

Глава 3. Уравнения движения электропривода
Наиболее
удобным методом составления уравнения
движения механической части привода
являются уравнения движения Лагранжа
второго рода. При этом предполагается,
что движение механической части
исследуется в системе обобщенных
координат, в качестве которых должны
быть приняты независимые параметры,
определяющие положения механизма.
Такими параметрами являются углы
поворота вращающихся вокруг неподвижных
осей дискретных инерционных элементов
![]() и их линейные перемещения
и их линейные перемещения
![]() (рис. 3.1).
(рис. 3.1).
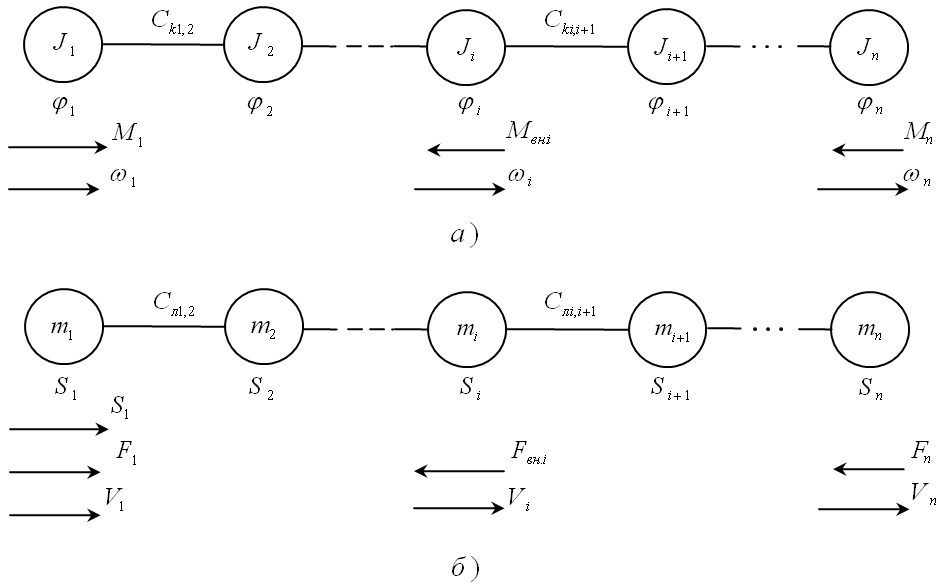
Рис. 3.1 Расчетные схемы механической части (а – для вращающихся элементов, б – для поступательно-движущихся элементов)
Уравнения Лагранжа второго рода
![]() , (3.1)
, (3.1)
где
![]() – кинетическая энергия систем;
– кинетическая энергия систем;
![]() –потенциальная
энергия системы;
–потенциальная
энергия системы;
![]() –работа
сил рассеяния (диссипативная функция
Релея);
–работа
сил рассеяния (диссипативная функция
Релея);
![]() –обобщенная
координата;
–обобщенная
координата;
![]() –обобщенная
скорость;
–обобщенная
скорость;
![]() –обобщенная
внешняя сила, соответствующая обобщенной
координате.
–обобщенная
внешняя сила, соответствующая обобщенной
координате.
При
вращательном движении
![]() ,
,
![]() ;
;
![]() при
поступательном движении
при
поступательном движении
![]() ,
,
![]() ,
,
![]() .
.
Число уравнений Лагранжа второго рода для системы равно числу дискретных инерционных элементов, т.е. числу степеней свободы механизма.
