2. Расчеты на прочность при кручении.
Условие прочности при кручении с учетом принятых обозначений формулируется следующим образом: максимальные касательные напряжения, возникающие в опасном сечении вала, не должны превышать допускаемых напряжений и записывается в виде
,
![]() (5.6)
(5.6)
где берется либо на основании опытных данных, либо (при отсутствии нужных опытных характеристик) по теориям прочности, соответствующим материалу.
Билет №11
Кинематика. Способы задания движения точки.
Кинематика – раздел механики, в котором изучаются движение материальных тел с геометрической точки зрения, без учета массы и действующих на них сил. Способы задания движения точки: 1) естественный, 2) координатный, 3) векторный. Траектория точки – непрерывная кривая, которую описывает точка при своем движении.
Естественный сп. указывается траектория точки, закон ее движения по этой траектории, начало и направление отсчета дуговой координаты: s=f(t) – закон движения точки. При прямолинейном движении: х=f(t).
Координатный сп. положение точки в пространстве определяется тремя координатами, изменения которых определяют закон движения точки: x=f1(t), y=f2(t), z=f3(t).
Если движение в плоскости, то два уравнения движения. Уравнения движения описывают уравнение траектории в параметрической форме. Исключив из уравнений параметр t, получаем уравнение траектории в обычном виде: f(x,y)=0 (для плоск-ти).
Векторный сп. положение точки определяется ее радиус-вектором , проведенным из какого-либо центра. Кривая, которая вычерчивается концом какого-либо вектора, назыв. годографом этого вектора. Т.е. траектория – годограф радиус-вектора.
2. Расчеты на жесткость при кручении.
В качестве меры жесткости при кручении принимают угол закручивания или (чаще) относительный угол закручивания (угол закручивания на единицу длины) вала, обозначаемый
Из приведенного примера должно быть ясно, что в отличие от допускаемого напряжения, зависящего в первую очередь от материала вала, допускаемый угол закручивания зависит от назначения вала. Величины допускаемых углов закручивания, встречающихся в различных отраслях машиностроения, весьма разнообразны.
Условие жесткости при кручении имеет вид
![]()
При проектировочном расчете отсюда определяют требуемую величину , а затем вычисляют диаметр вала. Из двух значений диаметра вала, определенных из расчетов на прочность и жесткость, в качестве окончательного (исполнительного размера) должен быть, конечно, принят больший.
Билет №12
Скорость точки при различных способах задания движения.
Положение точки определяется пространственными параметрами: радиус-вектором, декартовыми координатами, дуговой координатой и др. Скорость точки является пространственно - временным параметром.
Скоростью точки называется кинематический параметр, характеризующий быстроту изменения положения точки в системе отсчета с течением времени.
Скорость точки при векторном способе задания движения.
![]()
Пусть движение точки относительно тела отсчета задано ее радиус-вектором r(t). Тогда, по определению, скоростью точки будет векторная производная радиус-вектора r по скалярному аргументу - времени t:
Пусть движение точки задано в декартовой системе координат Oxyz, которую считаем неподвижной, и известны кинематические уравнения движения точки: x = x(t); y = y(t); z = z(t). Используя равенство (5) в п. 26, по формуле (1) выражаем скорость точки:
![]()
Так как система координат Oxyz неподвижна, ее единичные векторы i,j,k постоянны (не меняют ни величину, ни направление), то слагаемые, содержащие производные этих векторов, равны нулю и
![]()
Проекциями вектора скорости на оси координат являются сомножители перед единичными векторами, следовательно,
![]()
Зная проекции скорости на оси координат, можно определить величину вектора скорости:
![]()
Направление вектора скорости определяется тремя направляющими косинусами: (11)
![]()
Формула (9) позволяет не только определить скорость аналитически, но и построить вектор скорости геометрически. По этой формуле вектор скорости можно представить как сумму трех взаимно перпендикулярных составляющих: (12)
![]()
где (13)
![]()
Геометрически сложив составляющие, найдем вектор скорости. При построении составляющих по формулам (21) нужно учитывать: 1) если производная координаты положительна, то направление составляющей совпадает с направлением единичного вектора координатной оси; 2) если производная отрицательна, составляющая направлена в противоположную сторону.
