

РОЗДІЛ 3. БІОМЕХАНІКА, БІОРЕОЛОГІЯ ТА ГЕМОДИ- НАМІКА
“Механічний рух у тілі тварини підпорядковуєть- ся тим самим законам, що і рух тіл неживих, і тому очевидно, що питання про те , яким саме чином і у якій мірі рух крові по судинах залежить від м’язових та пружних сил серця і судин, зводиться до проблем, які належать до вузько спеціальних розді- лів гідравліки”.
Томас Юнг
Біологічні тканини складні за своєю будовою, неоднорідні за своїм складом, їх структура і властивості визначаються тими функціями, які вони виконують в живих організмах. В морфології виділяють декілька типів тканин – епітеліальну, тканини внутрішнього середовища (кров і лімфу), сполучну, м’язову, нер- вову. Всі вони, як правило, мають клітинну будову, складну струк- туру, і всім цим тканинам притаманний механічний рух у тій чи іншій мірі, починаючи з внутрішньоклітинних мікрорухів скоро- чувальних білкових ниток до макрорухів окремих органів та сис- тем. Деякі з тканин призначені для виконання опорно-рухової функції і в процесі життєдіяльності підлягають значним ме- ханічним навантаженням. Різні форми механічного руху в живих системах вивчає біомеханіка, основи якої як науки про закони ме- ханічних рухів у біологічних системах започатковані за часів Арістотеля, Леонардо да Вінчі, Бореллі, Галілея, Декарта, Гука, Ейлера, Бернуллі, Юнга, Гельмгольця, Пуазейля та ін. (Зауважимо, що останні четверо були професорами медицини).

При вивченні деяких механічних властивостей біологічних тка-
нин зручно уявляти їх у вигляді суцільних середовищ, не розглядаю- чи їх мікроструктуру і абстрагуючись від їх клітинної будови. Сере- довище може розглядатися як суцільне, якщо відстані, на яких змінюються його усереднені властивості (наприклад, густина, в’язкість тощо), значно перевищують розміри частинок (у нашому випадку – клітин, формених елементів), з яких складається середо- вище. У цьому випадку реальну тканину можна поділити на ряд еле- ментарних об’ємів, розміри яких значно перевищують розміри клітини, і до кожного з них застосовувати закони механіки з метою описання різних механічних явищ, таких як плин чи деформація се- редовища.
Розділ механіки, що вивчає плин і деформацію суцільних сере- довищ, зветься реологією. Вивчення цих рухів у біологічних систе- мах становить задачу біореології. Розглянемо деякі важливі поняття
реології. |
|
|
|
Виділимо у суцільному середовищі елементарний об’єм |
|||
V з |
|||
|
|
||
масою |
m. Сили F, що діють у суцільному середовищі, можна |
||
віднести до одиниці маси (об’єму) чи одиниці площі поверхні. |
|
||
Позначимо силу, що діє на одиницю маси речовини, |
через |
||
f F m; аналогічним способом визначається і величина сили, що
m; аналогічним способом визначається і величина сили, що
діє на одиницю об’єму f = F/ΔV – так звана об’ємна сила. Наприк- лад, об’ємні сили інерції і тяжіння відповідно дорівнюють f =
Δma/ΔV = ρa; f = Δmg/ΔV = ρg.
З цих виразів випливає, що величини об’ємних сил не залежать від розмірів і мас тіл, а визначаються лише усередненими властиво- стями тіл (густиною ) і характеристиками їх механічного руху (прискоренням a). Вони діють одночасно на всі елементарні об’єми речовини, їх зручно використовувати для опису плину і деформації реальних суцільних середовищ. Так, наприклад, використання цих сил дозволяє в зручній формі записати рівняння руху різних рідин, в тому числі і крові. (Слід підкреслити, що описуючи рух суцільних середовищ, використовують не лише об’ємні сили, а й об’ємну гус- тину енергії w = W/ V, яка характеризує величину енергії, що при- падає на одиницю об’єму).

