

4.6.2. Приведение системы сил к паре сил
![]()
Если при приведении системы сил к центру
О
![]() то на основании (6.4) можно записать
то на основании (6.4) можно записать
![]() (4.25)
(4.25)
В этом случае система сил приводится к
паре силс момен-том, равным главному
моменту и![]() ,
так как, вследствие того, что
,
так как, вследствие того, что![]() ,
в соотношении (4.17)
,
в соотношении (4.17)![]() .
.
4.6.3.
Приведение системы сил в случае, когда
![]()
Если
при приведении системы сил к центру О
![]() то на основании
(6.4) можно записать
то на основании
(6.4) можно записать
![]() ,
(4.26)
,
(4.26)
т.е. система сил находится в равновесии.
Этот вопрос подробно рассматривается в главе 5.
4.6.4. Приведение системы сил к динаме
![]()
Определение: Система, состоящая из силы и пары сил, момент которой коллинеарен силе (плоскость пары перпендикулярна линии действия силы), называется динамой или динамическим винтом (рис. 30).
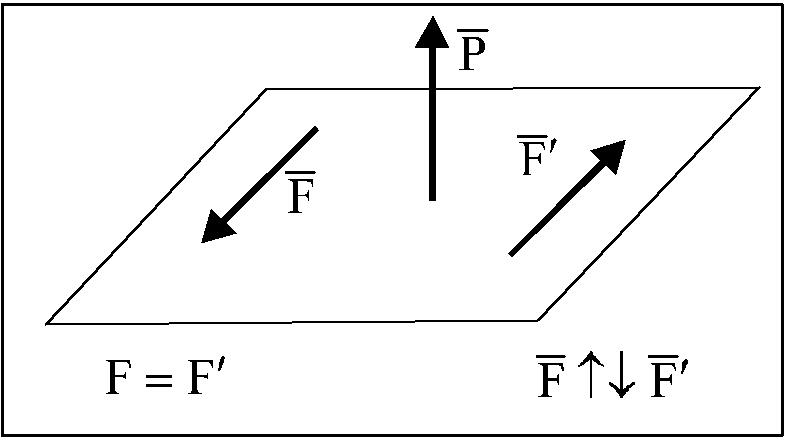
Рис. 30
Если при приведении системы сил к центру О второй инвариант не равен нулю, то эта система сил приводится к динаме (рис. 31).
Разложив
![]() на две составляющие
на две составляющие![]() - вдоль главного вектора и
- вдоль главного вектора и![]() - перпендикулярно главному вектору, для
- перпендикулярно главному вектору, для![]() и
и![]() будем иметь случай 4.6.1б. Вектор
будем иметь случай 4.6.1б. Вектор![]() ,
будучи свободным вектором, переносится
параллельно самому себе в точку О1):
,
будучи свободным вектором, переносится
параллельно самому себе в точку О1):
 Вектора
Вектора
![]() представляют собой динаму,
представляют собой динаму,
где
![]() ,
,
![]() .
.
В
рассматриваемом случае приведения
системы сил главный момент
![]() имеет минимальное значение. Причем это
значение момента сохраняется при
приведении заданной системы сил к любой
точке, лежащей на линии действия главного
вектора
имеет минимальное значение. Причем это
значение момента сохраняется при
приведении заданной системы сил к любой
точке, лежащей на линии действия главного
вектора![]() и главного момента
и главного момента![]() (рис. 31). Уравнение этой линии, называемой
центральной (осью динамы), определяется
из условия коллинеарности векторов
(рис. 31). Уравнение этой линии, называемой
центральной (осью динамы), определяется
из условия коллинеарности векторов![]() и
и![]() :
:
 .
(4.27)
.
(4.27)
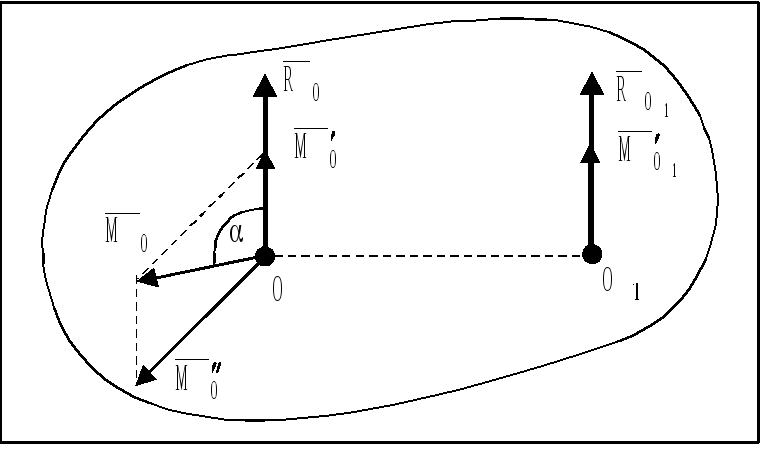
Рис. 31
В соответствии с соотношениями (4.16) и (4.17)
![]() ,
,
![]() ,
,
тогда уравнение центральной оси динамы в векторной форме можно записать так:
 .
