

3306
.pdfслучае Т = 0.005 секунды. Управляемый преобразователь Vipr постоянного напряжения в постоянное – широтно-импульсный преобразователь ШИП (для двигателей не больше 10 кВт); переменного напряжения в постоянное - тиристорный выпрямитель (для двигателей свыше 10 кВт).
Требования к системе: статическая ошибка менее 1%, перерегулирование 5%, время переходного процесса минимальное для данного двигателя.
1.Какими получаются коэффициенты усиления PI регуляторов для разных скоростей?
2.Можно ли получить регуляторы, удовлетворяющие всем условиям?
3.Сравните реальный управляемый преобразователь ШИП или тиристорный с идеальным усилителем. Насколько отличаются переходные процессы?
4.Как наброс нагрузки и сброс нагрузки влияют на качество регулирования?
5.Нарисуйте возможную схему САР с реальными элементами.
ДОПОЛНЕНИЕ 1
Алгоритмы оптимизации. Формулировка задачи минимизации
При оптимизации параметров модели в Simulink® приложение Simulink Design Optimization ™ автоматически преобразует требования проекта в задачу оптимизации с ограничениями, а затем решает её с использованием методов оптимизации. Задачи оптимизации с ограничениями многократно просчитываются Simulink, результаты моделирования сравниваются со значениями границ и, используя методы оптимизации, изменяются настраиваемые параметры для более полного удовлетворения значениям границ.
В этом разделе описывается программное обеспечение, формулирующее задачу оптимизации с ограничениями, используемые алгоритмы оптимизации. Для каждого алгоритма оптимизации программное обеспечение формулирует один из следующих типов задач минимизации:
Feasibility (рамочное)
Tracking (трековое)
Mixed (смешанное рамочное и трековое)
Рамочная задача и установка ограничений
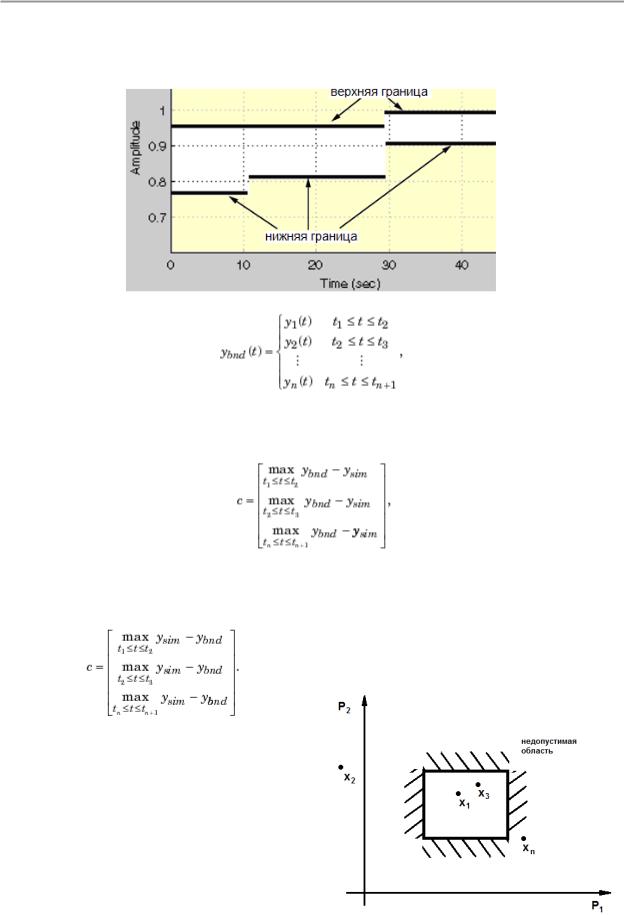
Рамочное - означает, что алгоритм оптимизации находит значения параметров, которые удовлетворяют всем ограничениям в пределах установленных границ, но не сводятся к минимуму любой цели или функции стоимости.
На следующем рисунке, x1, x3 и хn представляют собой комбинацию значений параметров P1 и P2 и возможные решения, потому что они не нарушают нижнюю границу ограничений.
В модели Simulink ограничивается сигнал, указанием нижней и верхней границ в блоке проверки (Check Step Response Characteristics...)
как показано на рисунке.