Для
механической системы, содержащей
![]() инерционных и
инерционных и
![]() упругих элементов:
упругих элементов:
![]() или
или
![]() ; (3.2)
; (3.2)
![]() или
или
![]() ; (3.3)
; (3.3)
![]() или
или
![]() . (3.4)
. (3.4)
Моменты (силы), входящие в левую часть уравнения Лагранжа (1) и действующие на 1-й инерционный элемент системы, определяются как:
1) инерционные
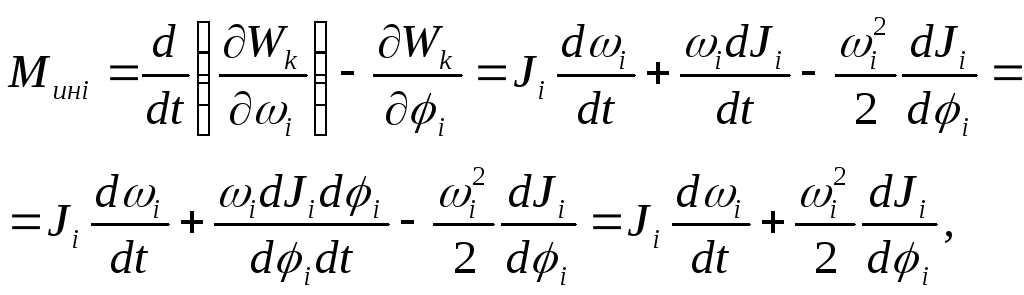 (3.5)
(3.5)
где
![]() ;
;
2) потенциальные
![]() ; (3.6)
; (3.6)
![]() . (3.7)
. (3.7)
3) диссипативные
![]() ; (3.8)
; (3.8)
![]() . (3.9)
. (3.9)
Для
![]() (для
первой массы)
(для
первой массы)
![]() . (3.10)
. (3.10)
Производная (момент)
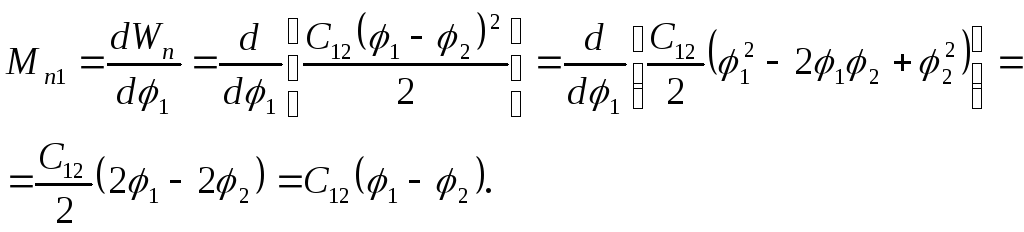 (3.11)
(3.11)
Для
![]()
![]() . (3.12)
. (3.12)
Производная (момент)
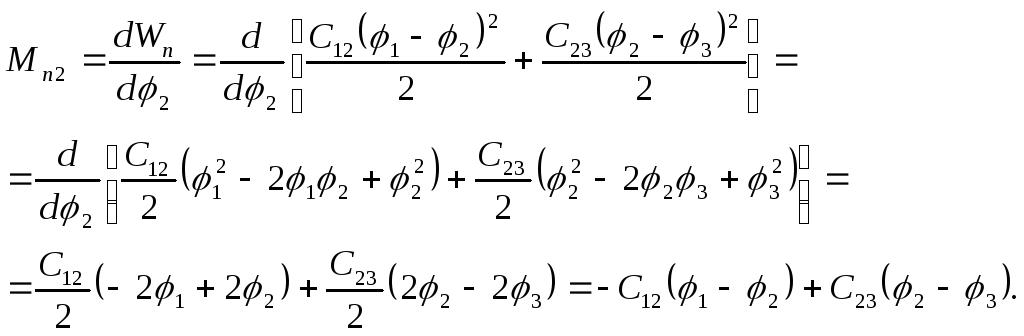 (3.13)
(3.13)
В соответствии с уравнением Лагранжа (1) для любого i-го звена может быть записано уравнение движения
![]() ; (3.14)
; (3.14)
![]() , (3.15)
, (3.15)
где
![]() ,
,![]() – суммарный внешний момент (сила),
действующий наi-е
звено.
– суммарный внешний момент (сила),
действующий наi-е
звено.
В
тех случаях, когда момент инерции (масса)
звена не зависит от его положения,
![]() ,
получим
,
получим
![]() ; (3.16)
; (3.16)
![]() , (3.17)
, (3.17)
где
![]() – угловое и линейное ускорение.
– угловое и линейное ускорение.
Диссипативные силы в упругих связях, обусловленные силами вязкого трения существенно меньше потенциальных сил, в связи с чем при исследовании законов движения электроприводов механизмов в первом приближении их можно не учитывать.