.
Проектируя это соотношение на оси декартовой системы координат с началом в центре приведения О, получим:
![]()
![]() .
(4.28)
.
(4.28)
Здесь x, y, z – координаты точек, лежащих на центральной оси, а р – постоянная линейная величина, называемая параметром динамы.
4.7. Алгоритм решения задач по приведению систем сил к простейшим системам – схема алгоритма c04 ппв с комментариями и примерами

Комментарии К.2. На рисунке изображаются все силы, действующие на НМС, и выбирается система координат с началом в центре приведения.
К.3. В некоторых случаях для нахождения проекции силы на ось удобнее найти сначала ее проекции на плоскость, в которой эта ось лежит, а затем найденную проекцию на плоскость спроектировать на данную ось. Косинусы и синусы углов, необходимые для определения проекций сил, находятся из геометрических соображений или они даны.
К.4. Моменты сил относительно координатных осей находятся с использованием определения (п. 1.3.2) или формулы (1.6). В некоторых случаях удобнее сначала разложить силу на составляющие вдоль осей координат, а затем найти моменты этих составляющих относительно координатных осей. Если линия действия силы пересекает ось или ей параллельна, то момент такой силы относительно оси равен нулю. Необходимые расстояния находятся из геометрических соображений или они даны.
К.5.
Направляющие
косинусы векторов
![]() и
и![]() могут быть найдены по известным формулам
из векторного анализа.
могут быть найдены по известным формулам
из векторного анализа.
К.7.
![]() - второй инвариант статики.
- второй инвариант статики.
К.8г,в.
Если
![]() ,
но
,
но![]() = 0, то равнодействующая рассматриваемой
системы сил совпадает по величине и
направлению с главным вектором, а ее
линия действия отстоит от линии действия
главного вектора на расстоянии ОО1,
определяемом соотношением
= 0, то равнодействующая рассматриваемой
системы сил совпадает по величине и
направлению с главным вектором, а ее
линия действия отстоит от линии действия
главного вектора на расстоянии ОО1,
определяемом соотношением
![]() .
При этом
.
При этом![]() и тройка векторов
и тройка векторов![]() - правая.
- правая.
К.9г.
Динамический
винт (динама) состоит из силы
![]() и пары с модулем момента
и пары с модулем момента
![]() ,
здесь
,
здесь
![]() и
и
![]() .
.
Положение
точки
![]() определяется формулой
определяется формулой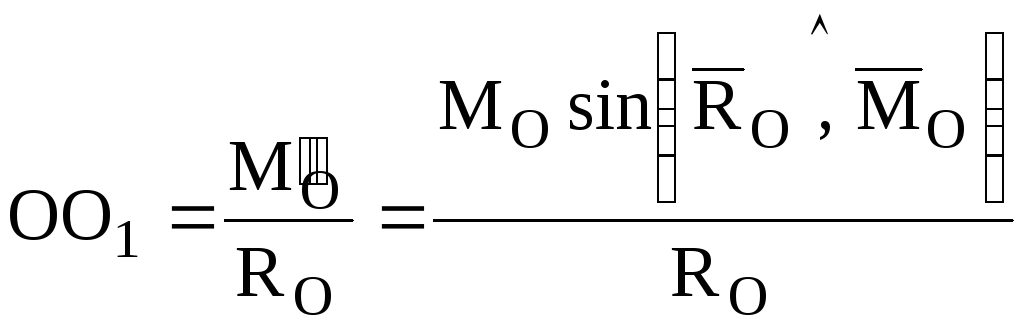 .
При этом
.
При этом![]() и тройка векторов
и тройка векторов![]() - правая.
- правая.
Уравнение центральной оси может быть записано на основании соотношения (4.28).
К.9. Результаты приведения системы сил к простейшим системам, кроме случая 9а, могут быть изображены на рисунке.