
составляет
значительно уменьшается и при х.х.
составляет![]()
3. Электромагнитные моменты двигателя
Уравнение (13) может быть записано в виде:
![]()
Поделив
его правую и левую части на угловую
скорость вращения ротора Ω![]() получим соответствующее уравнение
моментов.
получим соответствующее уравнение
моментов.
![]() ,
,
где
![]() – электромагнитный момент двигателя;
– электромагнитный момент двигателя;
![]() –составляющая
электромагнитного момента, уравновешивающая
внешний тормозящий момент
–составляющая
электромагнитного момента, уравновешивающая
внешний тормозящий момент
![]() ,
создаваемый рабочим механизмом, т.е.
,
создаваемый рабочим механизмом, т.е.![]() .
Соответственно
.
Соответственно![]() называется вращающим моментом.
называется вращающим моментом.
![]() –составляющая
электромагнитного момента, уравновешивающая
внутренний тормозной момент
–составляющая
электромагнитного момента, уравновешивающая
внутренний тормозной момент
![]() ,
создаваемый силами сопротивления
воздуха, а также силами трения вала
ротора в подшипниках, т.е.
,
создаваемый силами сопротивления
воздуха, а также силами трения вала
ротора в подшипниках, т.е.![]()
Так
как момент
![]() почти не зависит от механической
нагрузки, то
почти не зависит от механической
нагрузки, то![]() часто называют моментом х.х.
часто называют моментом х.х.
В
установившемся режиме работы, когда
![]() ,
справедливо равенство моментов
,
справедливо равенство моментов
![]() ,
,
![]() ,
,
где
![]() –
момент статического сопротивления.
–
момент статического сопротивления.
Электромагнитный
момент создается в результате
взаимодействия тока ротора
![]() с вращающимся магнитным полем и с учетом
(12) может быть определен по формуле:
с вращающимся магнитным полем и с учетом
(12) может быть определен по формуле:
![]() ,
а
,
а
![]() ,
,
где
![]() –
число пар полюсов.
–
число пар полюсов.
![]() ,
(14)
,
(14)
Электромагнитная мощность, согласно схеме замещения
![]() (15)
(15)
Подставляя (15) в (14) после преобразования получим
![]() (16)
(16)
где
![]() –
постоянный коэффициент, зависящий от
конструкции двигателя.
–
постоянный коэффициент, зависящий от
конструкции двигателя.
![]() –угол
сдвига фаз между ЭДС и током ротора. Он
может быть найден из треугольника
сопротивлений, построенного для схемы
замещения цепи ротора.
–угол
сдвига фаз между ЭДС и током ротора. Он
может быть найден из треугольника
сопротивлений, построенного для схемы
замещения цепи ротора.
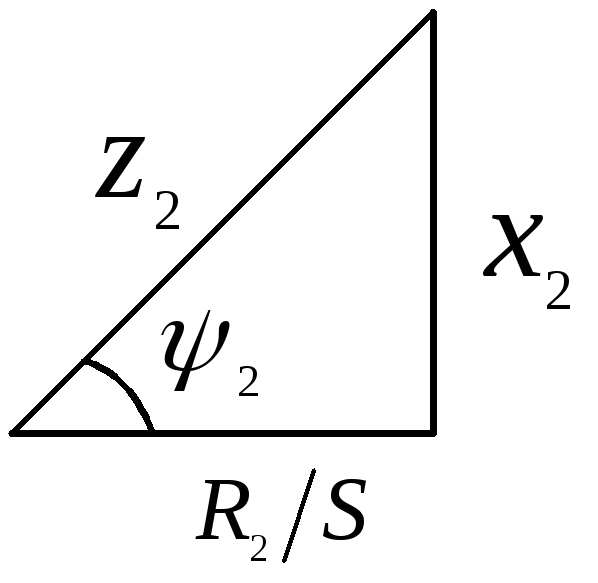
При
этом
![]() ,
т.е. этот угол также зависит от скольжения.
,
т.е. этот угол также зависит от скольжения.
Произведение
![]() в уравнении (16) есть активная составляющая
тока ротора, совпадающая по фазе с ЭДС
ротора.
в уравнении (16) есть активная составляющая
тока ротора, совпадающая по фазе с ЭДС
ротора.
Таким образом, электромагнитный момент двигателя пропорционален магнитному потоку и активной составляющей тока ротора (а не самому току ротора).
На рисунке показана векторная диаграмма ЭДС и токов асинхронного двигателя.
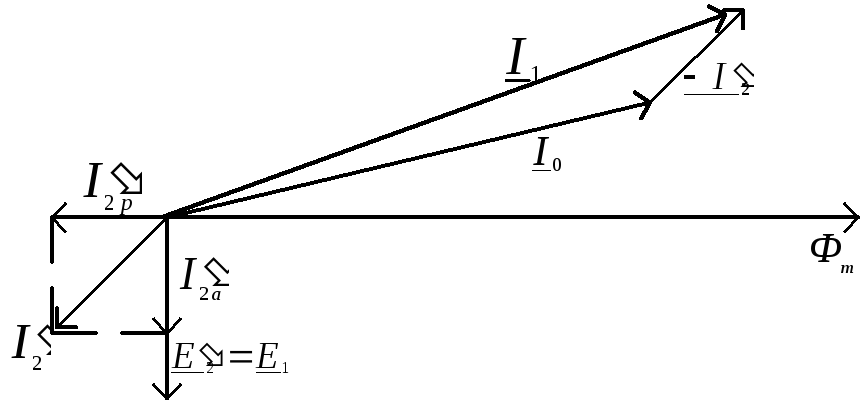 Рис.
4.
Рис.
4.
Для практических расчетов, помимо формулы (16) используется другая формула электромагнитного момента:
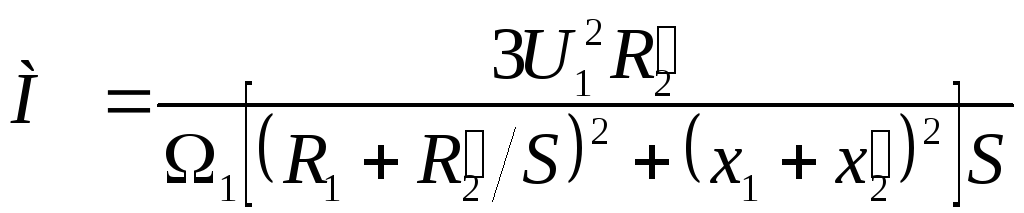 (19)
(19)
Из
(19) следует, что значение электромагнитного
момента пропорционально квадрату
![]() напряжению сети, т.е. АД чувствителен к
изменению этого напряжения. Например:
при снижении
напряжению сети, т.е. АД чувствителен к
изменению этого напряжения. Например:
при снижении![]() на 10% электромагнитный момент уменьшается
на 19% (
на 10% электромагнитный момент уменьшается
на 19% (![]() )
и может оказаться недостаточным для
приведения в движение рабочего механизма.
)
и может оказаться недостаточным для
приведения в движение рабочего механизма.