

4.2. Бинарная задача проверки простых гипотез
Наиболее просто задача построения оптимального приемника решается для случая амплитудной телеграфии с пассивной паузой, что соответствует принятию решения о том, что передавался символ 0 (сигнала нет) или символ 1 (сигнал есть).
Предполагается, что помеха в канале представляет собой гауссовский шум с нулевым средним и известной дисперсией, который взаимодействует с сигналом аддитивно (суммируется). Результатом обработки наблюдаемого колебания является случайная величина y, которая может иметь различное распределение в зависимости от того, есть ли сигнал в наблюдаемом колебании, а именно: распределение при гипотезе H0 – «сигнала нет» –
является гауссовским с нулевым средним, а распределение при гипотезе H1
– «сигнал есть» – отличается сдвигом на величину a, зависящую от способа обработки (например, если обработка сводится к взятию отсчета в момент, когда несущее колебание достигает максимума, величина a представляет собой его амплитуду). Значение a предполагается известным.
Таким образом, проверяемые гипотезы описываются двумя условными плотностями распределения вероятностей w(y/H0) и w(y/H1),
изображенными на рис. 4.2.

Приемник в таком случае должен сравнить y с некоторым фиксированным значением (порогом) yп и если y больше порога, принять
решение о наличии сигнала, в противном случае – о его отсутствии, что можно кратко записать в следующей символической форме:
y ≥ yп → «1»; y ≤ yп → «0».
Рис. 4.2. Условные плотности распределения вероятностей величины y при простых гипотезах
Каким бы ни был порог yп, очевидно, есть некоторая ненулевая вероятность p01 принять решение о наличии сигнала при его фактическом отсутствии. Эта вероятность называется условной вероятностью ошибки

Аналогично, существует ненулевая вероятность принять решение об отсутствии сигнала, в то время как на самом деле он есть (условная вероятность ошибки второго рода, или пропуска сигнала):
Анализ рис. 4.2 показывает, что сумма указанных условных вероятностей минимальна, если порог yп находится как абсцисса точки
пересечения условных плотностей w(y/H0) и w(y/H1).
Очевидно, при таком выборе порога приемник является оптимальным по критерию минимума суммарной условной вероятности ошибки (4.4)
ипринятие решения основывается на сравнении значений функций w(y/H0)
иw(y/H1) при наблюдаемом значении y:

Это правило принятия решения можно переписать также в форме:
(4.5)
Решение, таким образом, принимается в пользу той гипотезы, которая представляется более правдоподобной при данном значении y, поэтому отношение называется отношением правдоподобия и обозначается
Λ(y). Правило (4.5) называют правилом максимального правдоподобия. Заметим, что критерий (4.4) часто называют критерием максимума правдоподобия.
Критерий идеального наблюдателя предполагает учет априорных вероятностей гипотез, и оптимальный в смысле этого критерия приемник обеспечивает минимум средней вероятности ошибки, т.е. наименьшую сумму безусловных вероятностей ошибок первого и второго рода. Иначе говоря, сравнению подлежат функции w(y/H0) и w(y/H1), умноженные на
соответствующие априорные вероятности. Правило принятия решения в таком приемнике 

Используя понятие отношения правдоподобия, можно записать правило в виде:
при этом отношение правдоподобия сравнивается с пороговым значением, зависящим от априорных вероятностей.
Наконец, в случае байесовского критерия решение принимается по правилу:
или
Итак, во всех случаях оптимальный приемник (демодулятор, или решающее устройство) «устроен одинаково»: для наблюдаемого значения y, зависящего от принятой реализации z(t), вычисляется значение отношения правдоподобия, которое сравнивается с порогом; порог равен для
оптимального приемника по критерию минимума среднего риска, p0/p1 для
идеального приемника Котельникова и 1 для приемника максимального правдоподобия.