С учетом указанных допущений уравнения движения в случае трехмассовой системы имеют следующий вид
![]()

![]()
 (3.18)
(3.18)
![]()
Для двухмассовой системы
![]()

![]()
(3.19)
С
учетом, что момент упругой связи
![]() уравнения (3.19) запишутся в следующем
виде
уравнения (3.19) запишутся в следующем
виде

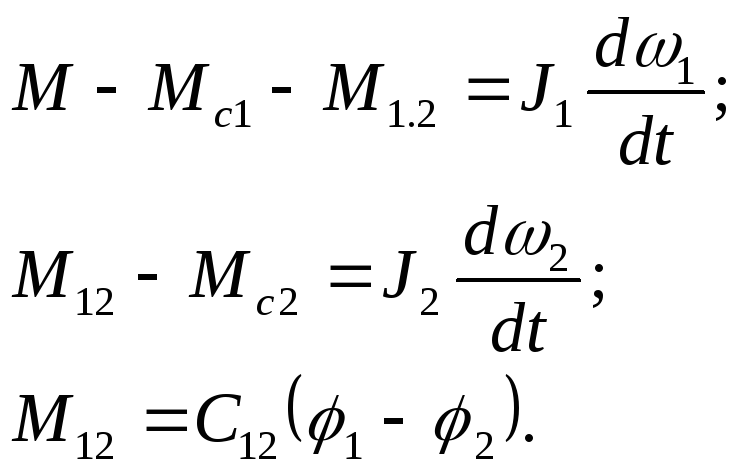 (3.20)
(3.20)
Для
одномассовой абсолютно жесткой системы
на основании (3.5) при
![]() можно записать уравнение движения
можно записать уравнение движения
![]() , (3.21)
, (3.21)
а
при
![]()
![]() . (3.22)
. (3.22)
Глава 4. Механическая часть электропривода как объект управления
Двухмассовая
упругая система (рис. 2.2, б) является
основным объектом при инженерных
исследованиях динамических процессов
с учетом упругих связей, в которой
коэффициентом пропорциональности
![]() учитывается момент внутреннего вязкого
трения (диссипативные силы)
учитывается момент внутреннего вязкого
трения (диссипативные силы)
![]() . (4.1)
. (4.1)
Структурная
схема двухмассовой упругой Э.М.С.
представлена на рис. 4.1, которая составлена
на основании системы дифференциальных
уравнений в операторном виде, где
![]()
![]()

![]() (4.2)
(4.2)
![]()
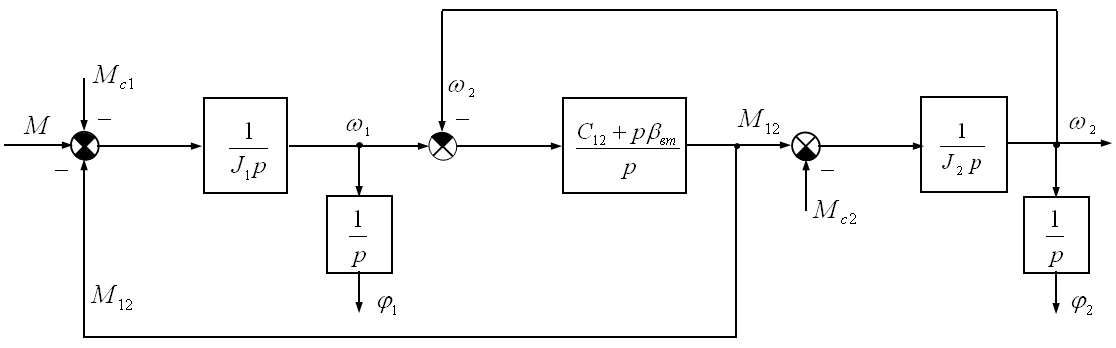
Рис. 4.1. Структурная схема двухмассовой упругой Э. М. С.
В
рассматриваемой структурной схеме
управляющем воздействием является
электромагнитный момент двигателя М,
а возмущающими воздействиями – моменты
сопротивлений
![]() .
В качестве выходных координат можно
рассматривать скорости
.
В качестве выходных координат можно
рассматривать скорости![]() ,
упругий момент
,
упругий момент![]() и углы перемещения инерционных масс
и углы перемещения инерционных масс![]()
![]() . (4.3)
. (4.3)
Структурная
схема двухмассовой системы электропривода
(рис.4.1) позволяет получить передаточные
функции по управляющему и возмущающим
воздействиям для анализа поведения
выходных координат
![]() ,
,![]() .
.