Різні ділянки середовища можуть взаємодіяти між собою
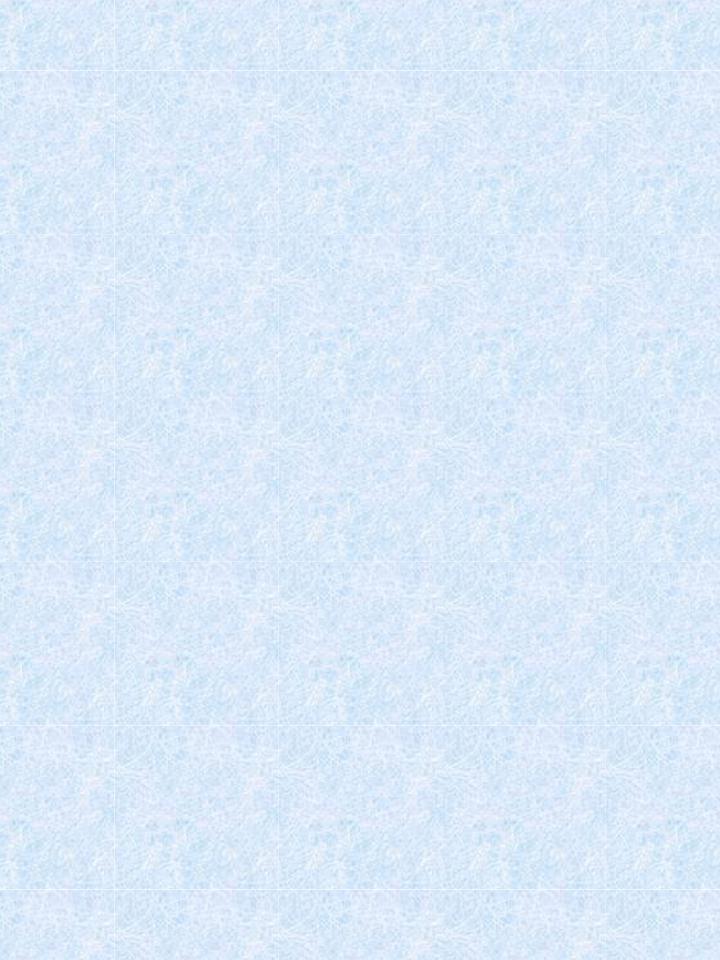
по поверхнях розділу, в цьому випадку зручно користуватися поверхневими силами, тобто силами, що діють на одиницю площі поверхні. Нехай дві ділянки тіла I і II межують між со- бою поверхнею АВ (мал. 3.1).
Мал. 3.1. Сили, які діють на поверхні розділу середовищ.
Виділимо на поверхні АВ малу площу dS, на яку під деяким
кутом до нормалі діє сила dF (мал. 3.1а). У цьому випадку харак- теристикою поверхневих сил є величина напруження σ, яка
дорівнює силі, що діє на одиницю площі: σ = dF/dS [Н/м2]. Зручно ввести дві складові σ по відношенню до вектора n но р- малі до елемента поверхні dS: нормальну складову σn, що діє
перпендикулярно до площини, і тангенціальну στ, спрямовану по дотичній до поверхні dS (мал. 3.1б). Саме перша складова містить в собі скалярну величину – тиск Р, що дорівнює відношенню ве- личини сили до величини площі поверхні: P = F/S.
Іншим прикладом дії поверхневих сил є явище поверхневого натягу, яке характеризується коефіцієнтом поверхневого натягу. Цей коефіцієнт чисельно дорівнює силі dF, яка діє на одиницю довжини довільного контура dL на поверхні і спрямована по до-
тичній до поверхні (мал 3.1в): = = dF /dL [Н/м].
Поверхневі сили використовують для опису явищ дефор-
мації, плину в’язких середовищ, пластичності, повзучості, по- верхневого натягу тощо, які спостерігаються при функціонуванні біологічних тканин.
3.1. МЕХАНІЧНІ ВЛАСТИВОСТІ БІОЛОГІЧНИХ ТКАНИН
Розглянемо найважливіші механічні властивості біологіч- них тканин, завдяки яким здійснюються різноманітні ме- ханічні явища – такі як функціонування опорно-рухового апа- рата, процеси деформацій тканин і клітин, розповсюдження хвиль пружної деформації, скорочення і розслаблення м’язів, рух рідких і газоподібних біологічних середовищ. Серед цих властивостей виділяють:
-пружність – здатність тіл відновлювати розміри (фор- му чи об’єм) після зняття навантажень;
-жорсткість – здатність матеріалу протидіяти зов ніш- нім навантаженням;
-еластичність – здатність матеріалу змінювати розміри під дією зовнішніх навантажень;
-міцність – здатність тіл протидіяти руйнуванню під дією зовнішніх сил;
-пластичність – здатність тіл зберігати (повністю або частково) зміну розмірів після зняття навантажень;
-крихкість – здатність матеріалу руйнуватися без утво- рення помітних залишкових деформацій;
-в’язкість – динамічна властивість, яка характеризує здатність тіла протидіяти зміні його форми при дії тан- генціальних напружень;
-плинність – динамічна властивість середовища, яка ха- рактеризує здатність окремих його шарів пе- реміщуватись з деякою швидкістю у просторі відносно інших шарів цього середовища.

