

Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Магнитогорский государственный технический университет им. Г.И. Носова»
Кафедра промышленной кибернетики и
систем управления
ГРАДУИРОВКА ОРГАНОВ НАСТРОЙКИ
РЕГУЛИРУЮЩЕГО ПРИБОРА Р25.1
Методические указания к лабораторной работе
по дисциплине «Технические средства автоматизации»
для студентов
специальности 220301 и направления 220200
Магнитогорск
2010
Составитель Ю.С. Артамонов
Градуировка органов настройки регулирующего прибора Р25.1: Методические указания к лабораторной работе по дисциплине «Технические средства автоматизации» для студентов специальности 220301 и направления 220200. Магнитогорск: МГТУ, 2010. 12 с.
В инструкции приводятся основные теоретические сведения о принципах построения регуляторов с использованием электрических регулирующих устройств с импульсным выходным сигналом и исполнительным механизмом постоянной скорости, рассматривается одна из технических реализаций ПИ-регулятора, детально изучается методика экспериментального определения статических характеристик ПИ-регулятора, исследуется влияние настроек регулятора на вид переходного процесса в регуляторе.
Рецензент: канд. техн. наук, доц. Леванов В.В.
© Ю.С. Артамонов
Градуировка органов настройки регулирующего прибора р25.1
Цель работы:
1) изучить принципы работы импульсного ПИ-регулятора;
2) изучить принцип действия прибора Р25.1;
3) изучить подключение прибора;
4) отградуировать органы настройки прибора.
1. Структурная схема импульсного пи-регулятора
Совокупность технических средств, состоящая из регулирующего устройства с импульсным выходным сигналом и исполнительным механизмом (ИМ) интегрирующего типа с соответствующим пусковым устройством образует электрический регулятор, который в пульсирующем режиме позволяет формировать в первом приближениизакон ПИ-регулирования.
Регулирующее устройство с импульсным выходным сигналом выполняет функции релейного усиления в прямом канале, содержащем релейный элемент, и формирование динамических свойств регулятора с помощью контура функциональной обратной связи.
Будем считать, что исполнительная часть регулятора, включающая пусковое устройство и ИМ, выполняют вместе функции усиления и интегрирования выходного сигнала регулирующего устройства. В результате динамические свойства исполнительной части электрического регулятора можно в линеаризованном виде характеризовать следующей передаточной функцией интегрирующего звена:
WИМ(р) = 1 / ТИМ р.
Поэтому структурную схему регулятора вместе с исполнительной частью можно представить в виде, изображённом на рис. 1.
Обобщённая структурная схема регулирующего устройства содержит трёхпозиционный релейный элемент, охваченный частотнозависимой отрицательной обратной связью с передаточной функцией Wо.с(р), и входное звено с передаточной функциейWвх.(р).
Трёхпозиционный релейный элемент характеризуется коммутируемым выходным напряжением z, зоной нечувствительностин, зоной возвратав и порогом отпусканияотп = н / 2 – в.
Р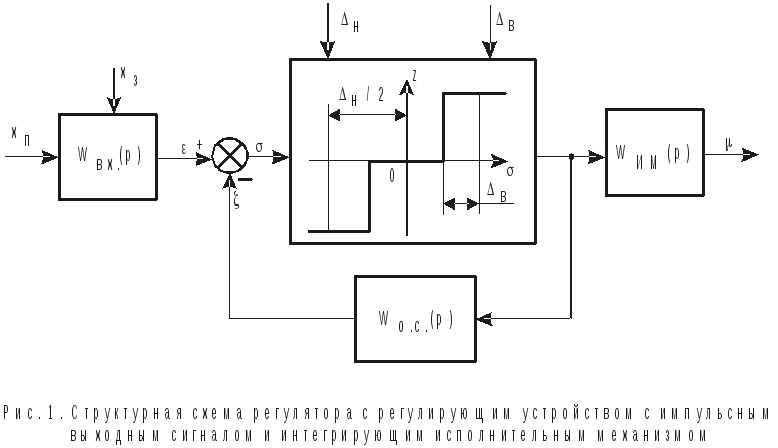 елейный
элемент срабатывает только при таких
уровнях входного сигналаσ, при
которых имеет место неравенство
елейный
элемент срабатывает только при таких
уровнях входного сигналаσ, при
которых имеет место неравенство
= – = (хп - хз ) - > н / 2 ,
где = хп – хз– рассогласование;
хпихз– соответственно текущее и заданное значения параметра регулирования.
Релейный элемент выключается тогда, когда сигнал достигнет значения
= н / 2 в = отп..
В регулирующем устройстве с импульсным выходным сигналом настроечными параметрами являются коэффициент передачи kр, постоянная времени интегрированияТи(или изодромаТиз) и дополнительно зона нечувствительности и зона возврата трёхпозиционного релейного элемента. Как будет показано ниже, от величины зоны возврата существенным образом зависит минимальная длительность включения ИМ. При работе регулирующего устройства в пульсирующем режиме сигналσ перед релейным элементом пульсирует в пределах зоны возврата. Выбор слишком малой зоны возврата и продолжительности включения ИМ приводит к повышенному износу последнего.