4.3. Приём полностью известного сигнала (когерентный приём)
Рассмотрим принятие решения в системе связи при следующих условиях: синхронизация является точной и форма сигнала на интервале наблюдения точно известна, неизвестен лишь сам факт наличия либо отсутствия сигнала в наблюдаемом колебании. (Эта ситуация наиболее близка к реальности в кабельных линиях связи, где условия распространения сигналов известны и практически неизменны.)
Будем считать, что на интервале наблюдения независимо от сигнала присутствует гауссовский шум с нулевым средним и спектральной плотностью мощности N0/2, постоянной в некоторой полосе частот
-F < f < F («квазибелый» шум).
Полагая, что длительность интервала наблюдения равна T, возьмем n отсчетов наблюдаемого колебания с шагом t = 1/2F = T / n, при этом отсчеты шума являются некоррелированными вследствие того, что корреляционная функция квазибелого шума (вида "sin x / x") пересекает ось абсцисс при значениях времени, кратных t. Поэтому совместная плотность распределения вероятностей взятых отсчетов (выборочных значений) в отсутствие сигнала равна:
где σ2 = N0 / F = N0 / 2Δt.
Если сигнал присутствует и принимает в моменты взятия отсчетов значения sk = s(tk), то совместная плотность распределения вероятностей выборочных значений
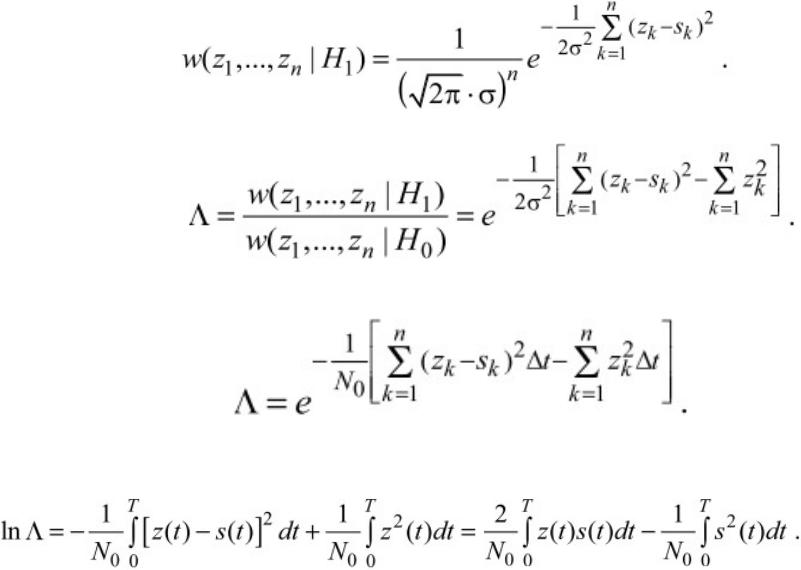
Отношение правдоподобия
Подставляя в это выражение 2σ2 = N0 / t, получим
(4.6)
Устремляя t к нулю (n→∞), запишем логарифм отношения правдоподобия:

Поскольку логарифм является монотонной функцией, правило обнаружения сигнала известной формы на фоне гауссовского квазибелого шума, оптимальное в смысле критерия максимума правдоподобия, основано на сравнении с нулевым порогом величины
(4.8)
где |
– энергия сигнала. |
Первое слагаемое в выражении (4.8) называется корреляционным интегралом, так как совпадает по форме с выражением взаимно корреляционной функции сигнала и наблюдаемого процесса при нулевом сдвиге. Энергия сигнала известна, и при обнаружении можно сравнивать значение корреляционного интеграла (случайное в силу случайности реализации z(t)) с порогом, равным E/2.
Правило различения M сигналов известной формы на фоне гауссовского квазибелого шума, оптимальное в смысле критерия максимума правдоподобия, основано на сравнении между собой величин
 , i = 1,…M.
, i = 1,…M.
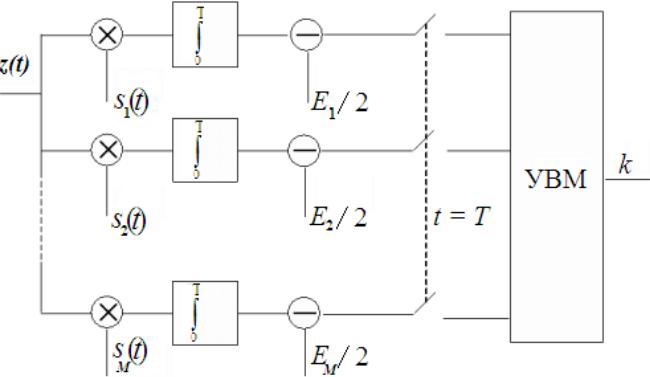
Решение принимается в пользу того сигнала, для которого эта величина максимальна.
Структура оптимального приемника для различения M сигналов показана на рис. 4.3.
Рис. 4.3. Структура приемника максимального правдоподобия
Устройство выбора максимума УВМ выдает на выход номер k канала, в котором величина (4.8) максимальна.
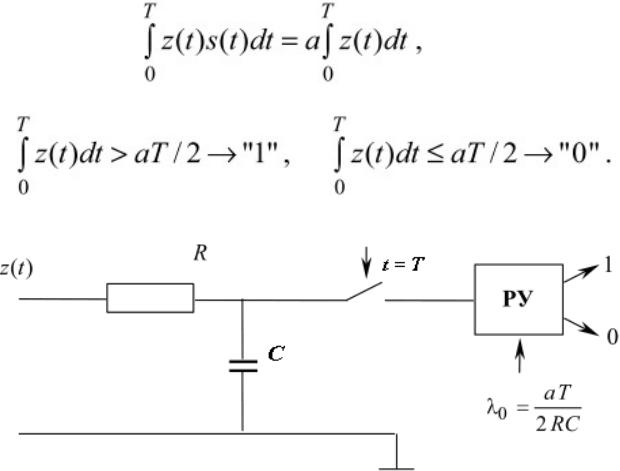
Пример 4.2. В проводных системах связи с амплитудной телеграфией могут применяться посылки в форме прямоугольного видеоимпульса. Предположим, что сигнал, соответствующий символу «1», представляет собой прямоугольный видеоимпульс с амплитудой a и длительностью T.
Тогда корреляционный интеграл имеет вид
порог равен Е/2 = а2Т/2, тогда решающее правило имеет вид
Структурная схема приемника показана на рис. 4.4.
Рис. 4.4. Структурная схема приемника прямоугольного видеоимпульса