3 . 1 . 1 . П р у ж н і в л а с т и в о с т і т і л . Д е ф о р м а ц і ї
У с і р е а л ь н і т і л а з д а т н і д е ф о р м у в а т и с ь . З м і н у ф о р м и ч и о б ’ є м у т і л а п і д д і є ю з о в н і ш н і х с и л н а з и в а ю т ь д е ф о р - м а ц і є ю . Р о з р і з н я ю т ь п р у ж н і т а п л а с т и ч н і д е ф о р м а ц і ї . П р у ж н и м и н а з и в а ю т ь д е ф о р м а ц і ї , я к і п о в н і с т ю з н и к а ю т ь п і с л я п р и п и н е н н я д і ї з о в н і ш н і х с и л . В і д н о в л е н н я п е р в и н - н о ї ф о р м и т і л а в і д б у в а є т ь с я п і д д і є ю в н у т р і ш н і х с и л – с и л п р у ж н о с т і , щ о в и н и к а ю т ь у т і л і п р и д е ф о р м а ц і ї . П р и п л а - с т и ч н и х д е ф о р м а ц і я х т і л о з а л и ш а є т ь с я у д е ф о р м о в а н о м у с т а н і п і с л я п р и п и н е н н я д і ї з о в н і ш н і х с и л .
К і л ь к і с н о ю м і р о ю д е ф о р м а ц і ї т і л а є а б с о л ю т н а т а в і д - н о с н а д е ф о р м а ц і ї . Я к щ о п р и д е ф о р м а ц і ї т і л а д е я к а в е л и - ч и н а , я к а х а р а к т е р и з у є р о з м і р и ч и ф о р м у т і л а ( н а п р и к л а д , д о в ж и н а ч и о б ’ є м ) , н а б у в а є з н а ч е н н я X , т о з м і н а ц і є ї в е л и -
ч и н и Х = Х – Х 0 п і д д і є ю п р и к л а д е н о ї с и л и з в е т ь с я а б с о - л ю т н о ю д е ф о р м а ц і є ю . В і д н о ш е н н я а б с о л ю т н о ї д е ф о р м а ц і ї
д о |
п е р в і с н о г о |
з н а ч |
е н н я |
|
Х 0 |
з в е т ь с я |
в і д н о с н о ю |
д е ф о р - |
||
м а ц |
і є ю : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
. |
|
|
( 3 . |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
X 0 |
|
|
|
|
|
З о в н і ш н я |
с и л |
а , |
я к а |
д і є |
н а |
д і л я н к у |
т і л а , |
||
в р і в н о в а ж у є т ь с я с и л о ю п р у ж н о с т і , щ о д і є н а д а н у д і л я н к у з б о к у с у с і д н ь о ї . Ф і з и ч н а в е л и ч и н а , я к а д о р і в н ю є п р у ж н і й
с и л і , щ о п р и п а д а є н |
а о |
д и н и ц ю |
п л о щ і п е р е р і з у т і л а , з в е т ь - |
|||
с я , я к в ж е в к а з у в а л о |
с я , |
н а п р у ж е н н я м : |
||||
|
|
|
|
dF |
пр |
. |
|
|
|
|
|||
|
|
dS |
|
|||
|
|
|
|
|
|
|
|
|
А н г л і й с ь к и й |
ф і з и к |
Р . Г у к |
е к с п е р и м е н т а л ь н о |
д о в і в , щ |
о |
н а - |
|||||||||||||||||||
п р у ж е н н я |
в |
п р у ж н о |
д е ф о р м о в а н о м у |
т і л і п р я м о |
п р о п о р ц і й н е |
д о |
|||||||||||||||||||||
й о г о |
в і д н о с н о ї д е ф о р м а ц і ї ( з а к о н |
Г у к а ) : |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
, |
|
|
|
|
|
|
|
|
( 3 . 2 ) |
||||
д е |
Е |
– м о д у л ь |
п р у ж н о с т і ; |
й о г о |
|
в е л и ч и н а |
в и з н а ч а є т ь с я |
|
в л а с т |
и - |
|||||||||||||||||
в о с т я м и |
м а т е р і а л у , з |
|
я к о г о |