По
управляющему воздействию при
![]() после структурных преобразований в
схеме (рис.4.1) передаточная функция по
выходной переменной
после структурных преобразований в
схеме (рис.4.1) передаточная функция по
выходной переменной![]() определяется
следующим образом (см. рис. 4.2)
определяется
следующим образом (см. рис. 4.2)

Рис.
4.2. Преобразованная структурная схема
по
![]() двухмассовой системы при
двухмассовой системы при![]()
 ; (4.4)
; (4.4)
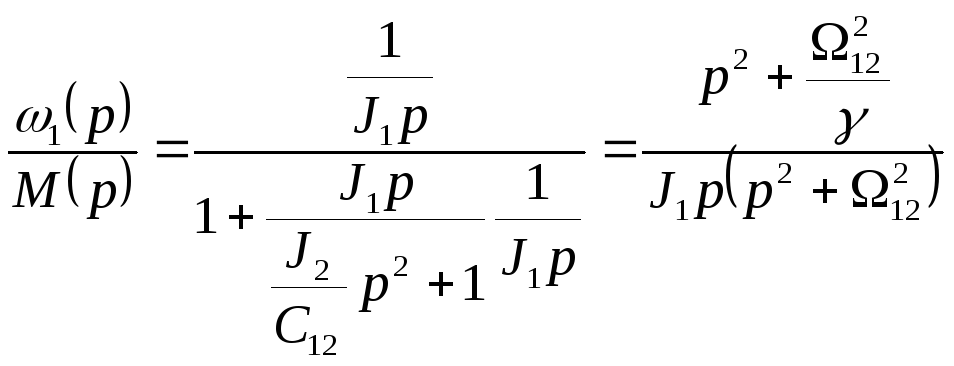 , (4.5)
, (4.5)
где
 – частота свободных колебаний двухмассовой
упругой системы;
– частота свободных колебаний двухмассовой
упругой системы;
![]() .
.
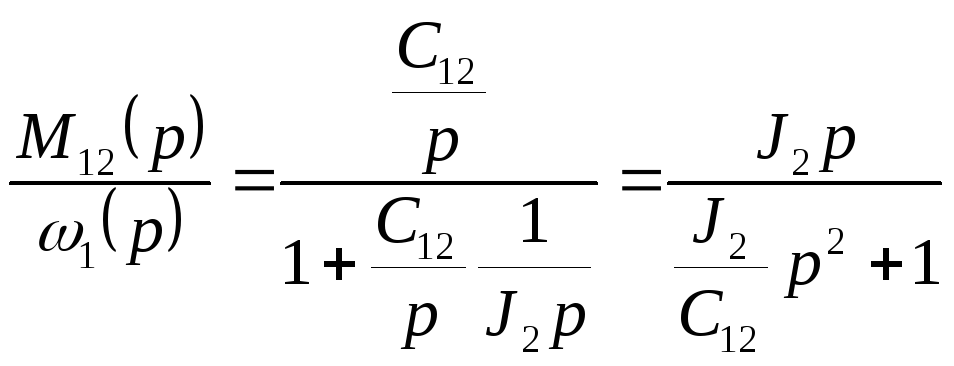
