


18 Порядок выбора автоматического регулятора и определение его настроечных параметров.
При выборе типа руководствуются следующим:
1.) динамическими свойствами объекта регулирования (ОР)(самовыравнивание, емкость, время запаздывания).
2.) величиной и характером возмущающего воздействия.
3.) требованиями, предъявляемыми к качеству регулирования.
Один и тот же переходный процесс можно получить с помощью различных типов АР. Следует стремится к более простому:
И→П→ПИ→ПР→ПИР.
y 
СП регулир.
Слюбым
 t
t
Т.к. качество регулирования это вполне определяемые числовые параметры, то наряду с выбором типа АР определяют его настроечные параметры.
3 способа:
1.) экспериментальный путь – надежный, но трудоемкий способ, в ряде случаев ограниченный невозможностью больших отклонений регулир. величины.
2.) аналитический путь - должно быть известно уравнение динамики и его коэффициенты. Подставляя различные законы регулирования и значения насроечных параметров, решают эти уравнения.
3.) с помощью монограмм и эмпирических формул – определяют настроечные параметры для заданного типа переходного процесса для ОР 1- го порядка. ОР более высокого порядка приблизительно равен рассмотр. как ОР 1-го порядка с временем запаздывания tз, кот. Отражается в правой части ур-ния:
|
|
|
|
|
T |
dy(t) |
+ y(t) = kx(t −tз ) |
|
|
|
|
|
|||
|
|
|
|
|
|||
|
tз |
|
|||||
|
|
|
|||||
|
|
|
dt |
|
|||
|
|
|
|
|
|
|
|
1.параметра на заданном уровне
19 Деформационные манометры. Принцип действия, области применения.
В этих приборах измеряемоедавление или разрежение уравновешивается силами упругого противодействия различных чувствительных элементов, деформация которых, пропорциональная измеряемому параметру, через рычаги передается на стрелку или перо прибора. При снятии давления чувствительный элемент возвращается в первоначальное положение под воздействием упругой деформации. Деформационные манометры нашли широкое применение в промышленности, что обусловлено простотой и надежностью конструкции, наглядностью показаний, малыми габаритами, высокой точностью и широкими пределами измерения. В качестве измерительных элементов деформационных манометров и измерительных преобразователей давления, разрежения и перепада давлений используют одновитковую трубчатую пружину (рис. 3а), сильфон (рис. 3б), мембранную коробку (рис. 3в), многовитковую трубчатую пружину (рис. 3г), вялую мембрану (рис. 3д), жесткую мембрану (рис. 3е)
.
В трубчатопружинном манометре с одновитковой трубчатой пружиной (рис. 4), получившем наибольшее распространение, чувствительным элементом является трубчатая пружина 2, представляющая собой полую трубку овального или эллиптического сечения, согнутую по дуге окружности
.Маленькая ось эллипса трубки располо-жена параллельно, а большая – перпендикулярно плоскости чертежа. Один конец трубчатой пружины жестко соединен с держателем 1, укрепленным винтами в круглом корпусе 3 манометра. Держатель имеет резьбовой ниппель, предназначенный для крепления при-бора на трубопроводе или аппарате, в котором измеряется давление. Свободный конец пружины поводком связан с передаточным механизмом 7 , состоящим из зубчатого сектора и сцепленной с ним
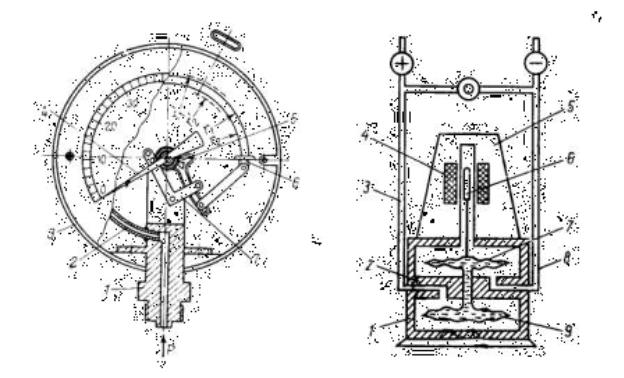
шестеренки,на оськоторой насажена стрелка 4.Для устранения мертвого хода стрелки, вызванного люфтами в соединениях, пере-даточный механизм снабжен упругим спиральным волоском 5. Внутренний конец волоска крепится на оси стрелки, а внешний – на неподвижной плате механизма. Волосок постоянно прижимает шестеренки со стрелкой в направлении, противоположном перемещению звеньев механизма под действием давления, что устраняет влияние люфтов в соединениях, и стрелка прибора начинает двигаться одновременно с отклонением чувствительного элемента.
