

3520
.pdfвеличину магнитосопротивления исследуемой многослойной гетерогенной структуры, были проведены исследования магниторезистивного эффекта.
В качестве примера на рис. 2 представлены экспериментальные зависимости магниторезистивного эффекта (МРЭ) для многослойной наноструктуры композит–полупроводник с толщиной полупроводниковой прослойки 0,4 и 1.44 нм. Из рисунка видно, что с увеличением напряженности магнитного поля величина электрического сопротивления уменьшается, т.е. наблюдается отрицательное магнитосопротивление, характерное для «туннельного магнитосопро-тивления» (ТМС) в наногранулированных композитах металл– диэлектрик. ТМС описывается эффектом спинзависимого туннелирования между соседними ферромагнитными гранулами, имеющими случайную ориентацию собственных магнитных моментов [4].
Представленная на рис. 3 зависимость магниторезистивного эффекта от толщины полупроводниковой прослойки показывает, что в исходном состоянии величина магнитосопротивления практически не меняется (кривая 1). Термическая обработка многослойной структуры приводит к росту магнитносопротивления более 2 % для образцов с толщиной полупроводниковой прослойки ~ 1,5 нм. Это является следствием магнитного упорядочения ферромагнитных гранул композиционных слоев. По всей видимости степень данного упорядочения не высокая. Мы наблюдаем уменьшение полей выхода намагниченности пленок в насыщение, но разрушение эффекта МРЭ вследствие скорелированности направлений намагниченности соседних металлических гранул не происходит.
Рис. |
2. |
Магниторезистивный |
эффект |
многослойной |
структуры после термической |
||
обработки при Т = 300 оС в течение 30 мин в атмосфере водорода при давлении 7.8 Торр при
толщине In35.5Y4.2O60.3: 0.4 нм (кривая 1) и 1.44 нм (кривая 2)
|
|
Заключение |
|
|
||
Для |
|
гетерогенной |
|
структуры |
||
{[(Co41Fe39B20)33.9(SiO2)66.1]/[In35.5Y4.2O60.3]}93 |
было |
|||||
установлено, что после отжига выше 400 |
|
0С состав |
||||
газовой |
среды |
влияет |
на |
электрическую |
||
проводимость |
образцов, |
|
если |
|
толщина |
|
полупроводниковой прослойки больше 0.83 нм, при этом значительное влияние водорода на пленки наблюдается при h > 1нм. Для таких пленок после термообработки наблюдается и рост магнитосопротивления, что имеет практическое значение при разработке комбинированных датчиков.
Рис. 3. Зависимость величины МРЭ от толщины полупроводниковой прослойки в многослойной
структуре при H = 0–8 кЭ: 1- исходное состояние; 2
– после термической обработки при Т = 300 оС в течение 30 мин в атмосфере водорода при давлении 7.8 Торр
Литература
1.Ситников А.В. Электрические и магнитные свойства наногетерогенных систем металл – диэлектрик: дис. д–ра физ. – мат. наук / Ситников Александр Викторович – Воронеж, 2010. – 318 с.
2.Kalinin Yu.E. Electrical properties and giant
magnetoresistance of CoFeB – SiO2 amorphous granular composites / Yu.E. Kalinin, A.V. Sitnikov, O.V. Stognei, I.V. Zolotukhin, P.V. Neretin // Mat. Scien. and Engin. – 2001. – A304 – 306. – P. 941 – 945.
3.Золотухин И.В. Электрическое сопротивление
аморфных нанокомпозитов CoTaNb+SiO2 / И.В. Золотухин, П.В. Неретин, Ю.Е. Калинин, О.В. Стогней, А.В. Ситников //Альтернативная энергетика и экология. – 2002. – № 2. – С. 7 – 14.
4.Helman J.S. Tunneling of Spin-Polarized Electrons and Magnetoresistance in Granular Ni Films / J.S. Helman, B. Abeles // Phys. Rev. Lett.-1976.-V.37, №21.-P.1429-1433.
49
УДК 621.396.969
МЕТОД ПРЯМОГО АЛГЕБРАИЧЕСКОГО ВЫЧИСЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В МНОГОПОЗИЦИОННОЙ РАЗНОСТНОДАЛЬНОМЕРНОЙ СИСТЕМЕ ПАССИВНОЙ РАДИОЛОКАЦИИ
Студенты группы РТ-101 Крюков Д.Ю., Курьян Ю.С. Руководитель: канд. техн. наук, профессор Матвеев Б.В.
В данной работе представлены результаты исследований по определению координат источников радиоизлучения путем линеаризации системы алгебраических уравнений для оценки дальности и угловых координат. Проведен анализ точности измерения плоскостных координат разностно-дальномерными системами произвольной конфигурации. Эффективность работы алгоритма оценена с помощью математического моделирования
Локационные радиоэлектронные средства (РЭС) выдают информацию о наличии в предусмотренных участках пространства неизвестных и известных заранее объектов, об их координатах, других параметрах движения и характеристиках [1]. Измерение координат источников радиоизлучения (ИРИ) представляет собой многоэтапную задачу, решаемую, как правило, в условиях сложной электромагнитной обстановки с применением большого числа технических средств. В связи с этим разработчики современных радиолокационных систем и специалисты в области радиопеленгации проявляют значительный интерес к проблемам создания высокоточных алгоритмов определения координат ИРИ, позволяющих повысить быстродействие, технико-экономические показатели и надежность функционирования системы в целом.