70
ЛАБОРАТОРНАЯ РАБОТА №5
Эти ограничения являются кусочно-линейными границами ybnd. Они связаны с n ребрами могут быть представлены в виде:
Программа рассчитывает расстояние между вычисляемой кривой модели и краем границы. Расчетное расстояние для нижних границ:
где ysim - расчетное значение и является функцией оптимизируемых параметров. Расчетное расстояние для верхних границ является:
Если все ограничения выполнены (с ≤ 0) для некоторой комбинации значений параметров, то это решение называется возможным. На следующем рисунке, x1 и x3 подходящие решения.
Когда модель имеет несколько условий или сигналы имеют векторные ограничения, сам вектор ограничений записывается с нарушением ограничений для каждого сигнала:
71
ЛАБОРАТОРНАЯ РАБОТА №5
Отслеживание трека
В дополнение к нижней и верхней границам, можно указать опорный сигнал (трек) для блока Check Against Reference, который может отслеживать выход модели Simulink. При отслеживании трека вычисляется сумма квадратов ошибки отклонений от цели.
Необходимо указать опорный сигнал в виде последовательности пар амплитудных значений и времени:
Программа рассчитывает ответ в виде последовательности пар амплитуд во времени:
где некоторые значения tsim могут совпадать со значениями tref. Новая временная база tnew формируется из объединения элементов tref и tsim. Элементы, которые не входят в минимально - максимальный диапазон как tref и tsim, опущены:
Используя линейную интерполяцию, программа вычисляет значения yref и ysim во временных точках tnew, а затем вычисляет уменьшенную ошибку:
Наконец, программа вычисляет взвешенную интегральную квадратичную ошибку:
Примечание: весовой коэффициент w(t) = 1 по умолчанию. Можно указать другое значение веса только в командной строке.
Если модель имеет векторные сигналы, целевая функция равна сумме интегральных ошибок для каждого сигнала:
Метод градиентного спуска (Gradient Descent Method)
Метод градиентного спуска использует функцию fmincon из приложения Optimization Toolbox™ для оптимизации параметров модели. Основывается на движении вдоль градиента функции в сторону локального экстремума (минимума или максимума). Требует вычисления частных производных. Наиболее простой в реализации из всех методов локальной оптимизации. Имеет довольно слабые условия сходимости.
72
ЛАБОРАТОРНАЯ РАБОТА №5
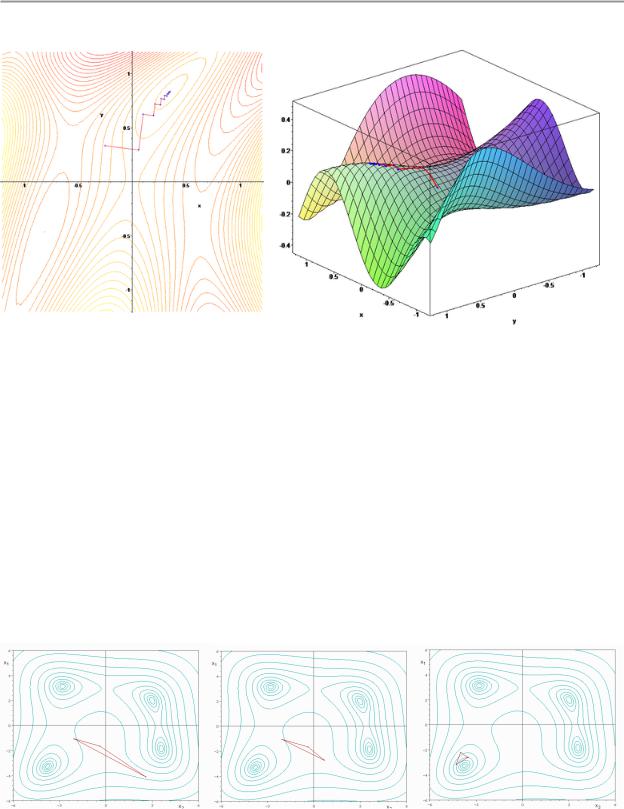
Поиск экстремума при градиентном методе.
Слева – линии уровня с траекторией поиска. Справа – поверхность с той же линией.
Метод симплекс поиска (Simplex Search Method)
Симплекс метод поиска экстремума использует функцию fminsearch и fminbnd из приложения для оптимизации параметров модели. Симплекс метод - метод безусловной оптимизации функции нескольких переменных, не использующий производные функции, а поэтому применим к негладким или зашумлённым функциям. Суть метода заключается в последовательном перемещении и деформировании симплекса вокруг точки экстремума. Симплекс или n-мерный тетраэдр (от лат. simplex — простой) — геометрическая фигура, являющаяся n-мерным обобщением треугольника.