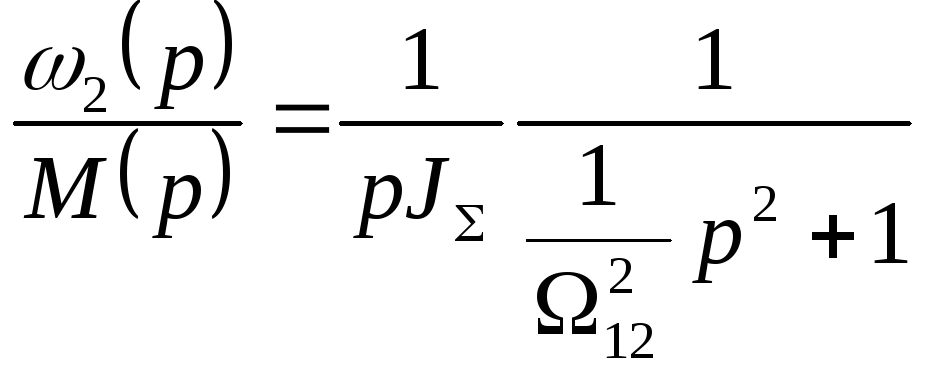
Передаточная
функция по выходной переменной
![]() после структурных преобразований схемы
(рис. 4.3) при
после структурных преобразований схемы
(рис. 4.3) при![]() определяется следующим образом
определяется следующим образом
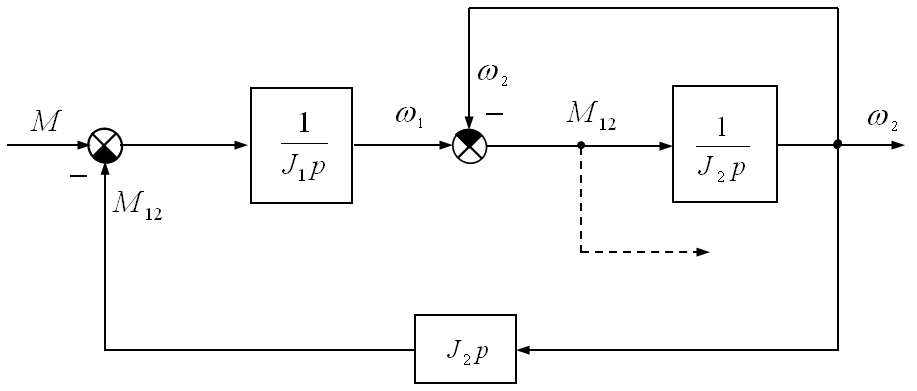
Рис.
4.3. Преобразованная структурная схема
по
![]() двухмассовой системы при
двухмассовой системы при![]()
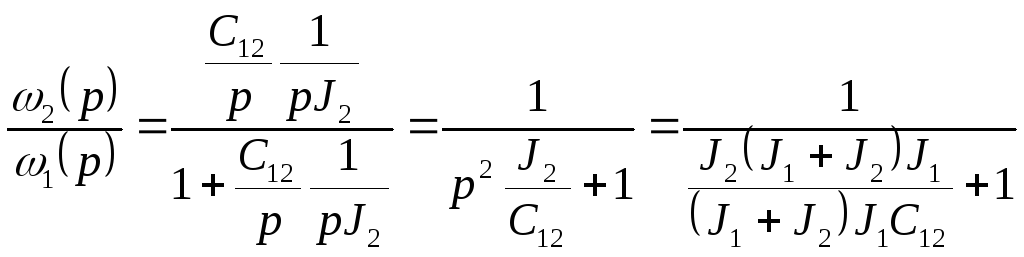 .
.
С учетом
![]() ;
;
![]() ,
,
получим
 . (4.6)
. (4.6)
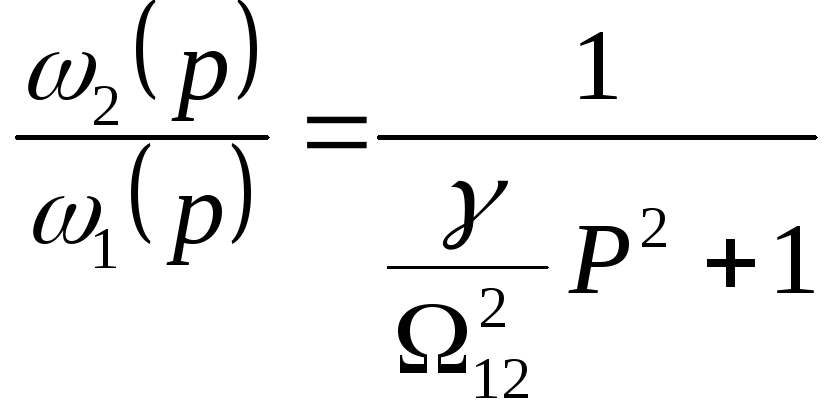
Уравнение (4.5) представим в следующем виде
 . (4.7)
. (4.7)
Тогда
имеем структурную схему по выходной
координате
![]() (см. рис. 4.4)
(см. рис. 4.4)

Рис.