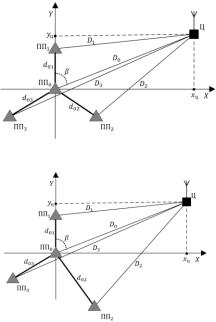
При выборе конфигурации РДС учитывается возможный вид обзора: секторный или круговой. В последнем случае целесообразно использовать симметричную конфигурацию РДС относительно центрального (опорного) пункта (рис. 1). Кроме того, в строго симметричной конфигурации РДС более простым оказывается и алгоритм определения координат ИРИ. Однако, в реальных условиях размещения РДС на местности строгую симметрию обеспечить не представляется возможным. В этом случае уравнения для оценки дальности и угловых координат оказываются нелинейными, что затрудняет их решение, особенно при числе пунктов
координаты ППi |
x |
, y |
и разность дальностей |
R |
на |
|
|
i |
i |
|
|
i |
|
независимых базах |
d01, d02 и |
d03. Измерение |
||||
разностей дальностей эквивалентно измерению относительных временных сдвигов сигналов, прошедших различные пути распространения. Оно организуется, когда ИРИ не синхронизирован с ПП радиолокационной системы.
Рис. 1. Симметричная конфигурация РДС с 4 приемными пунктами
Рис. 2. Несимметричная конфигурация РДС с 4 приемными пунктами
приема M > 3 |
[2]. |
Метод прямого вычисления координат ИРИ позволяет систему нелинейных уравнений в несимметричной РДС (рис. 2) заменить линейной, если общее число уравнений в такой системе по независимым базам на единицу превышает число неизвестных координат. Цель работы заключается в разработке адекватной математической модели, позволяющей с достаточной точностью оценить эффективность метода прямого вычисления координат ИРИ при его применении в пассивных многопозиционных РДС произвольной конфигурации в условиях, близких к реальным.
Исходной информацией для вычисления координат ИРИ с помощью РДС являются
РДС местоопределения объектов называют также гиперболическими [3]. Определение положение ИРИ в таких системах можно интерпретировать как вычисление координат точки пересечения гипербол (гиперболоидов), фокусы которых совпадают с положением ПП сигналов. В соответствии с этим, выражение, связывающие координаты ИРИ, координаты ППi и разности расстояний имеет вид [4]:
D2 |
(x |
Ц |
x )2 |
( y |
Ц |
y |
)2 |
(R |
D )2 |
, (1) |
||
i |
|
i |
|
|
i |
|
|
i |
0 |
|
||
|
где xЦ , yЦ - |
координаты |
ИРИ; |
xi , yi - |
||||||||
координаты ППi . |
|
|
|
|
|
|
|
|
|
|||
50
В результате преобразования выражения (2)
получим систему уравнений: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
x |
Ц |
x |
|
y |
Ц |
y |
|
R |
|
D |
0 |
|
0.5 a |
; |
|
|
|
|
|||||||||
|
|
1 |
|
|
|
|
1 |
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|||||||
x |
|
x |
|
y |
|
|
y |
|
R |
|
D |
|
0.5 a |
|
; |
|
|
|
|||||||||
|
Ц |
2 |
Ц |
|
2 |
2 |
0 |
2 |
|
|
|
||||||||||||||||
|
|
|
x3 |
yЦ |
y3 |
R3 |
D0 |
0.5 a3 ; |
|
|
(3) |
||||||||||||||||
x |
|
|
|
||||||||||||||||||||||||
Ц |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
Ц |
x |
M 1 |
y |
Ц |
y |
M 1 |
|
R |
M 1 |
D |
0 |
0.5 a |
M 1 |
, |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
a x |
2 |
|
y |
2 |
R |
2 |
, |
i |
1,(M 1). |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
i |
|
|
i |
|
|
|
|
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
Полученную |
|
|
|
|
систему |
|
|
уравнений |
|
|
(3) |
||||||||||||||||
целесообразно представить в матричной форме [2]: |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
A P 0.5 a, |
|
|
|
|
(4) |
||||||||||
где A – матрица размерностью |
|
(M 1) l |
(l – |
||||||||||||||||||||||||
число измеряемых координат ИРИ), P – вектор |
|||||||||||||||||||||||||||
размерностью M l, a |
|
– |
|
вектор |
|
|
размерностью |
||||||||||||||||||||
(M 1) l : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Определению в матричном уравнении (5) подлежит вектор Р, содержащий в общем случае
плоскостные прямоугольные координаты |
x |
Ц |
, y |
Ц |
и |
||||
|
|
|
|
|
|
|
|
||
полярную координату дальности |
D0 : |
|
|
|
|
|
|
||
T |
A) |
1 |
T |
a. |
(6) |
|
|||
P 0.5 ( A |
|
A |
|
||||||
Для исследования метода прямого вычисления координат ИРИ при его использовании в пассивных многопозиционных РДС произвольной конфигурации было проведено имитационное математическое моделирование в среде программирования MATLAB. При моделировании предполагалось, что исследуемая РДС в своем составе имеет три периферийных ПП, расположенных несимметрично относительно центрального ПП (рис. 2). В разработанной программе имеется возможность искусственного введения ошибок измерения временных сдвигов по каждой из независимых баз РДС.
