

1.7. Цепные передачи
Ц епная
передача состоит из двух колес с зубьями
(звездочек) и охватывающей их цепи.
Наиболее распространены передачи с
втулочно-роликовой цепью (рис.9, а) и
зубчатой цепью (рис.9, б). Цепные передачи
применяются для передачи средних
мощностей (не более 150кВт)
между параллельными валами в случаях,
когда межосевые расстояния велики для
зубчатых передач.
епная
передача состоит из двух колес с зубьями
(звездочек) и охватывающей их цепи.
Наиболее распространены передачи с
втулочно-роликовой цепью (рис.9, а) и
зубчатой цепью (рис.9, б). Цепные передачи
применяются для передачи средних
мощностей (не более 150кВт)
между параллельными валами в случаях,
когда межосевые расстояния велики для
зубчатых передач.
Преимуществами цепных передач являются:
- отсутствие проскальзывания;
- достаточная быстроходность (20-30 м/с);
- сравнительно большое передаточное число (7 и более);
- высокий КПД;
- возможность передачи движения от одной цепи нескольким звездочкам;
- небольшая нагрузка на валы, т.к. цепная передача не нуждается в предварительном натяжении цепи необходимом для ременной передачи.
Недостатками цепных передач являются:
- вытяжка цепей вследствие износа шарниров;
- более высокая стоимость передачи по сравнению с ременной;
- необходимость регулярной смазки;
- значительный шум.
По назначению цепи подразделяют на приводные, используемые в приводах машин; тяговые, применяемые в качестве тягового органа в конвейерах, и грузовые, используемые для подъема грузов.
Звездочки. По конструкции звездочки похожи на зубчатые колеса. Делительная окружность звездочки проходит через центры шарниров цепи. Профилирование их зубьев выполняют по стандарту. Ширина b зубчатого венца звездочки принимается несколько меньшей расстояния между внутренними пластинками. Звездочки больших размеров выполняют составными.
1.8. Передача винт-гайка
Передача винт-гайка служит для преобразования вращательного движения в поступательное. Широкое применение таких передач определяется тем, что при простой и компактной конструкции удается осуществить медленные и точные перемещения.
К преимуществам передачи относятся простота и компактность конструкции, большой выигрыш в силе, точность перемещений.
Недостатком передачи является большая потеря на трение и связанный с этим малый КПД.
В винтовой передаче вращение винта 1 вызывает поступательное перемещение гайки 2 (рис.10), а вращение гайки 2 приводит к поступательному перемещению винта 1.
П ередаточное
отношение: В винтовых механизмах винт
или гайка приводится в движение с помощью
маховика, шестерни и др. Передаточное
отношение для этих передач можно условно
выразить соотношением окружного
перемещения маховикаSм
к перемещению гайки (винта) Sr:
ередаточное
отношение: В винтовых механизмах винт
или гайка приводится в движение с помощью
маховика, шестерни и др. Передаточное
отношение для этих передач можно условно
выразить соотношением окружного
перемещения маховикаSм
к перемещению гайки (винта) Sr:
i = Sм Sr = πdм p1
где: dм– диаметр маховика (шестерни и т.п.);р1– ход винта.
Зависимость между окружной силой Ft на маховике и осевой силой Fa на гайке определяется как:
Ft = Faiη
где: η– КПД винтовой пары.
2. Электроприводы этус
Под электроприводом понимается электромеханический комплекс, преобразующий электрическую энергию в механическую и обеспечивающий управление преобразованной энергией согласно требованиям технологического процесса. Обобщённая структурная схема электропривода представлена на рис.11.
И сточник
питания – устройство, преобразующее
электроэнергию промышленной сети в
форму, необходимую для работы
электродвигателя. Сюда относятся:
выпрямители, трансформаторы, инверторы.
В случае повышенных требований к
стабильности работы электродвигателя
– стабилизаторы. При повышенных
требованиях к электромагнитной
совместимости – фильтры и компенсирующие
устройства.
сточник
питания – устройство, преобразующее
электроэнергию промышленной сети в
форму, необходимую для работы
электродвигателя. Сюда относятся:
выпрямители, трансформаторы, инверторы.
