

Строительные и дорожные машины_ Шепелина_учебное пособие
.pdf6. Толщина срезаемого слоя грунта
h = qк·kн ., м
Hк·bк·kразр.
где qк - вместимость ковша, м3;
kн – коэффициент наполнения грунта, kн = (0,8÷1,2); Нк- высота копания, м; кразр – коэффициент разрыхления грунта, кр = (1,1 ÷ 1,3).
Рисунок 1.8 Расчетная схема экскаватора прямая лопата 7. Сопротивление грунта копанию
Pк = kр·h·bк
где kр - удельное сопротивление грунта копанию, МПа; h – толщина срезаемого слоя грунта, м;
bк - ширина ковша, м.
8. Плечи действующих сил а) плечо действия усилия в подъемном канате
lп = 0,5·lс·cos45о , м,
где lс – длина стрелы, м
б) плечо действия веса ковша с грунтом
lкг = 0,9·lр + 0,5·lк ,м,
где lр – длина рукояти, м, lк – длина ковша, м,
в) плечо действия веса рукояти
lр = 0,4· lр , м,
где lр – длина рукояти, м,
г) плечо действия силы сопротивления копанию lк = 0,9·lр + lк ,м,
где lр – длина рукояти, м;
30
lк – длина ковша, м.
9. Усилие в подъемном канате
Sп = Pк·lк + Gк.г.·lк.г + Gр·lр / lп ,Н
Вес ковша с грунтом, Н
Gк.г = Gк. + G.г
где Gк – вес металлоконструкции ковша , Н; Gг – вес грунта находящегося в ковше, Н.
Вес металлоконструкции ковша
Gк. = Мк·g , Н,
где Мк – масса ковша, кг;
g – ускорение свободного падения, g = 9,81 м/с2.
Вес грунта находящегося в ковше
G.г = qк·γ0·kн·g , Н,
где qк – вместимость ковша, м3;
γ0 - объемная масса грунта, кг/м3;
kн – коэффициент наполнения грунта, kн = (0,8 ÷ 1,2).
10. Усилие в канате грузоподъемного механизма
Sп.к. = Sп / iп·ηп ,Н,
где Sп - усилие в подъемном канате, Н, iп – кратность полиспаста, i = 2, ηп- к.п.д. полиспаста, ηп = 0,9,
11. Мощность необходимая для подъема ковша с грунтом
Nп = Sп.к.·vп /. 1000·ηп , Н,
где Sп.к .- усилие в грузоподъемном канате, Н,
vп – скорость подъема ковша, м/с , vп = (0,5 ÷ 0,7) м/с, ηм - к.п.д. подъемного механизма, ηм = 0,85.
12. Напорное усилие в механизме Принимается в зависимости от усилия в подъемном механизме
Sн. = (0,5 ÷ 0,6) Sп.к.
13. Мощность напорного механизма
Nн = Sн..·vн /. 1000·ηн , Н,
где Sн - напорное усилие, н,
vн - скорость движения рукояти, vн = (0,1 ÷ 0,2) м/с, ηн – к.п.д. механизма напора, ηн = 0,85.
31
Производительность экскаватора, м3/ч
Пэ = 3600·qк·kн·kвр. / Tц·kразр.
где qк – вместимость ковша, м3;
kн – коэффициент наполнения грунта, kн = (0,8 ÷ 1,2);
kр – коэффициент использования экскаватора во времени, kвр. = (0,8 ÷ 0,85);
kразр – коэффициент разрыхления грунта, kр = (1,1 ÷ 1,35); Tц - длительность цикла, с.
Рекомендуемая литература
[1] стр.471-499, [10] стр.308-322, [15] стр.233-246, [27], [36], [37].
1.8Контрольные задания
1.Перечислите основные параметры экскаваторов.
2.Назовите области применения и поясните технологию ведения работ.
3.Назовите основные факторы, влияющие на эффективность работы.
4.Перечислите способы повышения производительности.
5.Опишите подробно рабочий процесс одноковшового экскаватора.
6.Перечислите основные марки машин.
4.Назовите виды многоцелевых рабочих органов экскаваторов.
5.Приведите примеры экскаваторов с постоянно установленными несколькими видами рабочего оборудования различного технологического назначения.