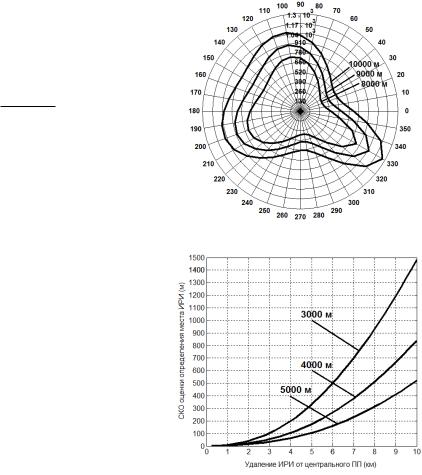
На рис. 3 изображены зависимости СКО оценки определения места ИРИ от угла прихода радиоволны в виде изолиний, при удалении цели от центрального ПП на 8000 м, 9000 м и 10000 м. Ошибка измерения
временных сдвигов 01, 02 и 03 |
по каждой из |
независимых баз составляет 100 нс. |
|
На рис. 4 приведены зависимости СКО оценки определения места ИРИ при удалении цели от центрального ПП и угле прихода радиоволны 30º для
баз d 01 и d03 равных 3000 м, 4000 м и 5000 м. При этом, из-за несимметричной конфигурации исследуемой РДС (рис. 3), база d02 будет равна 6000 м, 8000 м и 10000 м соответственно. Ошибка
измерения временных сдвигов |
|
01 |
, |
02 |
и |
03 |
по |
|
|
|
|
|
каждой из независимых баз составляет 100 нс.
Таким образом, представленный метод позволяет относительно просто решать задачи определения координат ИРИ для произвольной конфигурации несимметричной РДС, при неодинаковых базах и их взаимных угловых положениях друг относительно друга.
Статья написана при поддержке Российского фонда фундаментальных исследований (РФФИ) проект №13-08-97538-р. центр. а.
Рис. 3. СКО оценки определения места ИРИ (в метрах) в зависимости от угла прихода радиоволны
Рис. 4. СКО оценки определения места ИРИ в зависимости от удаления его от центрального ПП
Литература
1.Радиоэлектронные системы: Основы построения и теория. Справочник. Изд. 2-е, перераб. и доп. / Под ред. Я.Д. Ширмана. – М.: Радиотехника, 2007. – 512 с.: ил.
2.Симаков В.А. Определение плоскостных и пространственных координат источников радиоизлучения
автономными разностно-дальномерными системами пассивной локации / В.А. Симаков, В.М. Терешко // Приоритеты военно-технической деятельности ФПС России по предупреждению и пресечению террористической деятельности на современном этапе: науч.-техн. сб. по материалам межвед. конф. / НИИТЦ ФПС. - М., 2003. - С. 45-47.
3.Кондратьев В.С. Многопозиционные радиотехнические системы / В.С. Кондратьев, А.Ф. Котов, Л.Н. Марков; Под ред. проф. В.В. Цветнова. – М.: Радио и связь, 1986. – 264 с.: ил.
4.Черняк В.С. Многопозиционная радиолокация. –
М.: Радио и связь, 1993, 416 с.
5.Под ред. Ширмана Я.Д. Теоретические основы радиолокации. – М.: Сов. Радио, 1970, 560 с.
6.Дубыкин В.П. Моделирование М-позиционной пассивной разностно-дальномерной системы обнаружения
сигналов и измерения координат источников радиоизлучения [Текст] / В.П. Дубыкин, Д.Ю. Крюков, Ю.С. Курьян, Д.В. Асотов // Вестник Воронежского государственного технического университета. –2013. –Т.9. –№6-1. –С.44-47.
51
УДК 681. 3
МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС КОНТРОЛЯ ФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ЧЕЛОВЕКА
Студент группы РК-091 Минаков Н.А. Руководитель: канд. техн. наук, доцент Журавлѐв Д.В.
Проведен анализ существующих телемедицинских систем дистанционного мониторинга медикобиологических показателей человека. Разработан мобильный диагностический комплекс контроля физиологического состояния организма имеющий применение в спортивной медицине для повышения эффективности тренировочных процессов, также для определения уровня физического состояния отдельных категорий.
Не смотря на бурное развитие микроэлектроники и компьютерной техники, некоторые области телемедицины остаются мало оснащенными необходимым оборудованием. На рынке существует дефицит маломощных систем дистанционого контроля медико-биологических показателей организма человека, работающих в пределах малого радиуса действия, отличающихся простотой конструкции и сравнительно малыми габаритами.
На кафедре радиоэлектронных устройств и систем при ВГТУ был разработан мобильный диагностический комплекс контроля физиологического состояния организма.
Известно мобильное диагностическое устройство (МДУ) [1].