20 Влияние Д- составляющей закона регулирования на качество переходных процессов АСР ( на примере ПДрегулятора).
В математике нахождение скорости изменения некоторой переменной величины называется дифференцированием. Поэтому такой закон регулирования — пропорционально-дифференциальный (сокращенно: ПД-
закон регулирования и ПДрегулятор). Слагаемое к Ах называется пропорциональной или П-составляющей, а слагаемое к Тя Ах' — дифференциальной или Д-составляющей. Коэффициент Гд в дифференциальной составляющей всегда положителен и имеет размерность времени. Поэтому он получил название времени дифференцирования или времени предварения. Если рассогласование Ах не изменяется, то его скорость Ax' равнанулю и, как видно из сравнения формул(3.3)и (3.4), в этом частном случае ПД-закон регулирования действует так же, как П-закон. Следовательно, действие Д-составляющей проявляется лишь в неустановившемся состоянии АСР, пока рассогласование изменяется во
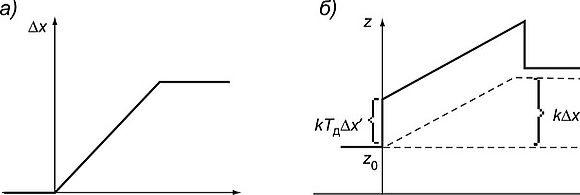
времени.ВПД-регуляторевсравнениисП-регуляторомдобавляетсяещеодин настроечный параметр — время предварения Тг Переходный процесс в П- регуляторе показан на рис. 3.9, в. Из сравнения графиков ПД-закона регулирования и П-закона видно, что первый характеризуется наличием импульса, возникающего в момент скачка рассогласования. Появление этого импульса объясняется тем, что скорость Ax' в момент скачка рассогласования бесконечно велика. Поэтому слагаемое к Та Ax' в формуле (3.4), а значит, и выходной сигнал регулятора г в этот момент достигают очень больших значений. Чтобы нагляднее увидеть эффект предварения в ПД-регуляторе, рассмотрим его реакцию не на скачкообразное, а на постепенное изменение рассогласования с постоянной скоростью (рис. 3.10). Пунктиром на этом графике показана П-составляющая закона регулирования, изменение которой подобно изменению рассогласования. Дифференциальная составляющая увеличивает выходной сигнал регулятора г в течение всего времени, пока увеличивается рассогласование. Чем быстрее оно изменяется, тем больше увеличениевыходногосигналаПД-регуляторапосравнениюсП-регулятором. В случае уменьшения рассогласования выходной сигнал регулятора уменьшался бы. Такое форсированное изменение выходного сигнала ПДрегулятора позволяет эффективнее компенсировать действие возмущений на объекты с запаздыванием.
21.Расходомеры постоянного перепада давления. Индукционные расходомеры: устройство, принцип действия, область применения.
Расходомеры постоянного перепада давления: ротаметры, поплавковые и поршневые. Принцип действия основан на зависимости от расхода в-ва вертикального перемещения тела – поплавка, находящегося в потоке и изменяющего при этом площадь проходного отверстия прибора т. о., что перепад давления по обе стороны поплавка остается постоянным.
Ротаметры. Применяются для измерения расходов однородных потоков чистых и слабозагрязненных жидкостей и газов, протекающих по трубопроводам и неподверженных значительным колебаниям (виноделье, спирт и др.).