На рисунке перемещение треугольника (симплекса) с деформацией в сторону экстремума. Отдельные кадры. Промежуточные изображения опущены.
73
ЛАБОРАТОРНАЯ РАБОТА №5
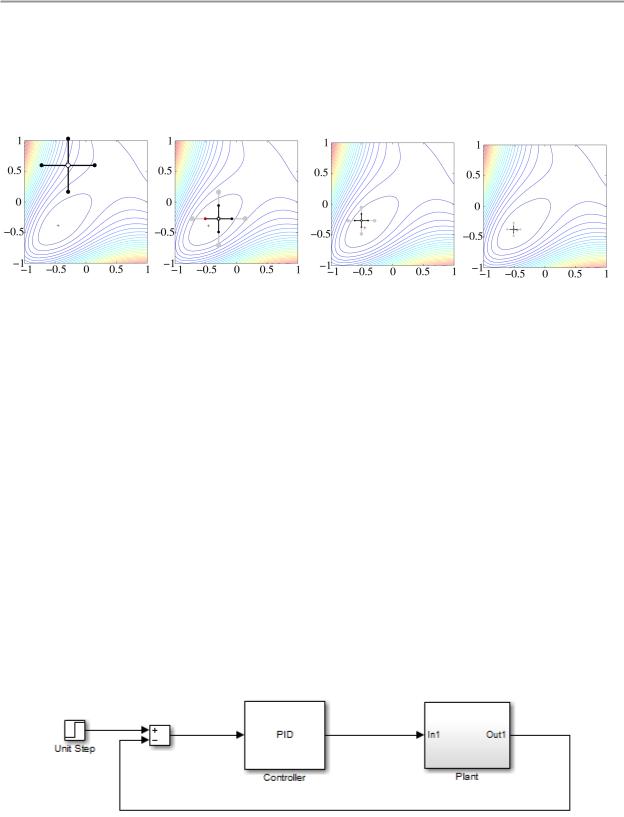
Метод поиска по шаблону (Pattern Search Method)
Метод поиска по шаблону (pattern) использует функцию patternsearch из Global Optimization Toolbox™ для оптимизации параметров модели.
Последовательность поиска экстремума по шаблону.
Если традиционные алгоритмы оптимизации используют информацию о градиенте для поиска оптимальной точки, то метод поиска по шаблону их не использует. Метод поиска по шаблону выполняет задачи оптимизации с линейными и нелинейными ограничениями и не требует дифференцируемости или непрерывности функции.
ДОПОЛНЕНИЕ 2
Оптимизация по переходной характеристике
Этот пример показывает, как оптимизировать параметры регулятора для удовлетворения условий проекта с помощью инструмента оптимизации проекта. Вы указываете проектные требованиям в блоке Check Step Response Characteristics.
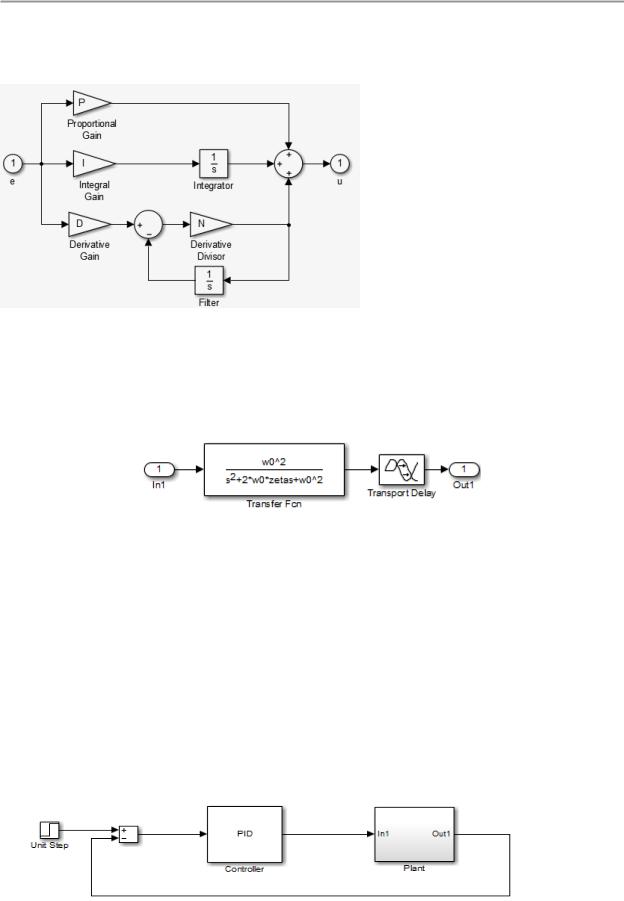
Структура модели
Модель включает в себя следующие блоки:
74
ЛАБОРАТОРНАЯ РАБОТА №5
Блок Controller (контроллера), который является ПИД-регулятором. Этот блок контролирует выходной сигнал подсистемы Plant.
