

3306
.pdfЛАБОРАТОРНАЯ РАБОТА №1
В целях демпфирования собственных колебаний усилителя возможно включение в поперечную ветвь резистора R.
Помимо рассмотренных регуляторов в практике электропривода находят применение и другие более сложные регуляторы.
30
ЛАБОРАТОРНАЯ РАБОТА № 2
СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
SIMULINK CONTROL DESIGN.
ПРОЕКТИРОВАНИЕ РОБАСТНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ ПИД КОНТРОЛЛЕРА
Simulink Control Design позволяет пользователю проектировать и анализировать системы управления, которые были ранее смоделированы в Simulink.
ВSimulink Control Design есть графический интерфейс пользователя для настройки контуров управления непосредственно в Simulink при помощи возможностей Control System Toolbox. Можно использовать любую архитектуру регулятора, которая построена в Simulink и является линеаризуемой.
Внастраиваемые блоки Simulink входят Gain (Усиление), Transfer Function (Передаточная функция), Zero-Pole (Нули-полюса), State-Space (Пространство состояний) и PID Controller (ПИД-регулятор).
Simulink Control Design выполняет автоматическую идентификацию соответствующих регулируемых контуров для настраиваемых блоков и запускает предварительно сконфигурированный сеанс SISO Design Tool (Инструмент для разработки систем типа один вход/один выход).
Основные возможности
Автоматическая настройка блоков из библиотеки Simulink типа PID controller (ПИДрегулятор)
Возможность быстрого расчёта рабочей точки (подгонка) и линеаризации моделей Simulink
Расчёт частотных характеристик Simulink-модели с использованием симуляции
Графическая и автоматизированная настройка произвольных систем управления в Simulink
Оптимизация регуляторов численными методами (с использованием Simulink Design Optimization™) для удовлетворения требований к системе во временной и частотной областях
Интерфейс командной строки для развития скриптов автоматической линеаризации и выполнения пакетной линеаризации
Для двигателя предыдущей лабораторной работы (ЛР1) спроектировать робастную систему автоматического регулирования ДПТ.
1.Спроектировать систему стабилизации скорости, используя приложение SISO Design (см. приложение).
2.Параметры двигателя и требования к системе заданы в таблице к лабораторной работе №1.
3.Насколько робастность ухудшает качество переходного процесса?
31
ЛАБОРАТОРНАЯ РАБОТА №2
4.Какой из предложенных методов настройки дает лучший результат? Какой из методов предпочтительнее и почему?
5.Что такое антивидап метод?
Обратите внимание, что при данном подходе для SISO Design не нужно определять передаточную функцию объекта управления, поэтому можно настраивать ПИД регулятор, например, для двигателя с обратной связью по току или для еще более сложной системы. Кроме того, не обязательно использовать ПИД регулятор – можно спроектировать любое из перечисленных корректирующих устройств
ДОПОЛНЕНИЕ 1
Определение параметров PID контроллера с использованием робастного алгоритма настройки
В предыдущей лабораторной работе в качестве регулятора (корректирующего устройства) могло получиться достаточно сложное устройство. В данном случае используется стандартный ПИД регулятор, используя автоматизированный робастный алгоритм настройки по переходной функции. Этот метод настраивает коэффициенты усиления так, чтобы максимизировать полосу пропускания и оптимизировать пороговое значение фазы.
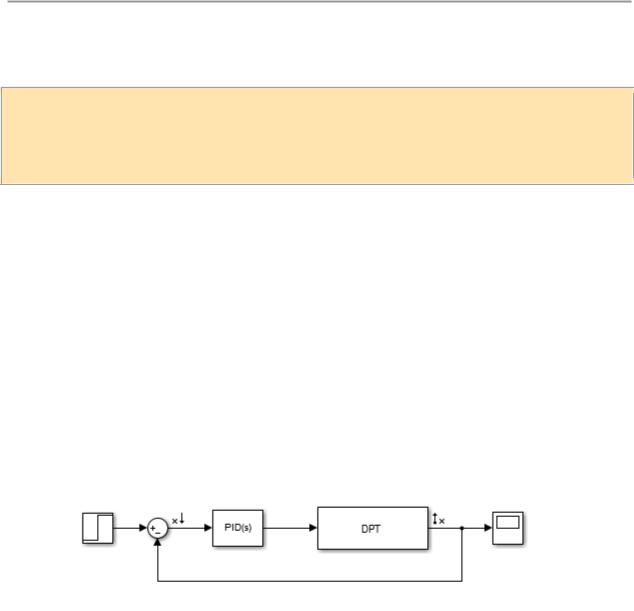
1. Создайте модель, показанную на следующем рисунке. Укажите точки входа и выхода для линейной системы.