4.4 Структурная схема по выходной
координате
![]()
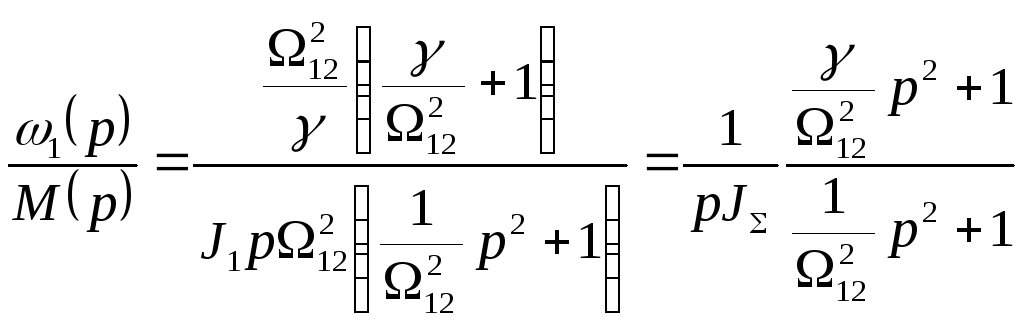
Передаточная функция
 , (4.8)
, (4.8)
т.е. соответствует двум последовательно соединенным звеньям интегрирующего и колебательного.
Передаточная
функция по выходной координате
![]() в соответствии со структурными
преобразованиями в схеме рис. 4.1. при
в соответствии со структурными
преобразованиями в схеме рис. 4.1. при![]() может
быть определена следующим образом.
может
быть определена следующим образом.
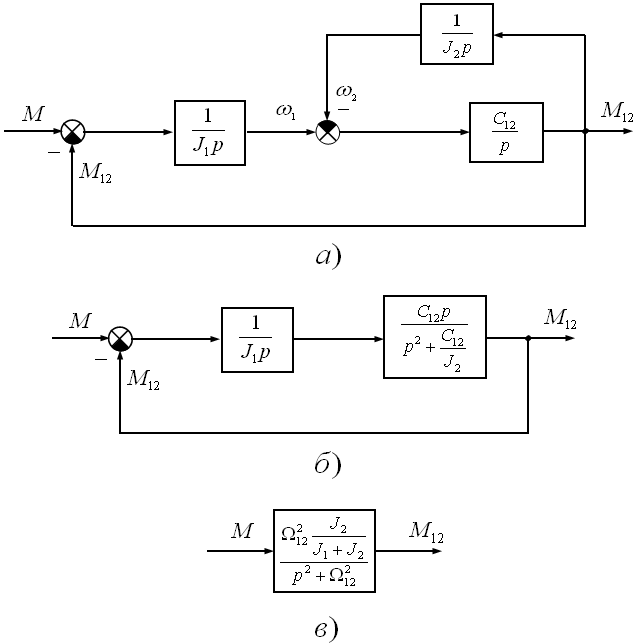
Рис.
4.5. Структурные преобразования для
получения передаточной функции
![]()
Для схемы рис. 4.5, а передаточная функция
 , (4.9)
, (4.9)
а для схемы рис.4.5, б передаточная функция
 . (4.10)
. (4.10)
После соответствующих преобразований в формуле 4.10 получим
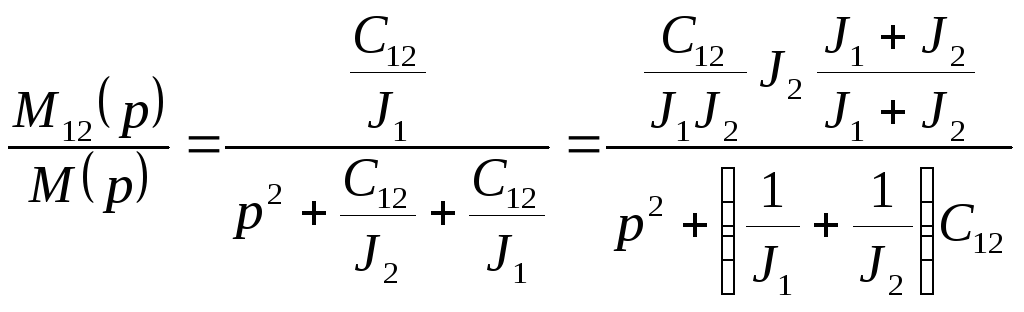
и окончательно
 . (4.11)
. (4.11)
Как
видно из полученных передаточных функций
![]() ,
,![]() ,
,![]() характеристическое уравнение системы
(знаменатель в формулах 4.5, 4.6, 4.11),
описывающее движение двухмассовой
системы при
характеристическое уравнение системы
(знаменатель в формулах 4.5, 4.6, 4.11),
описывающее движение двухмассовой
системы при![]()
![]() , (4.12)
, (4.12)
а корни
![]() . (4.13)
. (4.13)
Поведение
такой системы рассмотрим на примере
приложения управляющего воздействия
в виде электромагнитного момента М,
изменяющегося во времени по гармоническому
сигналу с переменной частотой
![]() .