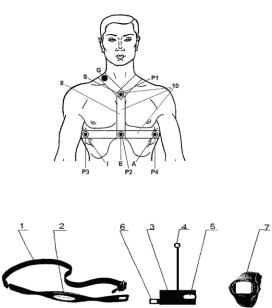
Работа МДУ контролируется посредством персонального мобильного средства коммуникации на котором пользователь, посредством специального программного приложения, может видеть контролируемые посредством МДУ параметры жизнедеятельности. Мобильное диагностическое устройство не является комплексом и предназначено для контроля физиологического состояния одного пациента. Известны также беспроводные регистраторы [2,3]. Канал регистрации ЭКГ регистратора [2] образован активными электродами Е, A, S, I, соединенными с входом модуля регистратора 1. Опорный ЭКГ электрод G служит для устранения синфазных наводок. Схема крепления прибора показана на рис. 1. Канал регистрации радиоприемника выполнен по тетраполярной схеме и включает первый генератор, подключенный к дополнительным электродам Р1 и Р2, и ЭКГ-электроды S и Е, соединенные с входом модуля регистратора. Кардиомонитор [3] осуществляет передачу данных ЭКГ на наручные часы, интерпретирующие регистрируемую информацию. Состав кардиомонитора показан на рис. 2.
Устройство работает следующим образом. Грудной пояс 1 накладывают на грудь спортсмена. Электроды снимают потенциал ЭКГ, максимально свободный от сигналов миограммы, возникающий от напряжения скелетной мускулатуры. Это позволяет производить регистрацию ЧСС у человека, совершающего работу, в том числе и под водой, даже находящегося в морской воде.
Приемник 3 принимает сигналы передатчика в поясе 1, усиливает их и формирует сигналы светодиода 4 и пингера 5, а микроконтроллер регистрирует их в памяти для последующего анализа динамики изменений сердечного ритма.
Рис. 1. Схема крепления прибора для мониторинга функционального состояния человека
Рис. 2. Состав кардиомонитора
Разработанный мобильный диагностический комплекс контроля физиологического состояния организма позволяет проводить контроль состояния сердечно-сосудистой системы и температуры тела, например спортсменов в процессе их тренировок и занятий активными физическими нагрузками. Для регистрации электрокардиосигнала (ЭКС) в комплексе используются одновременно работающие устройства регистрации. Базовое количество устройств регистрации – 4, но оно может быть легко увеличено за счет добавления модулей приемопередачи в устройство мониторинга. Устройства регистрации ЭКС и температуры позволяют проводить регистрацию, обработку и передачу данных в режиме ―реального времени‖ по радиоканалу на устройство мониторинга работающего в системе. Устройство мониторинга может работать как самостоятельно, так и совместно с любым IBM совместимым компьютером. Устройство мониторинга позволяет осуществлять автоматизированный сбор поступающих данных их
52
обработку и управление всеми взаимодействующими с ним регистраторами.
Габаритные размеры и масса регистраторов не превышают 100 x 50 x 10 и 200 гр. соответственно, для обеспечения удобства ношения и не скованности движений. Устройства регистрации обеспечивают регистрацию не менее 2-х электрокардиографических отведений с разрешающей способностью не хуже 5 мкВ. Как известно закон изменения ЭКС во времени может считаться квазипериодическим с периодом
кардиокомплексов (RR-интервалов) TRR 1 3c .
Форма эквивалентного кардиокомплекса близка к треугольной с амплитудой, лежащей в диапазоне 0-5 мВ. Полоса занимаемых кардиокомплексом частот охватывает диапазон от 0.05 до 800 Гц. Регистраторы имеют полосу пропускания не уже
f 0.05 100Гц , соответствующую наиболее
информативной части ЭКС. Конструкция входных узлов регистраторов и узлов обработки ЭКС обеспечивает приемлемое качество регистрации ЭКС и его передачи на базу системы в условиях сложной электромагнитной обстановки вызванной как внешними помехами так и помехами от собственного модуля радиоканала. Входное сопротивление прибора не менее 3 – 10 МОм. При
таких значениях |
Z ВХ |
можно пренебречь потерями в |
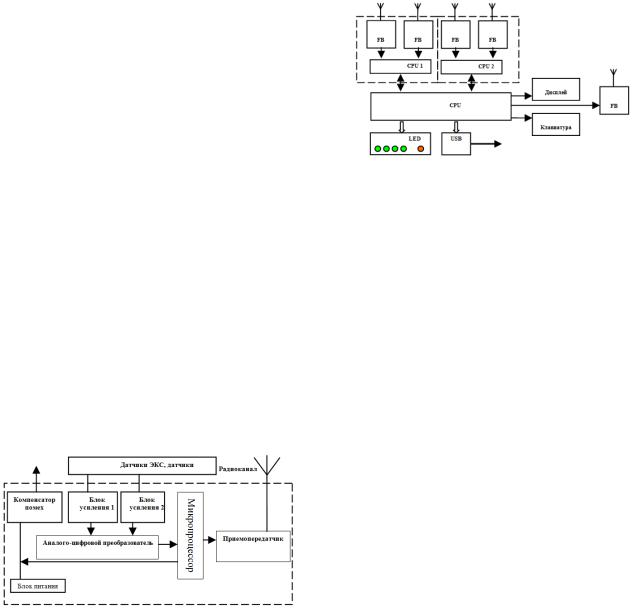
передаче напряжения ЭКС и допустить разбаланс сопротивлений кожа – электрод до 5–10 кОм. Радиопередающие устройства регистраторов обеспечивают уверенную передачу данных по радиоканалу в радиусе до 40 метров. Входные устройства аналоговой обработки регистрируемого сигнала, включают в себя: два блока усиления, собранных на высокостабильных дифференциальных усилителях INA118U; Компенсатор синфазных помех, собранный на микросхеме MAX478CSA (микромощный высокоточный источник опорного напряжения). В качестве приемо-передатчика использована готовая микросборка RFB433. Работой всего устройства управляет микропроцессор MSP430F149IPM, включающий в себя аналого-цифровой преобразователь. Структурная блок-схема устройств регистрации показана на рис. 3.