в и г о т о в л е н о |
т і л о . З а л е ж |
н о |
в і д |
т и п у |
|||||||||||||||||||
д е ф о р м а ц і ї |
м о д у л ь |
п р у ж н о с т і |
|
м а є |
р і з н і |
н а з в и , |
п о з н а ч е н н я |
т а |
|||||||||||||||||||
ч и с л о в і з н а ч е н н я . С л і д |
п і д к р е с л и т и , щ о |
з а к о н |
Г у к а |
с п р а в е д л и - |
|||||||||||||||||||||||
в и й |
|
л и ш е |
|
д л я |
д о с т а т н ь о |
м а л и х |
|
в і д н о с н и х |
д е ф о р м а ц і й . |
|
|
|
|
||||||||||||||
|
|
Б у д ь - я к а |
с к л а д н а |
д е ф о р м а ц і я |
т і л а |
м о ж е |
б у т и |
п о д а н а |
я к |
||||||||||||||||||
н а с л і д о к |
|
н а к л а д а н н я |
|
б і л ь ш |
п р о с т и х |
д е ф о р м а ц і й : |
п о з д о в ж н ь о - |
||||||||||||||||||||
г о |
р о з т я г у в а н н я |
ч и |
|
с т и с н е н н я , |
в с е б і ч н о г о |
|
р о з т я г у в а н н я |
ч и |
|||||||||||||||||||
с т и с н е н н я |
т а |
з с у в у . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Д е ф о р м а ц і я |
п о з д о в ж |
н ь о г о |
|
р о з т я г у в а н н я |
|
ч и |
с т и с н е н н я |
|
||||||||||||||||||
|
|
Р о з г л я н е м о |
|
д е ф о р м а ц і ю |
т і л а |
у |
в и п а д к у , |
|
к о л и |
|
о д и н |
к і н е ц ь |
|||||||||||||||
й о г о |
з а к р і п л е н и й , а |
д о |
д р у г о г о |
п р и к л а д е н о |
з о в н і ш |
н ю |
|
с и л у |
F , |
||||||||||||||||||
я к а |
|
р о з т я г у є ц е |
т і л о . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
l0
d
0
d
l
F
п
Мал.3.2.Деформація розтягу бруска.

В і д н о с н а д е ф о р м а ц і я у ц ь о м у в и п а д к у д о р і в н ю в а т и м е
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
д е |
l |
– |
з м і н а д о в ж и н и |
з р а з к а п і д |
д і є ю |
|
з о в н і ш н ь о ї с и л и , l 0 |
– п е р в і с н а |
||||||||||||||||||||||||||||||
д о в ж и н а з р а з к а . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F у р і в н о в а ж у є т ь с я |
|
|
|
|
||||||||||||||
|
У |
|
с т а т и ч н о м у |
с т а н і |
з о в н і ш н я |
|
с и л а |
|
с и л а м и |
|||||||||||||||||||||||||||||
п р у ж н о с т і F п р , щ о |
в и н и к а ю т ь у |
т і л і п р и |
д е ф о р м а ц і ї ( м а л . 3 . 2 ) . |
|
|
|||||||||||||||||||||||||||||||||
|
З а к о н |
Г у к а м а т и м е в и г л я д : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
l |
|
|
|
E |
|
|
, |
|
|
|
|
|
( 3 . 3 ) |
|
|
|||||||||
|
|
F |
S |
|
|
|
|
|
|
l |
0 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
д е |
|
– н о р м а л ь н е |
н а п р у ж е н н я , о с к і л ь к и |
д і ю ч а |
|
с и л а |
|
п е р п е н - |
||||||||||||||||||||||||||||||
д и к у л я р н а |
д о |
п л о щ і п е р е р і з у |
з р а з к а |
S . М о д у л ь |
п р у ж н о с т і Е |
з в е т ь с я |
||||||||||||||||||||||||||||||||
м о д у л е м |
Ю |
н г а . І з з а к о н у |
Г у к а в и п л и в а є , щ о |
Е = σ |