Амплитудно-частотные и фазочастотные
характеристики такой системы, полученных
при помощи (4.8), имеют вид
.
Амплитудно-частотные и фазочастотные
характеристики такой системы, полученных
при помощи (4.8), имеют вид
 ; (4.14)
; (4.14)
 . (4.15)
. (4.15)
Анализ
формул 4.14, 4.15 показывает, что при
![]() и
и![]() амплитуды стремятся к бесконечности,
а фаза
амплитуды стремятся к бесконечности,
а фаза![]() при
при![]() скачком изменяется на
скачком изменяется на![]() (
(![]() ).
Зависимость
).
Зависимость![]() ,
,![]() представлены на рис. 4.6, из которого
следует, что при
представлены на рис. 4.6, из которого
следует, что при![]() наступает механический резонанс,
наступает механический резонанс,![]() претерпевает разрыв, амплитуда колебаний
возрастает до бесконечности.
претерпевает разрыв, амплитуда колебаний
возрастает до бесконечности.
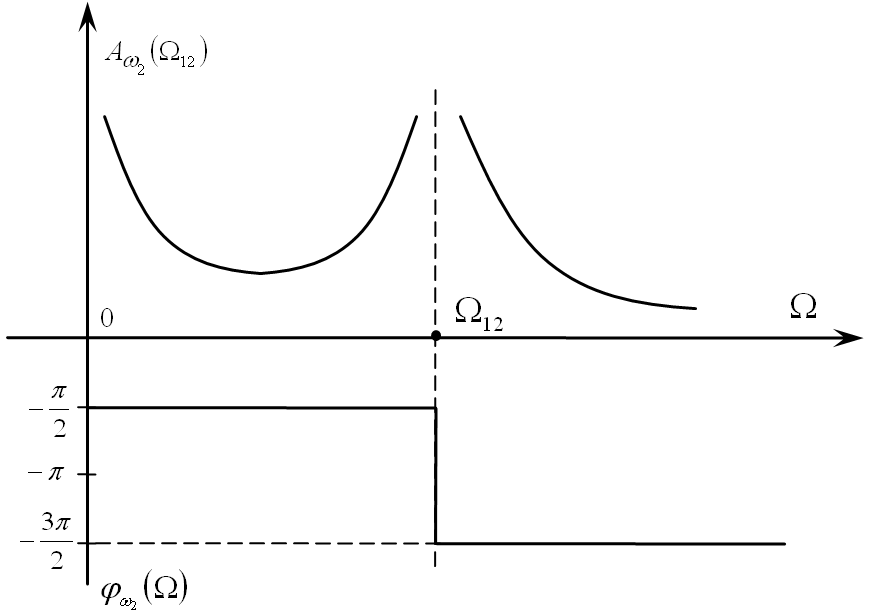
Рис. 4.6 Амплитудно-частотная АЧX и фазовая частотная ФЧХ характеристики двухмассовой системы
В реальных механических системах происходит ограничение резонансных амплитуд колебаний силами, обуславливающими рассеяние энергии механических колебаний. К внешним силам относятся трение колеблющейся системы о среду, к внутренним – диссипативные силы в упругих элементах (силы вязкого трения).
Система уравнений, описывающая движение двухмассовой системы с учетом сил вязкого трения (коэффициент βв.т= β12 ) представлена в виде (4.2), структурная схема на рис. 4.1.
Произведя структурные преобразования схемы рис. 1.2, получим передаточную функцию по управляющему воздействию
![]() .
(4.16)
.
(4.16)
Если обозначить
![]() ;
;
![]() ,
,
то уравнение (4.16) запишется в виде
![]() . (4.17)
. (4.17)
Корни характеристического равнения системы
![]() . (4.18)
. (4.18)
Выражение
(4.18) показывает, что силы вязкого терния
вносят в систему затухание и двухмассовая
упругая система приобретает свойства
колебательного звена с коэффициентом
затухания
![]() и частотой колебаний
и частотой колебаний![]() .
Так как
.
Так как![]() ,
,![]() .
.