Параметры PID регулятора обозна-
чим P = Kp; I = Ki; D = Kd; N = 100. В командном окне Matlab вводим начальные значения варьируемых параметров Kp = 1; Ki = 0; Kd = 0.
Блок Unit Step подает на вход ступенчатый сигнал для получения на выходе модели переходного процесса, который должен удовлетворить соответствующим требованиям.
Можно также использовать другие типы входных сигналов таких как линейно нарастающий, синусоида и пр., чтобы оптимизировать реакцию в соответствии с требованиями.
Plant subsystem представляет собой систему второго порядка с задержкой. Она содержит передаточную функцию и блок задержки.
w0=0.5; |
zeta=0.5; задержка Transport Delay 1 c. |
Требования проекта
Выход должен соответствовать следующим требованиям к переходной функции:
Время нарастания менее 2.5 секунд Время переходного процесса менее 30 секунд Перерегулирование менее 5%
Ввод требований к переходной функции
1. Строим модель, вводим параметры.
75
ЛАБОРАТОРНАЯ РАБОТА №5
2. Добавляем блок Check Step Response Characteristics. |
|
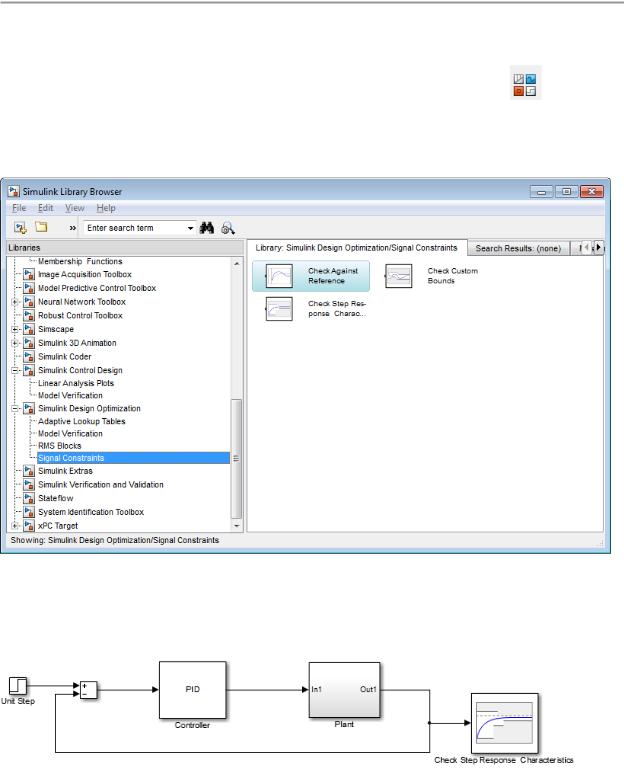
а) В окне модели Simulink выбераем View > Library Browser или |
. |
б) В панели Libraries (библиотеки) развертываем узел Simulink Design |
|
Optimization и выбераем Signal Constraints (ограничение сигналов). |
|
в) Перетаскиваем блок Check Step Response Characteristics в окно модели.
г) Подключаем блок к выходу.
Нужно подключить блок к сигналу, для которого необходимо указать требования проекта.
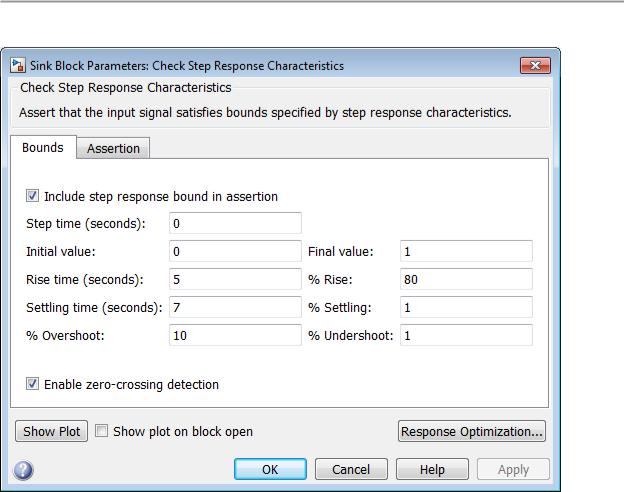
3.Дважды щелкаем блок Check Step Response Characteristics, открываем диалог Sink Block Parameters.