В случае повышенных требований к
стабильности работы электродвигателя
– стабилизаторы. При повышенных
требованиях к электромагнитной
совместимости – фильтры и компенсирующие
устройства.
Электродвигатель – устройство, преобразующее электрическую энергию в механическую.
Механическая передача преобразует механическую энергию электродвигателя в форму необходимую для движения объекта с заданным параметрами. То есть, обеспечивает требуемый вид движения (вращательный или поступательный) и требуемую скорость движения.
Система управления обеспечивает изменение параметров работы электропривода в зависимости от требований технологического процесса (изменение направления движения, изменение скорости).
Под рабочим органом понимается элемент электропривода, непосредственно обеспечивающий выполнение технологической операции. На пример: лопасти вентилятора, ведущий вал конвейера и т.д.
В зависимости от характера технологического процесса электропривод может быть организован следующим образом.
1. Однодвигательный привод. В случае если один электродвигатель приводит в действие один рабочий орган (рис.11). Как пример: привод вентилятора, привод шпинделя сверлильного станка и т.д.
2. Многодвигательный привод. В случае если для обеспечения необходимого движения рабочего органа используется совокупность двигателей (рис.12 а). Таким образом организован привод многокоординатных фрезерных станков, привод электроэрозионных станков и т.д.
3. Групповой (трансмиссионный) привод. В случае если один электропривод, через механическую передачу (трансмиссию), приводит в движение несколько идентичных рабочих органов (рис.12б). (В силу сложности используемой в данном случае механической передачи, на сегодняшний день, подобный способ организации привода в промышленности фактически не применяется).

Так же, исходя из особенностей технологического процесса, электропривод может быть организован как на основе традиционного электродвигателя (двигатель вращения) или на основе линейного.
В линейном двигателе подвижная часть не вращается (как в традиционных двигателях), а перемещается линейно (в некоторых случаях возвратно – поступательно) вдоль неподвижной части – разомкнутого магнитопровода произвольной длины, в котором создаётся бегущее магнитное поле. В отличие от обычного электродвигателя, где ротор и статор свёрнуты в кольца, в линейном электродвигателе они растянуты в полосы. Включаясь поочерёдно, обмотки статора и создают бегущее магнитное поле (рис.13).
Л инейный
электродвигатель постоянного тока
состоит из якоря с расположенной на нём
обмоткой, служащей одновременно
коллектором (направляющий элемент), и
разомкнутого магнитопровода с обмотками
возбуждения (подвижная часть),
расположенными так, что векторы сил,
возникающих под полюсами магнитопровода,
имеют одинаковое направление.
Перемещающийся элемент двигателя
называется бегуном. Для получения
постоянного по величине усилия при
движении бегуна размеры статора и бегуна
выбирают различными.
инейный
электродвигатель постоянного тока
состоит из якоря с расположенной на нём
обмоткой, служащей одновременно
коллектором (направляющий элемент), и
разомкнутого магнитопровода с обмотками
возбуждения (подвижная часть),
расположенными так, что векторы сил,
возникающих под полюсами магнитопровода,
имеют одинаковое направление.
Перемещающийся элемент двигателя
называется бегуном. Для получения
постоянного по величине усилия при
движении бегуна размеры статора и бегуна
выбирают различными.
О сновное
преимущество таких двигателей состоит
в отсутствии кинематических цепей для
преобразования вращательного движения
в линейное, что существенно упрощает
конструкцию приводимого в движение
механизма и повышает его КПД и точность.
Пример использования линейного двигателя
представлен на рис.14. Недостатком
является ограниченная номенклатура
серийно выпускаемых линейных двигателей.
сновное
преимущество таких двигателей состоит
в отсутствии кинематических цепей для
преобразования вращательного движения
в линейное, что существенно упрощает
конструкцию приводимого в движение
механизма и повышает его КПД и точность.
Пример использования линейного двигателя
представлен на рис.14. Недостатком
является ограниченная номенклатура
серийно выпускаемых линейных двигателей.
Классификация исполнительных электродвигателей, представленная на рис.15 основана на механических характеристиках. Каждый их типов электродвигателей имеет собственную уникальную характеристику.

