

Глава 4. Приведение пространственной
и плоской систем сил
4.1. Основная теорема статики или теорема о параллельном переносе силы
Теорема: Силу, приложенную в некоторой точке НМС, не изменяя ее действия на НМС, можно переносить параллельно самой себе в любую другую точку НМС, добавляя при этом пару сил (присоединенная пара) с моментом, равным моменту силы относительно новой точки ее приложения (рис. 24).
Доказательство:
Сила
![]() приложена в точке О1.
Добавив уравновешенную систему двух
сил, приложенных в произвольной точке
О2,
равных по модулю и параллельных силе
приложена в точке О1.
Добавив уравновешенную систему двух
сил, приложенных в произвольной точке
О2,
равных по модулю и параллельных силе
![]() ,
получим:
,
получим:
 ,
,
![]() ,
(4.1)
,
(4.1)
![]() ,
,
![]() .
(4.2)
.
(4.2)
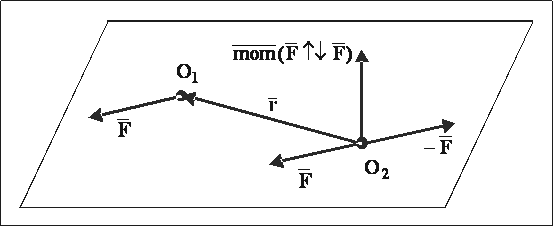
Рис. 24
4.2. Приведение систем сил к центру
4.2.1. Пространственная система сил
Пусть
имеется произвольная пространственная
система сил
![]() .
Используя основную теорему статики,
перенесем все силы системы параллельно
самим себе в произвольный центр О (рис.
25):
.
Используя основную теорему статики,
перенесем все силы системы параллельно
самим себе в произвольный центр О (рис.
25):
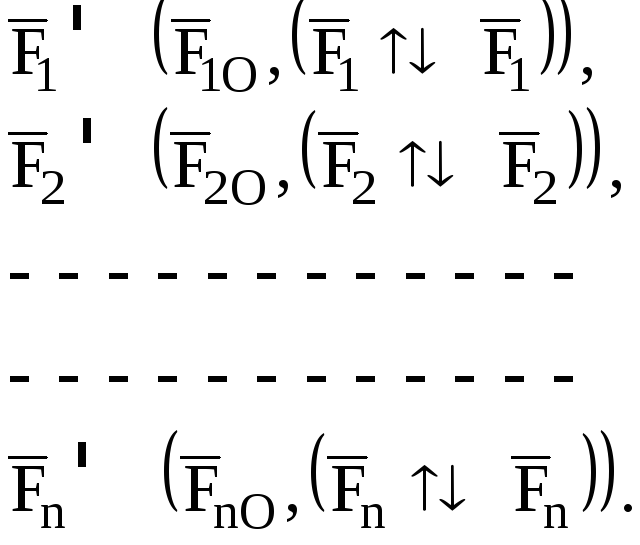
В результате получим:
![]()
система сходящихся система пар
сил в точке О

Рис. 25
Система сходящихся сил (глава 2) приводится к одной силе:
![]() ,
,
где на основании соотношения (2.1) можно записать:
![]() .
(4.3)
.
(4.3)
Система пар (глава 3) приводится к одной паре:
![]()
момент которой на основании соотношений (3.10), (4.2) и (1.2) определится формулой:
![]() .
(4.4)
.
(4.4)
Итак,
![]() (4.5)
(4.5)
или условно можно записать:
![]() .
(4.6)
.
(4.6)
Таким образом, произвольная система сил всегда может быть приведена в произвольно выбранной точке – центре приведения к силе, равной геометрической сумме всех сил и называемой ее главным вектором, и к паре сил с моментом, равным геометрической сумме моментов всех сил системы относительно центра приведения и называемым ее главным моментом.
4.2.2. Плоская система сил
Пусть
имеется плоская система сил
![]() .