6.Приведите примеры экскаватора со сменными рабочими органами. Дайте схемы легкосъемных органов.
7.Приведите примеры технико-экономических и техникоэксплуатационных показателей. Очертите области использования показателей.
8.По какому показателю определяется энергетическая эффективность экскаваторов? Укажите область использования.
9.Назовите показатель оценки эффективности экскаваторов по совокупности энергетических и материальных затрат.
10.Дайте определение показателя эффективности по сокращению продолжительности рабочих операций экскаваторов. Приведите пример определения времени цикла и операции.
11.Определить основные параметры оборудования и мощности: Vп, Vн, Vвозв, Ро, Sп, Sн, Nп ,Nн, N, Mпов
32
Таблица 1.4
Варианты заданий для расчета экскаватора
вариант |
Категория грунта |
тип |
тип привода |
Вместимость ковшаq. м3 |
ширинамb, режущейкромки |
скорость перемещенияV с/м |
|
|
|
|
|
|
|||
|
|
экскаватора |
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
1 |
прямая |
Одномоторный |
0,1 |
0,5 |
8 |
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
2 |
обратная |
Шунтовый двигатель |
0,3 |
0,6 |
7,5 |
|
лопата |
|||||||
|
|||||||
|
|
|
|
|
|
||
3 |
3 |
драглайн |
ДВС с гидропреобразователем |
0,5 |
0,7 |
7 |
|
|
|||||||
|
|
|
|
|
|
|
|
4 |
4 |
прямая |
Одномоторный |
0,7 |
0,8 |
6,5 |
|
|
|||||||
|
|
|
|
|
|
|
|
5 |
1 |
обратная |
Шунтовый двигатель |
0,9 |
0,9 |
6 |
|
|
|||||||
лопата |
|
||||||
|
|
|
|
|
|
||
6 |
2 |
драглайн |
ДВС с гидропреобразователем |
0,6 |
0,6 |
6 |
|
|
|||||||
|
|
|
|
|
|
|
|
7 |
3 |
прямая |
Одномоторный |
1,3 |
1,1 |
5 |
|
|
|||||||
|
|
|
|
|
|
|
|
8 |
4 |
обратная |
Шунтовый двигатель |
1,5 |
1,2 |
4,5 |
|
лопата |
|||||||
|
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
9 |
1 |
драглайн |
ДВС с гидропреобразователем |
1,1 |
1 |
5,5 |
|
|
|||||||
|
|
|
|
|
|
|
|
10 |
2 |
прямая |
Одномоторный |
1,5 |
1,3 |
4 |
|
|
|||||||
|
|
|
|
|
|
|
|
11 |
3 |
обратная |
Шунтовый двигатель |
1,8 |
1,2 |
4 |
|
лопата |
|||||||
|
|||||||
|
|
|
|
|
|
||
12 |
4 |
драглайн |
ДВС с гидропреобразователем |
1,7 |
1,3 |
4 |
|
|
|||||||
|
|
|
|
|
|
|
|
13 |
1 |
прямая |
Одномоторный |
1,9 |
1,4 |
3,5 |
|
|
|||||||
|
|
|
|
|
|
|
|
14 |
2 |
обратная |
Шунтовый двигатель |
2,0 |
1,0 |
3,5 |
|
|
|||||||
лопата |
|
||||||
|
|
|
|
|
|
||
15 |
3 |
драглайн |
ДВС с гидропреобразователем |
2,0 |
1,3 |
3 |
|
|
|||||||
|
|
|
|
|
|
|
|
16 |
4 |
прямая |
Одномоторный |
2,0 |
1,4 |
3,5 |
|
|
|||||||
|
|
|
|
|
|
|
|
17 |
1 |
обратная |
Шунтовый двигатель |
2,1 |
1,5 |
3 |
|
лопата |
|||||||
|
|||||||
|
|
|
|
|
|
||
18 |
2 |
драглайн |
ДВС с гидропреобразователем |
2,3 |
1,6 |
2,5 |
|
|
|||||||
|
|
|
|
|
|
|
|
19 |
3 |
прямая |
Одномоторный |
2,2 |
1,5 |
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
20 |
4 |
обратная |
Шунтовый двигатель |
2,2 |
1,6 |
2 |
|
лопата |
|||||||
|
|||||||
|
|
|
|
|
|
33
2. ЭКСКАВАТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Экскаваторами непрерывного действия называют самоходные землеройные машины с активными рабочими органами, которые одновременно и непрерывно копают, транспортируют и разгружают грунт при движении всей машины. Благодаря принципу непрерывности рабочего процесса и использованию всего рабочего времени на экскавацию грунта эти экскаваторы по сравнению с одноковшовыми обеспечивают более высокую производительность и лучшие удельные показатели.