2. Как и при построении частотных характеристик выберите Analysis> Control Design>
Control System Designer….
Это действие открывает Control and Estimation Tools Manager с выбранным узлом Simulink Compensator Design Task (задачи проекта компенсатора Simulink).
32
ЛАБОРАТОРНАЯ РАБОТА №2
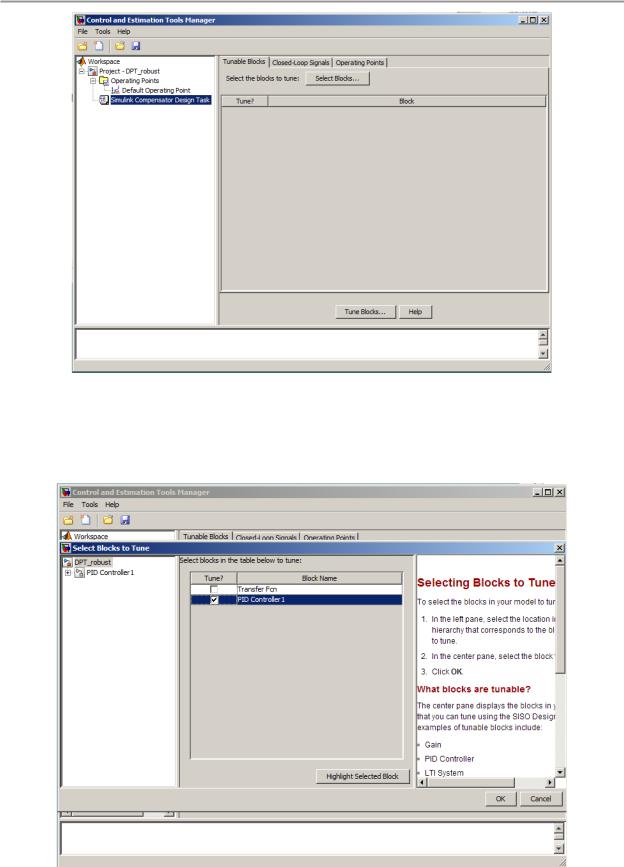
3.Выберите блок PID контроллера для настройки.
a.На вкладке Tunable Blocks нажмите Select Blocks.
Это действие открывает окно Select Blocks to Tune.
b.Выбрать Tune? флажок для PID контроллера.
d.Нажмите «OK».
33

ЛАБОРАТОРНАЯ РАБОТА №2
4.Определите системы с обратной связью, для которых Вы хотите проанализировать ответ.
Точки ввода и вывода уже определены в модели с обратной связью.
В Control and Estimation Tools Manager нажмите Tune Blocks, чтобы открыть Design Configuration Wizard. Нажать Next.
5.Шаг 1 Design Configuration Wizard предлагает Вам выбирать графики проекта, которые
Вы будете использовать, чтобы настроить контроллер. Примите настройки по умолчанию и нажмите Next..
6. Шаге 2 в Design Configuration Wizard определите тип графика для анализа ответа. а. В области Analysis Plots выберите Step для Plot Type, соответствующего
Графику 1.
b.В разделе Plots области Contents in Plots выберите 1 для Closed Loop и т.д.
34

ЛАБОРАТОРНАЯ РАБОТА №2
7. Нажмите Finish.
Программа выполняет следующие действия:
a.Линеаризует модель Simulink в рабочей точке, определенной в модели.
b.Создает узел SISO Design Task под узлом Simulink Compensator Design Task.
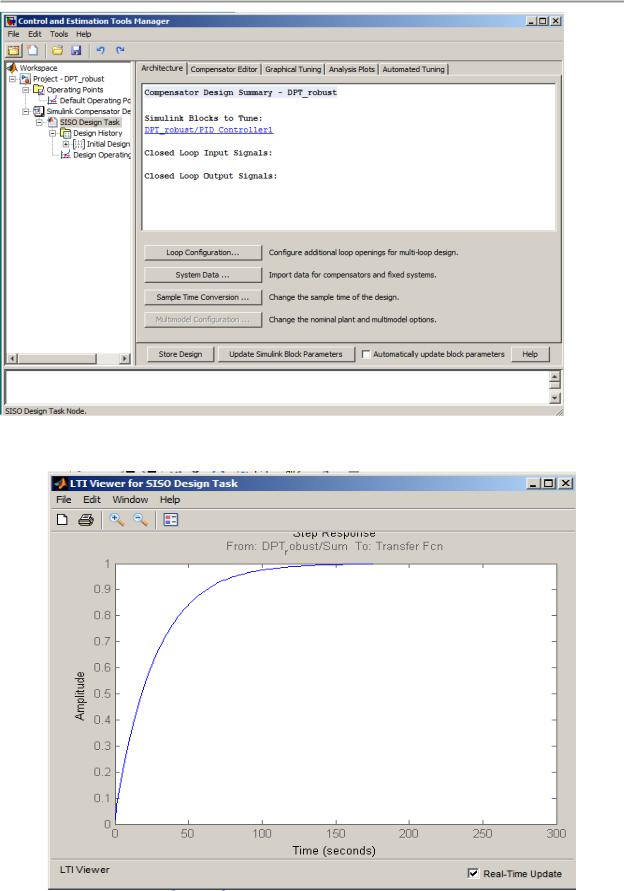
Открывает следующие окна графики:
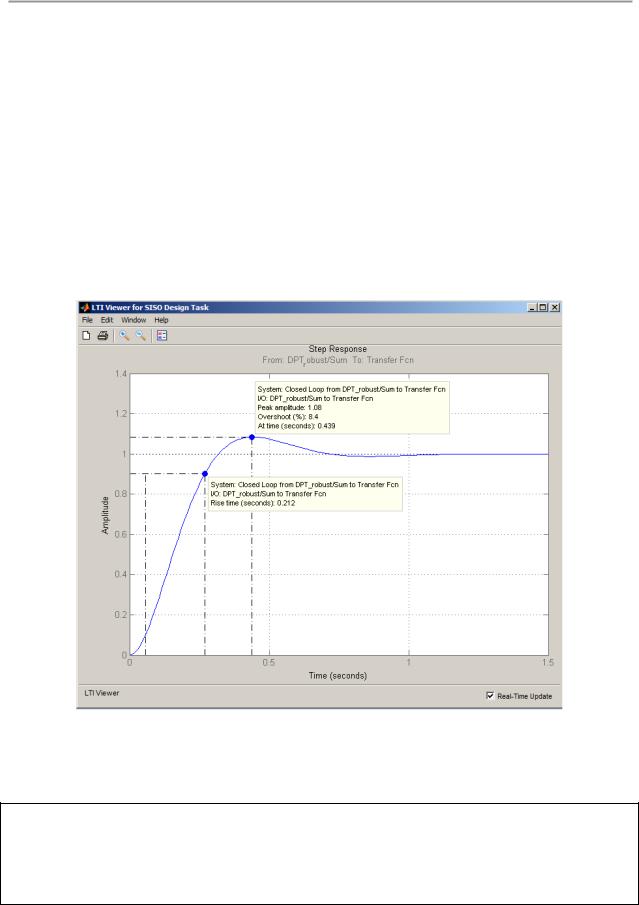
LTI Viewer - средство просмотра для окна SISO Design Task, которое показывает график переходной функции – ответ на единичный скачок - Step Response линеаризованной модели с обратной связью.
SISO Design - проект SISO для окна SISO Design Task, которое пусто.
Вы не используете это окно в этом разделе. Сохраните это окно открытым для следующего раздела.
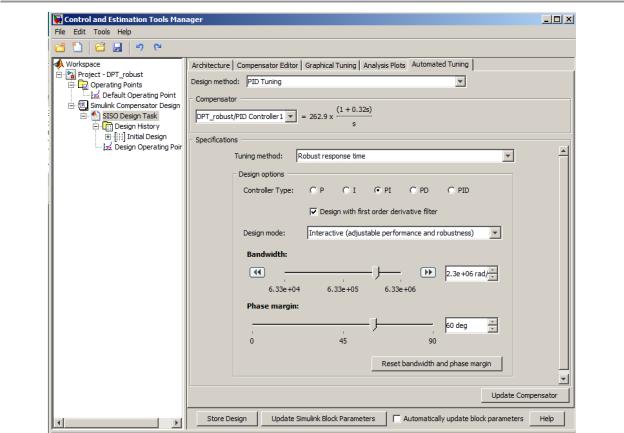
Менеджер Control and Estimation Tools напоминает следующим рисунком.
35
ЛАБОРАТОРНАЯ РАБОТА №2
График Step Response показывает переходный процесс, который не удовлетворяет конструктивным требованиям.
36
ЛАБОРАТОРНАЯ РАБОТА №2
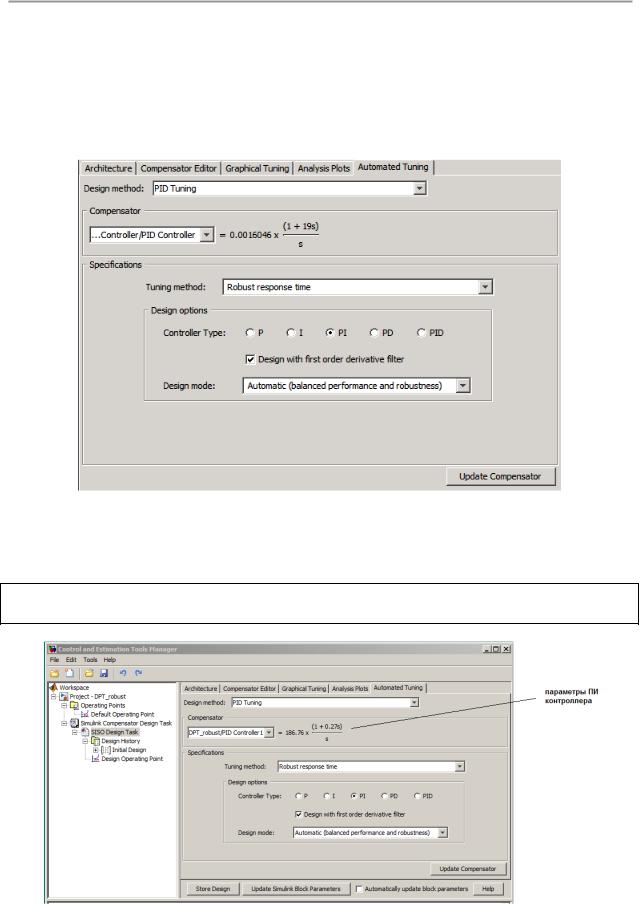
8.На вкладке Automated Tuning узла SISO Design Task в Control and Estimation Tools Manager
выберите PID Tuning как Design method.
9.В области Specifications выберите следующие опции:
Controller type (тип контроллера): PI
Tuning method (метод настройки): Robust response time (робастный переходный процесс)
10.Нажмите Update Compensator.
Это действие вычисляет значения PI компенсатора, используя робастный настраивающий алгоритм переходного процесса и обновляет график переходной функции (Step Response).
ЗАМЕЧАНИЕ Вы можете просмотреть значения PI на вкладке Parameter вкладки
Compensator Editor в узле SISO Design Task.
37
ЛАБОРАТОРНАЯ РАБОТА №2
11. Оцените, удовлетворяет компенсатор конструктивные требования, анализируя перерегулирование и время нарастания, следующим образом:
а. Щелкните правой кнопкой по графику переходной функции и выберите следующие опции:
Characteristics > Peak Response Characteristics > Rise Time
Эти действия добавляют маркер графику для каждой особенности, показанной как синие точки.
12. Щелкните левой кнопкой по каждой синей точке, чтобы открыть соответствующий маркер данных.
Маркеры данных показывают следующие динамические характеристики:
Перерегулирование составляет 8.4%. Время нарастания составляет 0.212 секунды.
Этот системный ответ с PID компенсатором превышает максимальное перерегулирование 5%. Время нарастания значительно меньше, чем необходимое время нарастания 0.5 секунды.
ЗАМЕЧАНИЕ Вы можете изменить время нарастания, регулируя полосу пропускания контура. Во-первых, в окне Control и Estimation Tools Manager в меню Design Mode выберите
Interactive (adjustable performance and robustness). Затем переместите ползунок Bandwidth
(полоса пропускания). Наконец, нажмите Update Compensator, чтобы просчитать новые параметры компенсатора для новой полосы пропускания модели:
38
ЛАБОРАТОРНАЯ РАБОТА №2
График переходного процесса после изменения Перерегулирование составляет 3.43%.
Время нарастания составляет 0.351 секунды.
39