, я к щ о ε = |
1 , т о |
б - |
|||||||||||||||||||||||||||||||
т о |
я к щ о |
l = |
l 0 . І н а к ш е к а ж у ч и , м о д у л ь Ю |
н г а Е д о р і в н ю є н о р м а л ь - |
||||||||||||||||||||||||||||||||||
н о м у |
н а п р у ж е н н ю , |
|
я к е |
в и н и к л о |
|
б |
|
|
|
у |
з р а з к у |
п р и |
з б і л ь ш е н н і |
й о г о |
||||||||||||||||||||||||
д о в ж и н и |
в д в і ч і , я к щ о |
б д л я т а к и х |
|
в е л и к и х |
д е ф о р м а ц і й |
б у в |
|
с п р а в е д - |
||||||||||||||||||||||||||||||
л и в и й |
з а к о н Г у к а . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
З а у в а ж и м о , щ о |
|
п р и |
с т и с н е н н і |
|
з р а з к а |
м о д у л ь |
Ю |
н г а |
|
в і д п о в і д а є |
|||||||||||||||||||||||||||
т а к о м у |
н а п р у ж е н н ю , |
п р и |
я к о м у |
|
д о в ж и н а |
з р а з к а |
п р я м у є |
|
|
д о |
н у л я . |
|||||||||||||||||||||||||||
Р о з т я г ( а б о |
с т и с н е н н я ) з р а з к і в |
з а в ж д и |
с у п р о в о д ж у є т ь с я |
ї х |
п о п е р е ч - |
|||||||||||||||||||||||||||||||||
н и м |
з в у ж е н н я м |
( а б о |
р о з ш и р е н н я м ) , |
т о б т о |
з м і н о ю |
ї х |
п о п е р е ч н и х |
|||||||||||||||||||||||||||||||
р о з м і р і в : |
|
d = |
d – d 0 . |
|
|
|
|
|
|
|
|
п о п е р е ч н о г о р о з м і р у |
д о |
|
в і д н о с н о ї |
|||||||||||||||||||||||
|
В і д н о ш е н н я |
в і д н о с н о ї з м і н и |
|
|||||||||||||||||||||||||||||||||||
з м і н и |
п о з д о в ж н ь о г о |
р о з м і р у |
|
н а з и в а є т ь с я к о е ф і ц і є н т о м |
П у а с с о н а |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
d |
0 |
|
. |
|
|
|
|
|
|
|
|
( |
3 |
. |
4 |
) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
l |
l 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
О с к і л ь к и |
d |
< |
|
0 п р и |
|
l |
> |
0 , т о |
|
μ |
|
> |
0 . Д л я м а т е р і а л і в , щ о |
п о г а - |
|||||||||||||||||||||||
н о |
с т и с к а ю т ь с я , μ |
|
|
= |
1 / 2 . М |
|
а й ж е |
|
в с і |
|
б і о л о г і ч н і |
м а т е р і а л и |
|
, в |
т о м у |
|||||||||||||||||||||||
ч и с л і і с т і н к и |
к р о в о н о с н и х |
|
с у д и н , м а й ж е |
н е |
с т и с к а ю т ь с я , т о м у |
д л я |
||||||||||||||||||||||||||||||||
н и х μ |
|
= 1 / 2 . Д а л і м и |
б у д е м о |
р о з г л я д а т и т і л ь к и |
і з о т р о п н і с е р е д о в и - |
|||||||||||||||||||||||||||||||||
щ а , р е о л о г і ч н і в л а с т и в о с т і я к и х |
о д н а к о в і у |
в с і х |
н а п р я м к а х . |
|
|
|
|
|||||||||||||||||||||||||||||||

Деформація всебічного розтягу або стиснення (об’ємна деформація)
Об’ємна деформація виникає при рівномірному розподілі стискуючих або розтягуючих сил по поверхні тіла (мал. 3.3а).
A |
B F |
r |
M |
в) |
F r |
B |
Мал. 3.3.Види деформацій: а) об ’ємна деформація, б) деформація зсуву, в) кручення, г) згину.