Логарифмический
декремент затухания
![]() ,
представляющий собой отношения двух
последующих амплитуд колебаний
,
представляющий собой отношения двух
последующих амплитуд колебаний![]() (рис. 4.27), характеризует рассеяние энергии
в упругом звене. Он может быть определен
по известной величине действительной
и мнимой части корней характеристического
уравнения (4.18).
(рис. 4.27), характеризует рассеяние энергии
в упругом звене. Он может быть определен
по известной величине действительной
и мнимой части корней характеристического
уравнения (4.18).
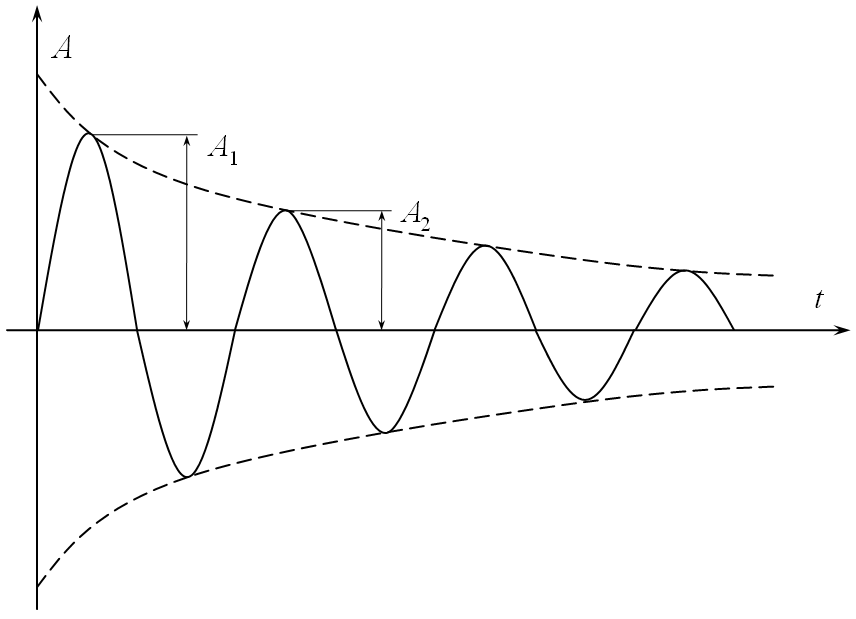
Рис. 4.7. К определению логарифмического декремента затухания
![]() . (4.19)
. (4.19)
Исследование
показывают, что естественное механическое
демпфирование обеспечивает значение
![]() .
При таких значениях
.
При таких значениях![]() ,
несмотря на ограничение амплитуд
резонансных колебаний, резонансный пик
остается по-прежнему большим и колебания
в зоне резонанса увеличиваются в (10-30)
раз.
,
несмотря на ограничение амплитуд
резонансных колебаний, резонансный пик
остается по-прежнему большим и колебания
в зоне резонанса увеличиваются в (10-30)
раз.
Выражение АЧХ для двухмассовой системы с учетом демпфирования принимает вид
 . (4.20)
. (4.20)
На
рис. 4.8 приводятся зависимости резонансного
коэффициента усиления системы от
частоты, рассчитанные в соответствии
с (4.20) для различных значений
![]() .
.
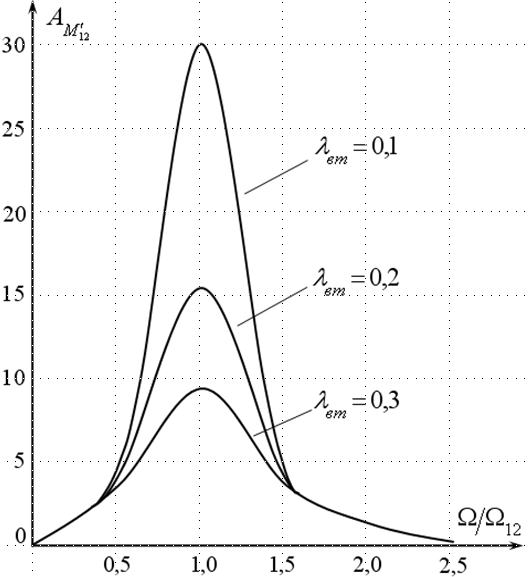
Рис. 4.8. Зависимости резонансного коэффициента усиления системы от частоты