Под механической характеристикой понимается зависимость скорости вращения вала от нагрузки, т.е. создаваемого ею момента w = f(M)
Механическая характеристика обусловлена непосредственно конструкцией двигателя и может иметь принципиальное значение при выборе двигателя привода. Внешний вид механических характеристик представлен на рис.16. Где: Мкз – момент короткого замыкания, возникает в случае равенства момента, создаваемого нагрузкой, с моментом, развиваемым двигателем; wхх – скорость холостого хода, т. е. скорость при отсутствии нагрузки.
Для асинхронного двигателя механическая характеристика представлена относительно скольжения (s), которое определяется как:
![]() ;
;
где: ω
- угловая скорость ротора (рад/с); ω0
- угловая скорость вращающегося магнитного
поля статора (рад/с); ![]() ;f1– частота питающей сети;р– число
пар полюсов.
;f1– частота питающей сети;р– число
пар полюсов.
В данном случае Мкз будет соответствовать s=1, а переход из устойчивого состояния в неустойчивое, будет характеризоваться критичным моментом (Мкр) и соответствующим ему критичным скольжением (sкр).
Ш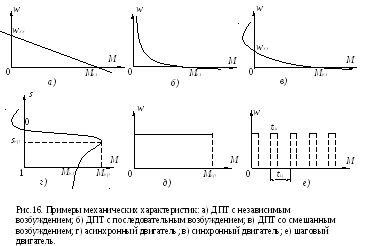 аговый
двигатель является частным случаем
синхронного двигателя и, в силу дискретного
характера его работы, может характеризоваться
временем цикла (время между шагами (tц))
и временем шага (tш).
аговый
двигатель является частным случаем
синхронного двигателя и, в силу дискретного
характера его работы, может характеризоваться
временем цикла (время между шагами (tц))
и временем шага (tш).
На основании приведенных характеристик можно сделать предварительный анализ исполнительных электродвигателей. Так ДПТ с независимым возбуждением имеет прямолинейную характеристику, что делает его перспективным для использования в технологических процессах требующих высокой точности поддержания скорости.
Характеристика ДПТ с последовательным возбуждением обуславливает резкое увеличение скорости при уменьшении момента, вплоть до разрушения двигателя. Отсюда, данный тип двигателя в производстве фактически не используется.
ДПТ со смешанным возбуждением данного недостатка не имеет, но отличается сложностью конструкции и фактически так же не применяется в производстве.
Асинхронный двигатель - наиболее дешёвый и компактный двигатель на сегодняшний день. При этом для большинства производственных задач, участок механической характеристики до sкр, может считаться прямолинейным.
Синхронный двигатель по сравнению с асинхронным отличается худшими массо – габаритными показателями и сложностью конструкции, но в некоторых случаях абсолютно жёсткая характеристика может иметь принципиальное значение.
Основным преимуществом шагового двигателя является обеспечение высокого момента при низких скоростях без использования дополнительных механических передач. Однако дискретный характер движения в некоторых случаях исключает использование привода на его основе.
С точки зрения организации управления параметрами электропривода, возможны следующие варианты.
1 .
Разомкнутое (программное) управление
– в случае если воздействие системы
управления на привод не зависит от его
реального состояния (рис.17а). Наибольшее
распространение данный тип управления
получил в приводах на основе шагового
двигателя.
.
Разомкнутое (программное) управление
– в случае если воздействие системы
управления на привод не зависит от его
реального состояния (рис.17а). Наибольшее
распространение данный тип управления
получил в приводах на основе шагового
двигателя.
2 Замкнутое управление (следящий привод) – в случае воздействия системы управления на привод на основе контроля выходных параметров (скорости, положения, момента). В зависимости от требований технологического процесса обратная связь может быть реализована или по одному из выходных параметров или по всей их совокупности (рис.17б) путем введения датчиков обратной связи по скорости (Дс) и по положению (Дп). Так как изменение момента на валу двигателя вызывает изменение тока в его цепи, то это изменение и используется в качестве параметра характеризующего момент.
По принципу воздействия системы управления на объект различают:
- непрерывное регулирование – в случае система управления оказывает воздействие на объект в любой момент времени;
- релейное (позиционное регулирование) – если управляющее воздействие имеет четко определенные установки (частный случай: вибрационное регулирование);
- импульсное регулирование (цифровое регулирование) – в случае, если управляющее воздействие представляет собой отдельные импульсы через равные промежутки времени.