76
ЛАБОРАТОРНАЯ РАБОТА №5
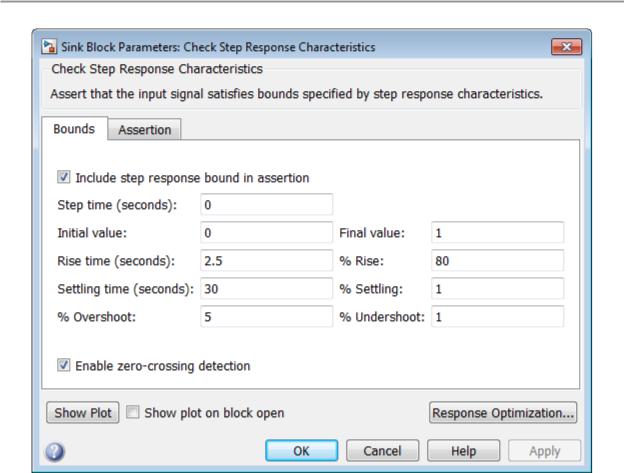
4.Определяем требования к переходной функции:
ВRise time (seconds) (время нарастания (секунды)), вводим 2.5
ВSettling time (seconds) (время переходного процесса (в секундах)), вводим 30
В% Overshoot (% перерегулирования), вводим 5
77
ЛАБОРАТОРНАЯ РАБОТА №5
5. Нажимаем кнопку ОК.
Вместо указаний требованиям во временной области в блоке Check, можно задать их в
Design Optimization tool без добавления блоков. Для примера смотрите Specify Reference Signal.
Определение переменных проекта
При оптимизации ответа модели, программа изменяет величины переменных проекта (параметры) для удовлетворения требованиям проекта.
1. В окне модели Simulink, выбираем Analysis > Response Optimization.
В качестве альтернативы, нажмите Response Optimization в диалоговом окне Block Parameters (параметры блока).
Откроется Design Optimization tool для модели.
78
ЛАБОРАТОРНАЯ РАБОТА №5
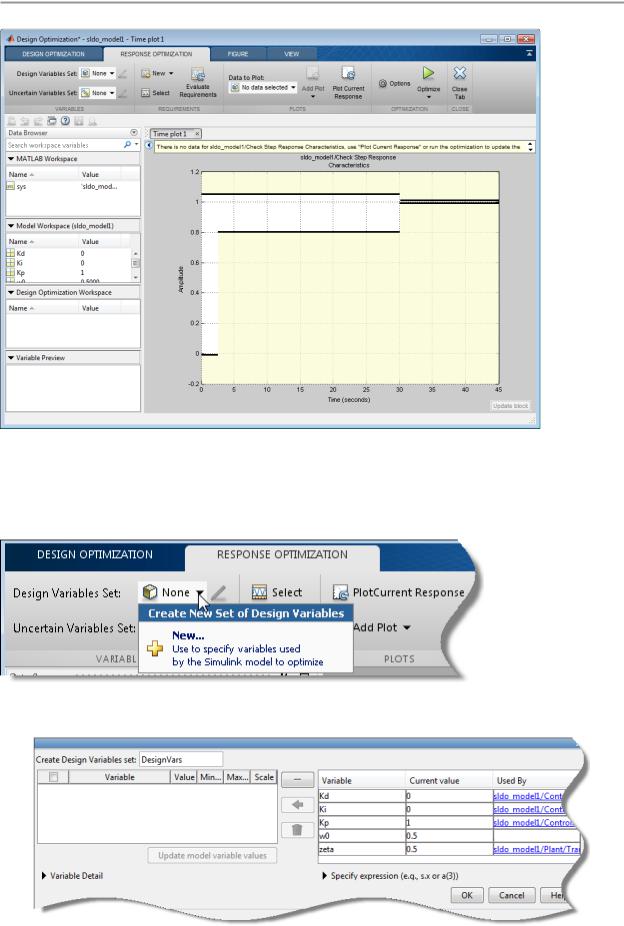
Амплитуда от времени графически показывает требования к переходной характеристике указанные в блоке Check Step Response Characteristics.
2. Выбераем New… в Design Variables Set, установленные в раскрывающемся списке.
Откроется окно, в котором вы укажете переменные проекта.
79