Рис. 3. Блок-схема устройств регистрации мобильного диагностического комплекса
В качестве усилителя ЭКС и температуры использовался инструментальный усилитель INA118
[4]. С выхода усилителя кардиосигнал поступает в аналого-цифровой преобразователь микроконтроллера MSP430, где проходит дальнейшую обработку. Электропитание всей схемы регистраторов ЭКС осуществляется от аккумулятора GP180AAHC-B 2BP емкостью 1800 мАч, что хватает на 90 часов непрерывной работы приборов.
Мобильный диагностический комплекс отвечает требованиям электромагнитной совместимости устройств в силу малой мощности приемопередатчиков 1мВт и используемой радиочастоты 433МГц.
Для приѐма, обработки и передачи полученной с помощью устройств регистрации информации разработано многоканальное радиоприемное устройство (устройство мониторинга), блок-схема которого показана на рис. 4.
Рис. 4. Блок-схема устройства мониторинга
Здесь модули радиоканала осуществляют преобразование информации, принятой в цифровом последовательном фазоманипулированном коде «Манчестер-II». Центральный процессор устройства мониторинга выполняет сбор и декодирование данных, принятых со всех устройств регистрации и группирует их в пакеты для передачи в ЭВМ. Для обеспечения необходимой вычислительной мощности в каждый блок ввода введен свой микропроцессор. Этот микропропроцессор проводит всю предварительную обработку сигнала. Поэтому центральный процессор имеет возможность провести окончательную обработку данных собранных сразу со всех каналов.
Литература
1.Патент на полезную модель РФ №128469, Мобильное диагностическое устройство, 2013 г.
2.Патент на полезную модель РФ №132701, Прибор для мониторинга функционального состояния человека, 2013 г.
3.Патент на изобретение РФ №2455928, Кардиомонитор, 2012 г.
4.Журавлѐв Д.В. Оптимальный усилитель биопотенциалов в устройствах сбора биомедицинской информации. // Биотехнические, медицинские и экологические системы и комплексы. ―Биомедсистемы – 2004‖. Материалы всероссийской научно-технической конференции студентов, молодых учѐных и специалистов, Рязань, 2004 г. С. 31-32.
53

УДК 621.37.037
ОПРЕДЕЛЕНИЕ КООРДИНАТ ИЗЛУЧАЮЩИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ МЕТОДА НАИМЕНЬШИХ КВАДРАТОВ
Студент группы РТ-091 Кирпичѐв Е.М. Руководитель: канд. техн. наук, доцент Дубыкин В.П.
В работе рассматривалась многопозиционная пассивная разностно-дальномерная система определения координат излучающих объектов. Разработаны методики и алгоритмы определения координат излучающих объектов с использованием метода наименьших квадратов.
Непрерывное повышение требований к объему и качеству радиолокационной информации, помехозащищенности и живучести радиолокационных средств вынуждает специалистов не только искать новые технические решения в создании основных компонентов радиолокационных станций (РЛС) – антенн, передающих и приѐмных устройств, устройств обработки сигналов и др., но и развивать новые направления в области методов радиолокации[1].
С помощью разностно-дальномерного метода можно определить координаты излучающего объекта, не зная априори момент излучения принимаемых сигналов, что позволяет применять разностно-дальномерный метод для определения координат излучающих объектов. Высокая точность определения координат, отсутствие необходимости в направленных антеннах, позволяет реализовать РДС простой, дешѐвой и высокоточной, по сравнению с другими системами[2,3].
При пассивном режиме работы разностнодальномерной системы (РДС), исходными данными являются координаты приѐмных позиций (ПП) и относительное запаздывание сигналов на входах ПП, образующих базу. Определив относительное запаздывание сигналов -  , можно вычислить разности дальностей[3]:
, можно вычислить разности дальностей[3]:
где  – скорость света,
– скорость света,  – разности моментов прихода сигнала от излучающего объекта до ПП,
– разности моментов прихода сигнала от излучающего объекта до ПП,  соответствующая разность дальностей от излучающего объекта до ПП.
соответствующая разность дальностей от излучающего объекта до ПП.
Применительно к задаче определения координат излучающих объектов на плоскости выражения, связывающие координаты излучающих объектов, координаты ПП и разности расстояний имеют вид[4]:
где  – разность расстояний от ИРИ до i-го и j-го ПП;
– разность расстояний от ИРИ до i-го и j-го ПП;  – разности моментов прихода сигнала от излучающего объекта до i-го и j-го ПП; с – скорость света.
– разности моментов прихода сигнала от излучающего объекта до i-го и j-го ПП; с – скорость света.
Представив векторы координат источника радиоизлучения и пунктов наблюдения в виде
 . Тогда уравнение определения разностей дальности для каждой базы можно представить в следующем виде:
. Тогда уравнение определения разностей дальности для каждой базы можно представить в следующем виде:
Для определения координат излучающих объектов на плоскости разностно-дальномерная система должна состоять как минимум из трех ПП[3]. Координаты ИРИ можно определить путѐм решения системы нелинейных уравнений (3), связывающих координаты источника радиоизлучения, пунктов приѐма сигналов и измеренные разности моментов прихода сигнала[4].