В регулирующем устройстве с релейно-импульсным выходным сигналом, реализующем закон ПИ-регулирования, входное устройство представляет собой измеритель рассогласования ε, а обратная связь реализована в виде апериодического звена с передаточной функцией
![]()
обычно это RC-цепь с переключаемыми постоянными времени при зарядеТзи разрядеТр.
Р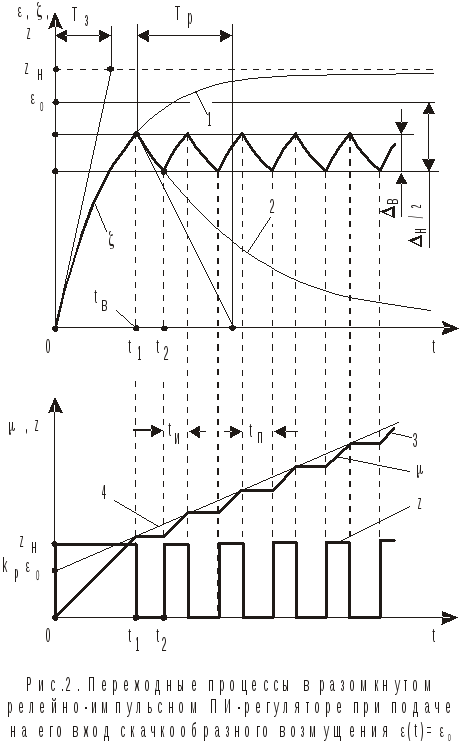 ассмотрим
работу регулятора вразомкнутойАСР. При поступлении на вход регулятора
постоянного сигнала рассогласова-ния ε0
н
/ 2релейный элемент срабатывает и
включает ИМ, который начинает вращаться
с постоянной скоростью, перемещая
регулирующий орган в сторону уменьшения
рассогласования. Одно-временно сигналzили его часть zнподаётся на устройство обратной связи.
Так как устройство обратной связи
является аперио-дическим звеном, при
поступлении на его вход постоянного
напряже-нияUвх
=
zн на его выходе появится выходное
напряжениеζ
возрастающее по экспоненте 1 (рис.
2). Это напряжениеζнаправлено
встречно напряжению входного сигнала
ε0, вследствие чего
результирующее напряжениеσ = ε0
– ζ, поступающее на вход релейного
элемента, начнёт уменьшаться.
ассмотрим
работу регулятора вразомкнутойАСР. При поступлении на вход регулятора
постоянного сигнала рассогласова-ния ε0
н
/ 2релейный элемент срабатывает и
включает ИМ, который начинает вращаться
с постоянной скоростью, перемещая
регулирующий орган в сторону уменьшения
рассогласования. Одно-временно сигналzили его часть zнподаётся на устройство обратной связи.
Так как устройство обратной связи
является аперио-дическим звеном, при
поступлении на его вход постоянного
напряже-нияUвх
=
zн на его выходе появится выходное
напряжениеζ
возрастающее по экспоненте 1 (рис.
2). Это напряжениеζнаправлено
встречно напряжению входного сигнала
ε0, вследствие чего
результирующее напряжениеσ = ε0
– ζ, поступающее на вход релейного
элемента, начнёт уменьшаться.
При уменьшении σдо значенияσ = ε0 – ζ = отпрелейный элемент выключится (момент времениt1), сигналzнна входе пускового устройства ИМ станет равным нулю, ИМ остановится. Напряжение на входе канала обратной связи также станет равным нулю. С этого момента напряжение на выходе канала обратной связи ζстанет уменьшаться по экспоненте 2, напряжениеσстанет возрастать, и приσ н / 2(момент времениt2) релейный элемент вновь сработает, ИМ включится, и на вход канала обратной связи поступит сигналzн. Напряжениеζна выходе канала обратной связи вновь станет возрастать по экспоненте, повторяющей ход экспоненты 1. Далее процессы включения и выключения (автоколебательный режим) будут повторяться. График перемещения выходного элемента ИМ(t)имеет вид ломаной линии 3, которая может быть приближённо заменена прямой 4.
Сравнивая линеаризованный закон изменения (t)(прямая 4) с идеальным законом ПИ-регулирования, можно утверждать, что релейно-импульсный ПИ-регулятор с ИМ постоянной скорости со структурой, показанной на рис.1,приближённореализует закон ПИ-регулирования. Пропорциональная составляющая закона ПИ-регулирования приближённо реализуется при измененииεза счёт начального быстрого перемещения в течение времениtв(время первого включения), а интегральная – за счёт последующего автоколебательного режима работы релейного элемента, охваченного отрицательной обратной связью.
Для обеспечения независимой настройки продолжительности импульсов tии паузtпс помощью специального автоматического переключателя в цепи обратной связи можно переключать постоянные времени при зарядеТзи разрядеТр.