2.1 Классификация и основные части экскаваторов непрерывного действия
По характеру выдачи продукции непрерывным потоком многоковшовые экскаваторы относят к машинам непрерывного действия. Их характерной особенностью является более равномерная загрузка силовых установок во времени и более высокая производительность по сравнению с машинами цикличного действия. Обычно все ковши многоковшового экскаватора закрепляют на едином рабочем звене — роторе (роторные экскаваторы) или замкнутой цепи (цепные экскаваторы), располагая их с одинаковым шагом. Рабочий орган роторного экскаватора может быть и бесковшовым (фрезерные экскаваторы). В этом случае зубья закрепляют непосредственно на роторе (фрезе).
Фрезерные экскаваторы применяют для нарезания щелей при укладке кабелей связи, а также для подготовки прочных грунтов перед последующей разработкой другими средствами, например, путем сдвига расчлененных блоков грунта мощными бульдозерами. У цепных экскаваторов ковши могут быть заменены скребками (скребковые экскаваторы). Последние применяют для разработки узких траншей в слабых грунтах. В этом случае осыпание транспортируемого скребками грунта ограничивается боковыми стенками траншеи.
Многоковшовые экскаваторы оборудуют преимущественно гусеничными (траншейные, мелиоративные и карьерные роторные экскаваторы) или рельсо-колесными (цепные экскаваторы поперечного копания) ходовыми устройствами. В отдельных случаях для траншейных экскаваторов малой мощности применяют также пневмоколесный ход. Рельсо-колесные ходовые устройства обладают невысокой маневренностью, поэтому их применяют на стабильных по длине объектах значительной протяженности. По мере выработки забоя, после исчерпания маневренности рабочего оборудования рельсы перемещают на новую позицию.
34

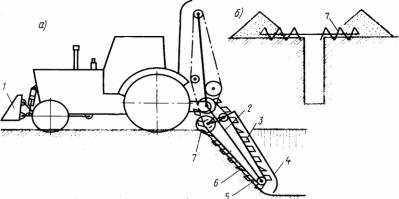
Траншейные экскаваторы. Траншейный экскаватор (рис. 2.1) состоит из тягача, рабочего органа и отвалообразователя. Тягач обеспечивает экскаватору поступательное перемещение как в режиме экскавации, так и при его перебазировании. Его оборудуют ходовым устройством 5, силовой установкой 7 с передаточными механизмами и системой управления, кабиной машиниста 6. Тягач изготовляют преимущественно на базе тракторных узлов. Для снижения удельных давлений на грунт его ходовые устройства удлиняют по сравнению с тракторными, а для обеспечения продольной устойчивости наиболее тяжелые агрегаты, например, силовую установку располагают в передней части тягача. При необходимости там же устанавливают дополнительный противовес. На тягаче также монтируют раму 8 для его соединения с рабочим органом. Рабочий орган выполняют в двух вариантах: в виде колеса (ротора) 2 с расположенными по его периферии ковшами 3 или в виде ковшовой цепи 26.
Рисунок 2.1 Траншейные экскаваторы: а) роторного, б) цепного типа;
1− ковш; 2−колесо; 3, 26− ковшовые цепи; 4− направляющее; 5− движитель; 6− кабина машиниста; 7− силовая установка; 8− тягач;
9, 10гидроцилиндры; 11− полиспаст; 12− стойка; 13−канат; 14− отвалообразователь; 15, 19 − ролики; 16− боковая балка; 17− рама;
18− защитный кожух; 19− направляющие ролики; 20− скользящая рама; 21−транспортер; 22−натяжное колесо; 23− ковшовая рама;
24− поддерживающий ролик; 25− ведомый ролик; 27− опорный ролик; 28 – тяговый брус; 29− цилиндрический щит; 30− зубья; 31−палец натяжного
колеса; 32−тяговая цепь; 3− качающейся балансир; 34− криволинейный конвейер
35
Соответственно различают роторные и цепные траншейные экскаваторы. Рабочий орган роторного экскаватора вращается в плоскости движения последнего, опираясь на раму 17 (рис. 2.1, а) через опорные 15 и направляющие 19 ролики.