Система уравнений (3) является переопределѐнной (количество неизвестных меньше количества уравнений), аналитически не решаемой. Для решение переопределѐнной системы уравнений используют различные статистические методы оценивания. Наиболее прост и понятен итерационный метод наименьших квадратов, который позволяет найти такие решения  которые наилучшим образом будут удовлетворять всем уравнением. То есть, те корни уравнений системы, при которых сумма квадратов разности левой и правой части уравнений минимальна, являются наилучшим решением системы.
которые наилучшим образом будут удовлетворять всем уравнением. То есть, те корни уравнений системы, при которых сумма квадратов разности левой и правой части уравнений минимальна, являются наилучшим решением системы.
Преобразуем систему (3) методом наименьших квадратов[12]:
 (4)
(4)
Определение координат x, y сводится к поиску глобального минимума функции[4]:
Существует |
множество |
алгоритмов |
поиска |
глобального |
минимума |
функции |
двух |
переменных[5]. Все они имеют разную точность сходимости алгоритма.
В работе исследованы наиболее распространенные методы поиска глобального минимума: метод координатного спуска, методы градиента и метод сеток [5].
Наиболее эффективно с поставленной задачей справляется метод сеток.
Иллюстрация к методу сеток отображена на рисунке. Отрезки [ai;bi], i=1,2,...,n, определяющие область поиска минимума функции f (x1,x2,...,xn), делятся на равные части длиной hi=(bi–ai)/ni. Значения ni подбираются так, чтобы обеспечить одинаковый порядок чисел hi , i=1,2,...,n. Во всех
"узлах" полученной сетки, т.е. |
в точках (a1+i h1, |
|
a2+j h2 ,..., |
an+k hn), i=0,1,...,n1, |
j=0,1,...,n2, ..., |
54
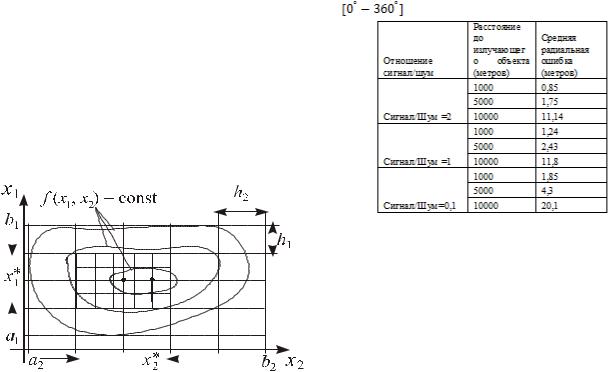
k=0,1,...,nn, вычисляются значения функции и выбирается "узел" сетки (x1*,x2*,...,xn*), которому соответствует минимальное значение искомой функции. Если этот "узел" лежит на границе заданной области, то положение границ изменяется
и описанная процедура повторяется до тех пор, пока |
||||
он не станет внутренним. Если |
max |
h |
|
|
i 1,2,...,n |
i |
|
||
|
|
|
||
(заданной точности), то вокруг этого "узла" формируется новая область по правилу ai=xi*–hi, bi= xi*+hi, i=1,2,...,n, и вычисляются новые значения hi и т.д. В противном случае за точку минимума функции принимается (x1*,x2*,...,xn*).
Иллюстрация к методу сеток.
Данный метод гарантирует нахождение глобального экстремума функции (5), то есть координат излучающего объекта.
На основе вышеизложенного алгоритма был реализован программный продукт, позволяющий по известным относительным запаздываниям сигналов от излучающего объекта до ПП определить координаты излучающих объектов.
В таблице представлены усреднѐнные значения СКО определѐнных координат излучающих объектов, рассчитанные при различных отношениях сигнал/шум на различных дальностях до излучающих объектов от геометрического центра РДС, базы которой одинаковы (B=10 км).
Значения СКО |
координат |
излучающих |
объектов, усреднѐнных |
по азимуту |
в пределах |
: |
|
|
Анализ приведѐнных в таблице данных показывает, что предоставленная методика и разработанный на основе неѐ алгоритм определения координат излучающих объектов с использованием метода наименьших квадратов и оценки точности их измерений может быть использован в разрабатываемых и существующих разностнодальномерных системах различного назначения, т.к. обеспечивает приемлемую точность определения координат.
Литература
1.Черняк В.С. Зарубежная радиоэлектроника – М. «Радио и связь» 1987 г. 174 стр.
2.Черняк В. С. Многопозиционная радиолокация – М. «Радио и связь» 1993 г. 418 стр.
3.Ширман Я.Д. Теоритические основы радиолокации // М. «Радио и связь» 1970 г. 560 стр.
4.Ворошилин Е.П, Миронов М.В. Определение координат источников радиоизлучения в разностнодальномерных системах - ФЦП «Научные кадры инновационной России» 2013г. 6 стр.
5.Калиткин Н.Н Численные методы. М. Наука, 1978г. 512 стр.
6.Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения - Государственное издание оборонной промышлености М. 1958 г. 54 стр.
55
УДК 621.396
ОПТИМИЗАЦИЯ ИЗЛУЧАЮЩЕГО РАСКРЫВА ДИФРАКЦИОННОЙ АНТЕННЫ ПО КРИТЕРИЮ ОБЕСПЕЧЕНИЯ ТРЕБУЕМОЙ ФОРМЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ
Студент группы РТм-121 Кирпичева И.А. Руководитель: д-р техн. наук, профессор Останков А.В.