Взяв в качестве центра приведения
произвольную точку на плоскости действия
сил, можно сделать следующие выводы,
учтя, что все моменты сил, лежащих в
одной плоскости, относительно точки
плоскости перпендикулярны этой плоскости:
.
Взяв в качестве центра приведения
произвольную точку на плоскости действия
сил, можно сделать следующие выводы,
учтя, что все моменты сил, лежащих в
одной плоскости, относительно точки
плоскости перпендикулярны этой плоскости:
Главный вектор плоской системы сил всегда лежит в плоскости действия сил (рис. 26).
Главный момент равен по величине алгебраической сумме величин моментов сил относительно центра приведения и перпендикулярен плоскости действия сил (рис. 26).
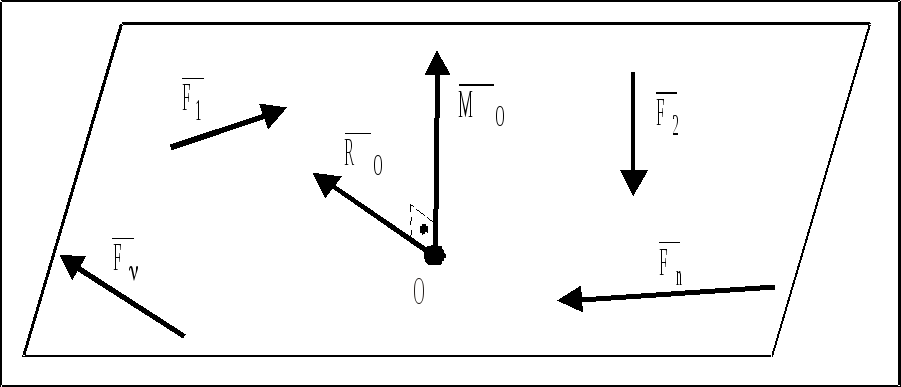
Рис. 26
![]() ,
(4.7)
,
(4.7)
![]() .
(4.8)
.
(4.8)
![]() ,
(здесь
,
(здесь
![]() )
(4.9)
)
(4.9)
.
4.3. Формулы для нахождения главного вектора и главного момента
4.3.1. Пространственная система сил
Проектируя соотношение (4.3) на оси декартовой системы координат с началом в центре приведения, получим проекции главного вектора пространственной системы сил на эти оси:
![]() (4.10)
(4.10)
Модуль главного вектора и его направляющие косинусы определяются по известным формулам векторного анализа:
![]() ,
(4.11)
,
(4.11)
![]() (4.12)
(4.12)
Проектируя соотношение (4.4) на оси декартовой системы координат с учетом связи между моментом силы относительно точки и оси, получим проекции главного момента пространственной системы сил на эти оси:
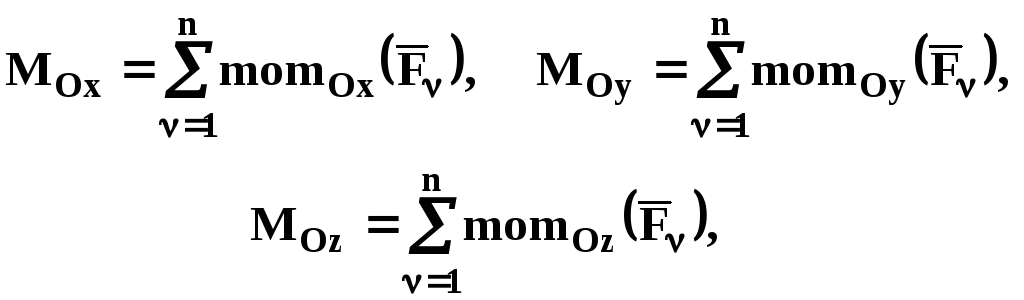 (4.13)
(4.13)
где
![]() – моменты силы
– моменты силы![]() относительно осей декартовой системы
координат.
относительно осей декартовой системы
координат.
Модуль главного момента и его направляющие косинусы определяются по известным формулам векторного анализа:
![]() .
(4.14)
.
(4.14)
 (4.15)
(4.15)