Траншейные экскаваторы оборудуют автономной силовой установкой с двигателем внутреннего сгорания, обычно дизелем. В зависимости от способа передачи энергии основным рабочим механизмам различают экскаваторы с механической, электрической, гидравлической и комбинированной передачами. Первый вид передач характерен для машин малой и средней мощности (до 120 кВт), а второй и последний − для машин большой мощности.
Для отрывки неглубоких и узких траншей при небольших объемах работ на одной строительной площадке и связанной с этим частой перебазировкой землеройных машин применяют цепные экскаваторы на базе пневмоколесных тракторов (рис. 2.2)
Рисунок 2.2 Скребковый экскаватор для разработки узких траншей:
а — конструктивная схема рабочего оборудования; б — схема работы шнеков; 1− отвал; 2− рама; 3− скребок; 4− зачистной башмак; 5− тяговая цепь; 6− резец; 7− шнек
Рабочий орган этих машин, навешенный на трактор в его задней части, оснащают чередующимися резцами 6 и скребками 3 соответственно для отделения грунта от массива и его выноса на поверхность. Вынесенный на поверхность грунт отодвигают в стороны от траншеи шнеками 7, которые приводятся в движение от тяговой цепи 5. Просыпавшийся на дно траншеи грунт подгребают к скребкам зачистным башмаком 4, укрепленным на раме рабочего органа 2.
36
2.2 Производительность экскаваторов непрерывного действия.
Для ЭНД с ковшовым рабочим органом эксплуатационная производительность (м3/ч) вычисляется по формуле:
|
П |
|
П |
|
k |
|
|
П |
|
|
kн |
k |
|
3600 q n |
kн |
k |
|
, |
|
(2.1) |
|||||
э |
т |
в |
0 |
|
|
в |
|
в |
|||||||||||||||||
|
|
|
|
|
|
|
|
k p |
|
|
|
|
k p |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
где kв – коэффициент использования машины по времени: |
||||||||||||||||||||||
непрерывного действия kв = 0,85 ÷ 0,9; |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
kн – коэффициент наполнения ковша; |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
kр – коэффициент разрыхления грунта; |
|
|
|
|
|
|||||||||||||||||
|
|
|
q – объём ковша; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
n – число разгрузок ковшей в ед. времени |
|
|
|
|
|
|||||||||||||||||
|
|
|
n = v/l, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
где v и l – скорость (м/с) и шаг ковшей (м). |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Для многоковшовых цепных экскаваторов принимают n = 0,33 ÷ |
||||||||||||||||||||||
0,66 c-1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
для роторных карьерных – 1 – 2 c-1, |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
для роторных траншейных – 2,7 – 2,9 c-1. |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
грунт |
|
|
|
|
I |
|
|
|
|
|
|
|
II |
|
|
|
III |
|
|
|
IV |
|
||
|
Kн |
|
|
0,9–1,2 |
|
|
|
|
|
0,8–1,1 |
|
|
0,75–1,0 |
|
0,9–0,9 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Kр |
|
|
1,08–1,17 |
|
|
|
|
1,14–1,28 |
|
1,24–1,3 |
|
1,26–1,32 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Для скребковых траншеекопателей, транспортирующих грунт в |
||||||||||||||||||||||
виде призмы волочения, теоретическая производительность |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
П0 |
3600 bc hc vц ε |
, |
|
|
|
|
|
|
(2.2) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
где bc, hc – ширина и высота транспортного скребка, м; |
||||||||||||||||||||||
|
|
|
vц – скорость скребковой цепи, м/с; vц = 1,5– 2,5 м/с; |
|
|
||||||||||||||||||||
|
|
|
ε – |
|
коэффициент, |
учитывающий |
|
степень |
заполнения |
||||||||||||||||
межскребкового пространства грунтом. При ε = 0,5 нерационально используется выносная способность скребков, то есть теоретическая
производительность снижается более чем в 2 раза. |
φг = 30 – 45° – угол |
||
естественного откоса грунта в движении. (принимать ε=0,5 – 1). |
|||
Техническая производительность: |
|
||
Пт 3600 bт hт vp |
П0 , |
(2.3) |
|
kp |
|
|
|
|
|
||
где bт, hт – ширина и глубина траншеи, м;
vp – рабочая скорость передвижения траншеекопателя, м/с;
kр – коэффициент, учитывающий потери грунта на раструску (пересыпание через скребок и обратное падение в траншею);
37
kр = 0,92 при vц = 1 м/с; kр = 0,75 при vц = 2 м/с; kр = 0,5 при vц = 3 – 4 м/с.