На основе использования генетического алгоритма и электродинамической модели продемонстрирована возможность реализации требуемых характеристик направленности с помощью антенны дифракционного типа с открытой электродинамической структурой типа «диэлектрический волновод – отражательная решетка»
Для расчета излучающего раскрыва антенны дифракционного типа его в первом приближении разумно описать моделью линейной неэквидистантной антенной решетки изотропных излучателей [1]. Расчет расстояний между излучателями (периодов) в составе раскрыва потребовал нестандартного подхода. В связи с этим был применен модифицированный генетический алгоритм, предложенный в [2].
Генетический алгоритм адаптирован для поставленной задачи - получения косекансной диаграммы направленности (ДН). В качестве целевой функции, величина которой при поиске периодов должна быть минимизирована, использовано среднеквадратичное отклонение синтезируемой ДН от идеальной. При оптимизации число периодов (оптимизируемых величин) составляло 38, численность популяции – не менее 200. В ходе численной оптимизации были получены конкретные числовые значения периодов решетки, обеспечивающие совпадение в заданном секторе углов ДН антенной решетки и идеальной косекансной ДН с точностью не хуже 5 %.
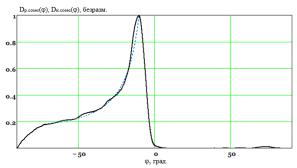
Следующим этапом расчета излучающего раскрыва антенны являлось адаптация полученных результатов идеализированной структуры к реальной. Для этого была использована изложенная в [3] электродинамическая модель антенны дифракционного типа с открытой электродинамической структурой типа «диэлектрический волновод – отражательная решетка». На конструктивные параметры антенны были наложены определенные ограничения. С учетом этих требований и электродинамической модели была пересчитана ДН, полученная после оптимизации. Она представлена на рисунке.
Длина излучающего раскрыва антенны, определяемая как сумма всех периодов решетки, не превышает 190 мм. В качестве диэлектрика для планарного волновода был выбран фторопласт с относительной диэлектрической проницаемостью, равной 2.2.
ДН антенны с оптимизированным излучающим раскрывом
При выборе толщины диэлектрического волновода и прицельного расстояния необходимо было исходить из условия обеспечения коэффициента замедления волновода, равного 1.16.
При этом толщина волновода составила |
0,326 |
, а |
|
|
|
||
расстояние между волноводом и решеткой |
0, 6 |
, где |
|
|
|||
- длина излучаемой волны. Глубина канавок металлической гребенки выбрана плавно увеличивающейся в направлении распространения вытекающей волны для обеспечения симметричного относительна центра раскрыва амплитудного распределения. Максимальные значения глубин не превышали резонансных значений. Рабочая длина волны антенны составляла 8.15 мм.
Литература 1. Евдокимов А. П., Крыжановский В. В. Плоские
антенные решетки с косекансной формой диаграммы направленности 8-миллиметрового диапазона волн // Электромагнитные волны и электронные системы. – 2003. - № 10. – С. 52-57.
2. URL:http://twt.mpei.ac.ru/ochkov/Mathcad_12/3_31_genetic.mcd.
3. Останков А. В. Анализ и оптимизация дифракционной антенны поверхностной волны //
Антенны. 2010. № 9 (160). С. 44-53.
56
УДК 621.313.333.049.77
ОРБИТАЛЬНЫЙ ПРИВОД МУФТЫ ПРЕССА
Аспирант кафедры ЭАУТС Богданов А.О. Руководитель: д-р техн. наук, профессор Литвиненко А.М.
В данной статье проведено исследование роторного элемента орбитального привода муфты кривошипного пресса с помощью натурного эксперимента. По полученным результатам проведен факторный анализ и построена модель системы и определены параметры для построения макета.
В кузнечно-прессовом оборудовании (КПО) наибольшее распространение получили пневматические системы управления фрикционными муфтой и тормозом. Один из недостатков таких систем - необходимость использования для работы КПО двух энергоносителей: электрической энергии для привода главного электродвигателя и сжатого воздуха для управления (включения и отключения) муфтой и тормозом.
Применение в системе управления КПО сжатого воздуха снижает безопасность и надежность работы оборудования, а так же существенно уменьшает его эффективный КПД.
Были попытки создать электромеханическую систему управления КПО, в которой использовались асинхронные двигатели[1]. Но данная система управления, имела сложную механическую часть.
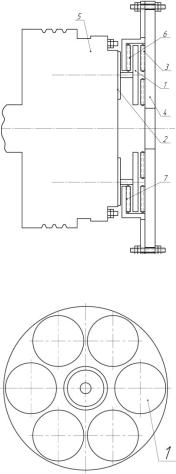
На рис.1 приведена схема орбитального привода муфты, где 1 дисковый ротор, установленный на валу модульного привода 2, в состав каждого из которых входят редуктор и преобразователь крутящего момента в перемещение нажимных элементов (например, типа винт-гайка), при этом редукторы и преобразователи размещены в корпусе 5. Элементы кольцевых статоров 3 связаны через воздушный зазор с дисковым ротором 1 и закреплены на стойке 4. Всего в орбитальном приводе муфты используется 6 модулей с дисковыми роторами, для обеспечения большего усилия, равномерно передаваемого на площадь нажимного диска[2]. Расположение модулей в орбитальном приводе муфты показано на рис. 2.