Нахождение скорости при естественном способе задания движения.
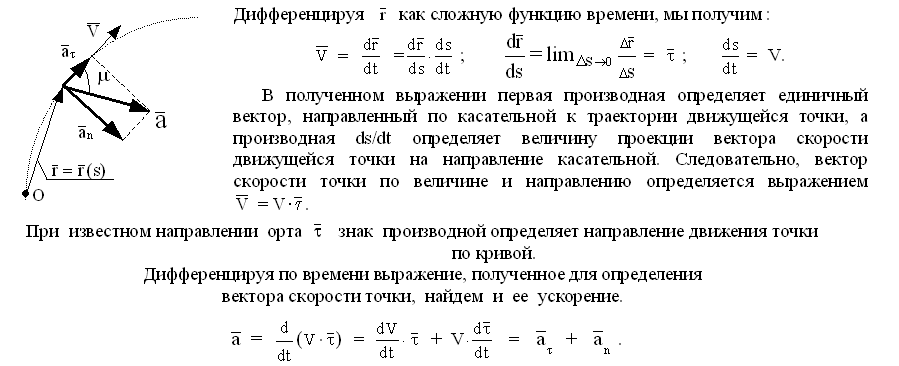
При движении точки по траектории радиус-вектор будет меняться с изменением дуговой координаты, а сама дуговая координата является функцией времени, то есть радиус-вектор является сложной функцией времени r = r (s(t)). По формуле (1) выразим вектор скорости точки: (14)
![]()
Рассмотрим вектор dr / ds. Согласно формуле (14), этот вектор направлен по касательной к траектории, так как скорость направлена по касательной, а так как при Δs 0 предел отношения длины дуги |Δs| к длине ее хорды MM1 = Δr (рис. 61) равен единице, то по модулю он равен единице. Следовательно, (15)
![]()
где является единичным вектором касательной к траектории в точке M.
Вектор всегда направлен в сторону возрастания дуговой координаты. На рис. 61 показан случай, когда Δs > 0 (дуговая координата точки больше координаты точки M1). Сам вектор Δ/Δs направлен в сторону вектора Δ, в сторону положительного отсчета дуги. Когда Δs < 0 , точка M1 будет находиться ближе к началу отсчета, чем точка M, вектор Δ изменит направление, а вектор Δ/Δs будет направлен в сторону, противоположную Δ (Δs - отрицательное), то есть, по-прежнему, в сторону возрастания дуговой координаты.
Подставляя выражение (15) в формулу (14), получаем (16)
![]()
Модуль вектора скорости равен V =| |. Когда > 0, вектор скорости направлен по вектору , когда < 0 , он имеет направление, противоположное вектору .
Величину часто называют алгебраической скоростью точки, считая ее проекцией вектора скорости на касательную к траектории точки.
Изгиб. Основные понятия и определения.
Весьма часто стержни подвергаются действию поперечной нагрузки или внешних пар (рис. 3.1).
При этом в поперечных сечениях стержня возникают изгибающие моменты, т.е. внутренние моменты, плоскость действия которых перпендикулярна плоскости поперечного сечения стержня.
При действии такой нагрузки ось стержня искривляется.
Указанный вид нагружения называют изгибом. Стержни, работающие в основном на изгиб, обычно называют балками. Изгиб называют чистым, если изгибающий момент является единственным внутренним усилием, возникающим в поперечном сечении стержня.
Чаще, однако, в поперечных сечениях стержня наряду с изгибающими моментами возникают тоже и поперечные силы. Такой изгиб называют поперечным.

Если плоскость действия изгибающего момента (силовая плоскость) проходит через одну из главных центральных осей поперечного сечения стержня, изгиб называют простым или плоским (применяется также название: прямой изгиб).
Если плоскость действия изгибающего момента в сечении не совпадает ни с одной из главных осей сечения, изгиб называют косым.
Далее будет показано, что при плоском изгибе ось балки и после деформации остается в плоскости внешних сил - силовой плоскости. При косом изгибе плоскость деформации не совпадает с силовой плоскостью
Билет №13
Ускорение точки при различных способах задания движения.
Под ускорением точки понимается ее кинематическая характеристика, определяемая как вторая производная по времени от радиус-вектора движущейся точки.

При координатном способе задания движения: