

§2. Выпуклое множество допустимых значений вектора варьируемых параметров
Широкий класс методов оптимизации ориентирован на решение задач оптимизации, у которых множество допустимых значений вектора варьируемых параметров является выпуклым множеством.
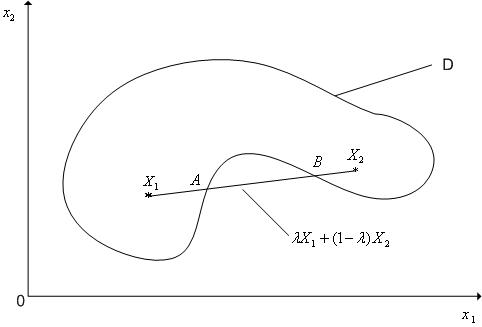
Множество
D
называется выпуклым
множеством,
если для любых точек
![]() и для любого
и для любого![]() выполняется соотношение
выполняется соотношение![]() (рисунок 1). В противном случае множество
допустимых значенийD
называется не
выпуклым множеством (рисунок
2).
(рисунок 1). В противном случае множество
допустимых значенийD
называется не
выпуклым множеством (рисунок
2).

Рисунок
1 - К определению
выпуклого множества (n=2).
Все точки отрезка
![]() принадлежат множествуD
принадлежат множествуD
Рисунок
2 - Пример не
выпуклого множества
(n=2).
Часть
![]() отрезка
отрезка![]() не принадлежат множествуD
не принадлежат множествуD
Множество
![]() будем называтьотрезком
с концами
будем называтьотрезком
с концами
![]() и обозначать
и обозначать![]() .
.
На
основе введенного понятия, можно дать
другое определение выпуклого множества
D.
Множество допустимых значений вектора
варьируемых параметров D
называется выпуклым
множеством,
если оно наряду с любыми точками
![]() содержит в себе также отрезок
содержит в себе также отрезок![]() .
.
Из
определения следует, что все евклидово
пространство
![]() является выпуклым множеством.
является выпуклым множеством.
Легко
показать, что любой отрезок
![]() в пространстве
в пространстве![]() является выпуклым множеством.
является выпуклым множеством.
Из
курса аналитической геометрии известно,
что в пространстве
![]() уравнение
уравнение
![]() (1)
(1)
определяет
гиперплоскость.
Здесь
![]() некоторые константы.
некоторые константы.
Теорема
1. Гиперплоскость
![]() является выпуклым множеством в
пространстве
является выпуклым множеством в
пространстве![]() .
.
Доказательство. Уравнение (1) перепишем в виде скалярного произведения
![]() , (2)
, (2)
где
n-мерный
вектор
![]() .
Возьмем произвольные точки
.
Возьмем произвольные точки![]() ,
удовлетворяющие уравнению (2):
,
удовлетворяющие уравнению (2):![]() ,
,![]() .
Рассмотрим некоторую точку
.
Рассмотрим некоторую точку![]() ,
принадлежащую отрезку
,
принадлежащую отрезку![]() .
По свойствам скалярного произведения
имеем
.
По свойствам скалярного произведения
имеем
![]() .
.
Это означает, что точка X принадлежит гиперплоскости (2)●
Очевидно,
что в пространстве
![]() уравнения (1), (2) определяют прямую,
а в пространстве
уравнения (1), (2) определяют прямую,
а в пространстве![]() - плоскость.
- плоскость.
Опять
же из курса аналитической геометрии
известно, что в пространстве
![]() неравенство
неравенство
![]() (3)
(3)
определяет
полупространство.
Здесь
![]() также некоторые константы.
также некоторые константы.
Теорема
2. Полупространство
![]() является выпуклым множеством в
пространстве
является выпуклым множеством в
пространстве![]() ●
●
Для доказательства выпуклости множеств часто бывает полезна следующая теорема.
Теорема 3. Пересечение любого конечного числа выпуклых множеств является выпуклым множеством.
Доказательство.
Пусть
![]() – совокупность
p
выпуклых
множеств пространства
– совокупность
p
выпуклых
множеств пространства
![]() .
Рассмотрим множество
.
Рассмотрим множество
![]() ,
,
являющееся
пересечением множеств совокупности
![]() .
Пусть точки
.
Пусть точки![]() принадлежат множеству
принадлежат множеству![]() .
Тогда они также принадлежат каждому из
множеств
.
Тогда они также принадлежат каждому из
множеств![]() .
Так как множество
.
Так как множество![]() выпукло, то точка
выпукло, то точка![]() принадлежит этому множеству. Поскольку
множество
принадлежит этому множеству. Поскольку
множество![]() выбрано произвольно, то точка
выбрано произвольно, то точка![]() принадлежит множествуD●
принадлежит множествуD●
Из теоремы 4 следует, что выпуклыми множествами являются, например, следующие множества:
гиперпараллелепипед
 ;
;симплекс
 ;
;выпуклый многогранник в пространстве
 ,
определяемый системой неравенств
(каждое из которых задает полупространство)
,
определяемый системой неравенств
(каждое из которых задает полупространство)
![]()
![]()
……
![]() .
.
В
последних выражениях принято, что
![]() ,
,![]()
Покажем в заключение, что гипершар
![]() , (4)
, (4)
является выпуклым множеством (r>0).
Известно, что евклидова норма n-мерного вектора X есть
![]() .
.
Поэтому
неравенство (4) можно переписать в виде
![]() ,
гдеn-мерный
вектор
,
гдеn-мерный
вектор
![]() .
Пусть произвольные точки
.
Пусть произвольные точки![]() принадлежат гипершару (4) и
принадлежат гипершару (4) и![]() .
Тогда по свойству нормы имеем
.
Тогда по свойству нормы имеем
![]()
![]() .
.
Входные термины:
область допустимых значений вектора управляемых (варьируемых) параметров (переменных).
Выходные термины:
критерий оптимальности, функция цели, целевая функция, критерий эффективности, функция полезности;
детерминированная задача оптимального проектирования (оптимизации); задача оптимизации;
стохастическая задача оптимального проектирования (оптимизации);
оптимальное значение вектора управляемых (варьируемых) переменных (параметров);
наименьшее значение критерия оптимальности.