Роторный элемент является сам по себе ротором торцевого асинхронного электродвигателя. Особенностью настоящего электропривода является импульсный режим его работы, что предъявляет специальные требования к механической части: минимальное время разгона и соответственно минимальный момент инерции; возможность форсированного разгона; специфические условия эксплуатации связанные с повышенной температурой, линейными перегрузками, ударами, вибрацией; минимальная потребляемая мощность; минимальная стоимость.
Задачей решаемой в статье является выявление основных особенностей такого электродвигателя на основе натурного эксперимента. Метод решения данной задачи - физическое моделирование и обработка результатов с помощью планирования эксперимента.
Рис. 1. Орбитальный привод муфты
Рис. 2. Расположение модулей с дисковыми роторами, где 1 – дисковые роторы
Таким образом ставиться задача электромагнитного расчета, состоящая в проектировании в заданном объеме многороторной системы, которая обеспечивает требуемый номинальный момент, кратность максимального момента, при наиболее возможном КПД, и выполнения определенных эксплуатационных ограничений, состоящих в первую очередь, в недопущения выхода проектируемой электромеханической системы за габариты пневматического привода[3].
Центральным вопросом при определении геометрических размеров, является распределение объемов ротора и статора на медь и сталь, от этого зависит величина приведенного активного сопротивления ротора, определяющего во многом
57
параметры механической характеристики и энергетические показатели двигателя.
Известно, что торцевые машины обладают большей сложностью магнитных полей, по сравнению с машинами классического типа из-за неравномерности поля по радиусу. Это не позволяет приступить, в полной мере, к аналитическому исследованию полей и требует предварительного накопления экспериментальных данных, на специальных моделях для дальнейшего уточнения картины физического распределения потоков и выделения основных факторов[4].
Суказанной целью были проведены исследования двух полюсной, двух фазной торцевой магнитной системы, имеющей следующие размеры (рис.3): диаметр якоря 140 мм; рабочий воздушный зазор 1…2 мм; габариты сердечника катушек 11х14 мм; высота катушки 20 мм.
Сцелью увеличения технологичности, уменьшению стоимости обмоточных работ, проведено исследование возможности применения ротора на основе алюминиевого диска с ферромагнитными элементами в виде массива болтов малого диаметра (2.5 мм), обращенных головками к статору, при этом нарезная часть болтов используется для крепления внешнего шихтованного магнитопровода.
На основании предварительных исследований
вкачестве основных факторов были выделены: величина воздушного зазора; шаг болтов (при условии расположения болтов в 4 ряда); ток возбуждения; величина рабочей ѐмкости; количество болтов. Из них наиболее значимыми являются величина воздушного зазора, величина рабочей ѐмкости, количество болтов.
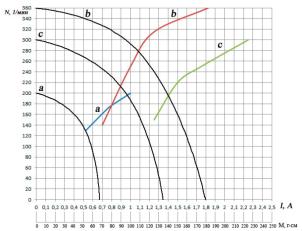
В дальнейшем была проведена серия экспериментов с различными параметрами. Полученные результаты зависимости скорости вращения от тока показаны на графиках для рабочей ѐмкости 10 мкф (a), 15 мкф (b), и 20 мкф (c). Так же получены механические характеристики для всех проведенных экспериментов. Результаты одного из экспериментов приведены на рис. 4.
На основании приведенных серий экспериментальных данных был проведен анализ для выявления степени влияния факторов на выходные характеристики привода (пусковой момент и скорость).
По результатам была построена математические модели для определения скорости и момента роторного элемента:
N 334.8 72.74 596.9 I 152.6 I 2 |
|
|
|
1.249 n 0.0084 n 2 ; |
|
(1) |
|
M 520.1 154.7 503.8 I 129.1 I 2 |
|
||
|
5.012 n 0.0785 n 2 .
В результате были получены модели которые упрощают дальнейшее исследование торцевого асинхронного электродвигателя. С помощью этих моделей можно определить характеристики системы с определенной погрешностью, изменяя те или иные параметры.
.
Рис. 3. Геометрические размеры модели орбитальной электромеханической системы, где 1 – вал, 2 – диск, 3 – катушки, 4 – болты
Рис. 4. Результаты эксперимента В, где воздушный зазор 2 мм, количество болтов 12 шт, a
– 10 мкф, b – 15 мкф, c – 20 мкф
Литература
1.Сафонов А.В. Новая энергосберегающая и экологически чистая электромеханическая система управления кузнечно-прессовым оборудованием // КШП ОМД. 2002. № 2. С. 19-23
2.Пат. 2504475 Российская Федерация МПК B 30 B 15/12, F 16 D 13/40. Привод муфты пресса –Литвиненко А.М., Крук В.А., Воскресенский Г.В. – №20101211309/02; заяв. 27.11.2011;Бюл. №33.
3.Игнатов В.А., Вильданов К.Я. Торцевые асинхронные электродвигатели интегрального изготовления. – М.: Энергоатомиздат, 1988 г. – 308 с.
4.Делекторский Б.А., Мастяев Н.З., Орлов И.Н. Проектирование гироскопических электродвигателей. – М.: Машиностроение, 1968 г. – 252 с.
58