2.3 Баланс мощности экскаваторов непрерывного действия.
Его определяют для того, чтобы установить режим работы на рабочих скоростях и назначить максимальную транспортную скорость.
Для цепных траншеекопателей:
Nдвиг Nцепи Nпер Nтр Nнас , |
(2.4) |
где Nдвиг, Nцепи, Nпep, Nтр, Nнаc– мощности, расходуемые соответственно двигателем на привод цепного рабочего органа, передвижение экскаватора с рабочей скоростью, привод отвальных конвейеров и системы управления экскаватором (гидронасосы, механические лебедки), кВт.
Мощность, расходуемая на привод цепного рабочего органа:
Nцепи (Nкоп Nпод ) / прив , |
(2.5) |
где Nкоп, Nпод – мощность, расходуемая соответственно на копание грунта и |
|
его подъем из забоя до высоты выгрузки, кВт. |
|
Мощность, расходуемая на копание грунта: |
|
Nкоп kкоп Пт /(3600 103 ц ) , |
(2.6) |
где Nкоп– удельное сопротивление копанию, Н/м2;
kкоп = 100000, 200000, 300000 и 400000 Н/м2 для грунтов I - IV
категорий;
kкоп = 2(106–107) Н/м2 для мерзлых грунтов всех категорий; Пт – техническая производительность, м3/ч;
Пт=bтhтvр;
bт и hт – в м;
VР – в м/ч;
ηц – КПД рабочей цепи; ηц = 0,60 – 0,65 для свободно провисающей ковшовой цепи;
ηц = 0,40– 0,45 для скребковой цепи. |
|
Эта же мощность: |
|
Nкоп Rк vц /(10 3 ηц ) , |
(2.7) |
где ∑Rк – суммарная касательная составляющая реакция грунта на рабочий орган, Н;
∑Rk = Rk1 + Rk2 + Rk3 +…+ Rki;
Rki – касательные реакции, действующие на каждый ковш. Мощность, затрачиваемая на подъем грунта ковшовым рабочим органом:
N |
под |
γ П |
т |
(H' |
0 |
0.5 h |
|
)/(3600 103 |
η ) , |
(2.8) |
|
|
|
T |
|
ц |
|
||||
|
|
|
|
|
|
|
38 |
|
|
|

где γ – удельный вес грунта ненарушенной структуры, Н/м3; Пт – в м3/ч; Н΄0 – высота подъема грунта, м;
hт – глубина копания, м.
Мощность, затрачиваемая на подъем грунта скребковым рабочим органом:
Nпод γ Пт (H'0 0.5 hт )(1 fr ctgβtgβ)/( 0 103 ц ) , (2.9)
где fr – коэффициент трения грунта о грунт;
β – угол наклона (град) траектории движения скребка к горизонту
[50°– 75°].
Рисунок 2.3 Расчетные схемы траншейных экскаваторов
Мощность, расходуемая на передвижение экскаватора с рабочей скоростью:
Nпер F vp /(103 пер ) , |
(2.10) |
где F – суммарное сопротивление передвижению экскаватора с учетом |
|
реакций со стороны грунта на рабочий орган и уклона поверхности движения, Н;
VP – в м/с;
ηпер – КПД передач, включая потери на трение в движителе;
Vp = Пт/3600bтhт, |
(2.11) |
39 |
|