Закон Гука у цьому випадку матиме вигляд:
V ,
V0
де – модуль об’ємної пружності, V та V0 – зміна об’єму тіла та первісний об’єм відповідно. Прикладом напруження, що викликає об’ємну деформацію, є трансмуральний тиск, що
дорівнює різниці тисків |
всередині і зовні |
судини Pтр = |
|||
Pв Pз . Тоді закон Гука набуває вигляду |
|
||||
P |
|
|
V |
. |
(3.5) |
|
|
||||
тр |
|
V0 |
|
||
|
|
|
|
||

Д е ф о р м а ц ія з с у в у
З с у в о м н а з и в а ю т ь т а к у д е ф о р м а ц ію т іл а , к о л и й о г о п л о с к і ш а р и з м і щ у ю т ь с я п а р а л е л ь н о о д и н о д н о м у ( м а л . 3 .3б ) . З с у в в и н и к а є п ід д іє ю д о т и ч н о г о н а п р у ж е н н я :
|
|
|
F |
. |
( 3 .6 ) |
|
|||||
|
|
|
S |
|
|
В і д п о в ід н о д о з а к о н у Г у к а σ τ = Gγ , д е G – м о д у л ь з с у в у , γ = t g γ = C C /C D – к у т з с у в у , щ о з в е т ь с я т а к о ж в ід н о с н и м
з с у в о м |
( Х |
= С С – а б с о л ю т н и й з с у в , я к и й д о р ів н ю є з с у в у |
о д н о г о ш а р у в ід н о с н о і н ш о г о , а C D – в і д с т а н ь м іж ц и м и ш а - |
||
р а м и ) . |
|
|
Д е ф о р м а ц ія к р у ч е н н я
Д е ф о р м а ц ія к р у ч е н н я в и н и к а є у з р а з к у , к о л и о д и н й о г о п е р е р і з н е р у х о м и й , а в ін ш о м у д іє п а р а с и л , м о м е н т я к о ї с п р я - м о в а н и й в з д о в ж о с і з р а з к а ( м а л . 3 .3 в ) . Ц я д е ф о р м а ц ія в и к о р и - с т о в у є т ь с я в к р у т и л ь н и х т е р е з а х .
Д л я к о ж н о г о з р о з г л я н у т и х т и п ів д е ф о р м а ц ій с п о с т е р і - г а ю т ь с я у м е ж а х п р у ж н о ї р е а к ц ії з р а з к а п р я м о п р о п о р ц ій н і з а - л е ж н о с т і м іж н а п р у ж е н н я м т а в ід н о с н о ю д е ф о р м а ц іє ю . К о - е ф іц і є н т и п р о п о р ц і й н о с т і – м о д у л і п р у ж н о с т і – м о ж н а в и р а з и - т и ч е р е з м о д у л ь Ю н г а ( Е ) т а к о е ф іц іє н т П у а с с о н а ( ) м а - т е р іа л у , т о б т о д л я п р у ж н и х д е ф о р м а ц ій із о т р о п н и х т іл Е т а п о в н іс т ю в и з н а ч а ю т ь р е а к ц ію з р а з к а н а п р и к л а д е н і н а п р у ж е н - н я . Н а п р и к л а д , м о д у л ь о б ’ є м н о ї п р у ж н о с т і т о н к о ї с т і н к и с у - д и н и м о ж н а п о д а т и у в и г л я д і
= 2 h E ( 1 – 2 ) R , ( 3 .7 ) д е h і R – т о в щ и н а с т ін к и т а р а д іу с с у д и н и в ід п о в ід н о , h < < R .

|
|
|
D |
|
м |
|
|
|
|
пл |
|
C |
|
E |
пр |
A B |
|
|
|
|
|
|
||
проп |
|
|
|
|
|
O |
|
|
|
0 |
1 |
|
|
|
зал |
0.005 |
0.01 |
Мал. 3.4. Діаграмарозтягу длясталі.
Експериментально отриману при деформації залежність
напруження, що виникає у зразку, від відносної деформації на- зивають діаграмою деформації. Типовий вигляд діаграми роз- тягу металевого зразка подано на мал. 3.4.
Наведену криву можна умовно поділити на п’ять зон. Зона ОА має назву зони пропорційності. У межах цієї зони вик о- нується закон Гука. Зона OB – це зона пружності, де після зняття напруження тіло відновлює свої розміри і форму. Зона ВC зветься зоною загальної плинності. У цій зоні подовження зразка відбувається без помітного збільшення напруження. Зо- на СD – це зона зміцнення, у цій зоні подовження зразка супро- воджується зростанням напруження, на зразкові з’являється місце майбутнього розриву – шийка, формування якої (точка D) супроводжується процесом місцевої плинності в зоні DE і роз- ривом зразка. Якщо зменшувати навантаження у зоні ВC, то відповідний графік σ = f (ε) піде паралельно ОА і перетне вісь абсцис у деякій точці О1. Відрізок ОО1 визначає залишкову де- формацію εзал, що характеризує пластичну деформацію зразка. Отримання діаграми деформації дозволяє визначити ряд най- важливіших характерних точок і відповідних їм величин: