

3306
.pdfЛАБОРАТОРНАЯ РАБОТА №2
ДОПОЛНЕНИЕ 2
Проектирование PID регулятора с использованием графической настройки Bode
Графическая настройка Bode позволяет разработать компенсатор изменением диаграммы Bode разомкнутого контура. Этот процесс также вызывают формированием контура.
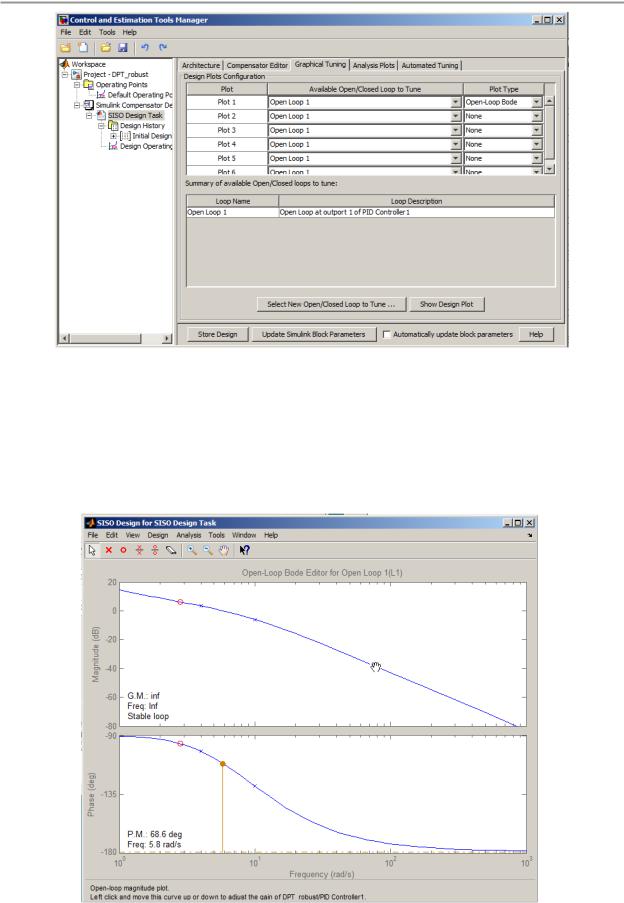
1. В Control and Estimation Tools Manager выберите вкладку Graphical Tuning узла SISO Design Task.
2. В ячейке Plot Type, которая соответствует Графику 1, выберите Open-Loop Bode и Show Design Plot.
40
ЛАБОРАТОРНАЯ РАБОТА №2
Это действие создает график Боде разомкнутого контура в SISO Design for SISO Design Task. Этот график показывает АЧХ и ФЧХ (графики Боде) линеаризованной модели с компенсатором, разработанным, используя автоматизированную PID настройку.
3. В окне SISO Design смещайте амплитудно-частотную характеристику Боде, чтобы изменить усиление и изменяя положение нуля (коэффициента усиления интегратора), просматривая влияние изменений на график переходной характеристики системы с обратной связью.
41
ЛАБОРАТОРНАЯ РАБОТА №2
Изменяя усиление, изменяем полосу пропускания и вид переходного процесса. Один из возможных проектов компенсатора, который отвечает предъявленным требованиям:
P = 48.842
I = 137.33 D = 0
ЗАМЕЧАНИЕ Вы можете просмотреть значения параметра, соответствующие регулировке усиления, которую Вы сделали в амплитудно-частотной характеристике на вкладке Compensator Editor SISO Design Task. Вы можете также изменить значения параметров на этой вкладке.
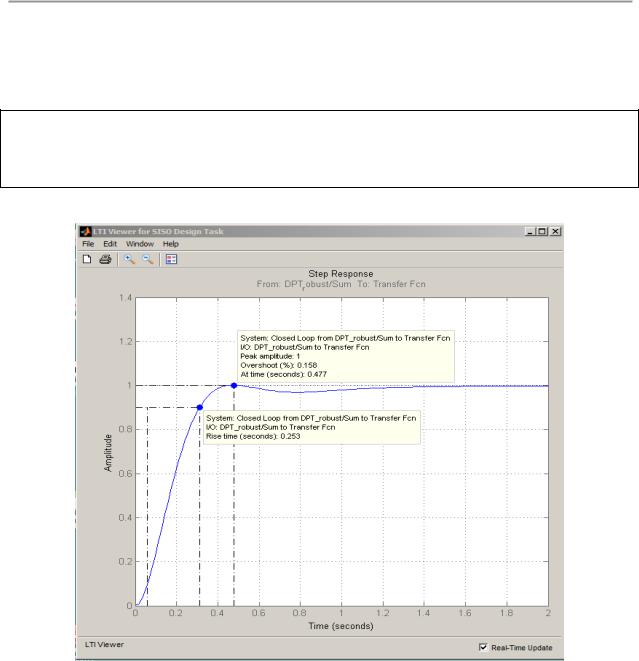
4. Переходная характеристика:
Перерегулирование составляет 0,158%. Время нарастания составляет 0.253 секунды.
5. Этот проект компенсатора удовлетворяет конструктивным требованиям: меньше 5% перерегулирование и меньше 0.5 секунды время нарастания.
Проверка робастности
Как известно, робастные (грубые) системы отличаются тем, что небольшое изменение параметров мало влияет на переходный процесс. В данном случае могут меняться сопротивление ротора двигателя R и момент инерции нагрузки J. Примем, что сопротивление изменяется на ±10%, а момент инерции на ±50%.
42

ЛАБОРАТОРНАЯ РАБОТА №2
К сожалению, автоматическую проверку влияния изменения параметров на работу системы можно провести только в пакетном режиме, задавая определенные команды. Проще проверить непосредственно, изменяя варьируемые параметры, но это займет больше времени. Вообще, пакетный режим обладает большими возможностями, но требует дополнительного изучения команд, программирования и организации программ. Для примера с ДПТ параметры двигателя R = 2 Ом и J = 0.02 кгм2/с2.
Идея учета изменения параметров заключается в следующем: в рабочей области для параметров R = 2±10% Ом и J = 0.02±50% кгм2/с2 создается массив параметров:
R = [2,1.8,2.2];
J = [0,02, 0,03, 0,01];
В блок-схеме обязательно должны быть указаны точки входа  и выхода
и выхода  линеаризации, хотя в данном случае система линейная, и записана на диск в виде файла, например, DPT_robust. Представляем систему как модель
линеаризации, хотя в данном случае система линейная, и записана на диск в виде файла, например, DPT_robust. Представляем систему как модель
mdl = 'DPT_robust';
Получаем, так называемый, дескриптор рабочей модели
hws = get_param(mdl,'modelworkspace');
Проводим линеаризацию входа/выхода модели
io=getlinio(mdl);
и организуем цикл со значениями параметров резистора и момента инерции
ct=1; clear sys
for ct1=1:numel(J) for ct2=1:numel(R)
%Запись параметров R и J модели в рабочую область (workspace) hws.assignin('J',J(ct1));
hws.assignin('R',R(ct2));
%Линеаризация модели
sys(:,:,ct)=linearize(mdl,io);
ct=ct+1;
end
end
Теперь есть набор моделей и для проектирования контроллера используем SISO Design Tool
sisotool(sys)
В результате появляется окно SISO Design с корневым годографом и ЛЧХ разомкнутой системы
43
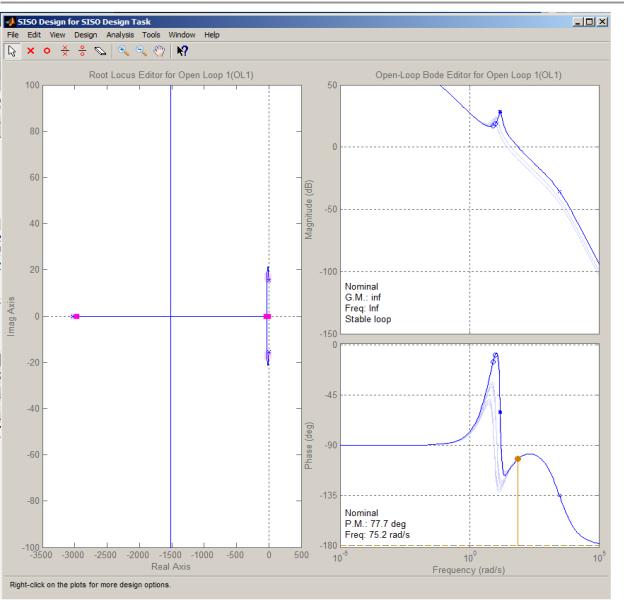
ЛАБОРАТОРНАЯ РАБОТА №2
Бледными линиями построены характеристики с измененными параметрами. Для построения переходной характеристики в области Analysis Plots выбераем Step для Plot Type, соответствующего Plot 1, а в разделе Plots области Contents in Plots выбераем 1 для Closed Loop.
В появившемся окне LTI Viewer няем последовательность
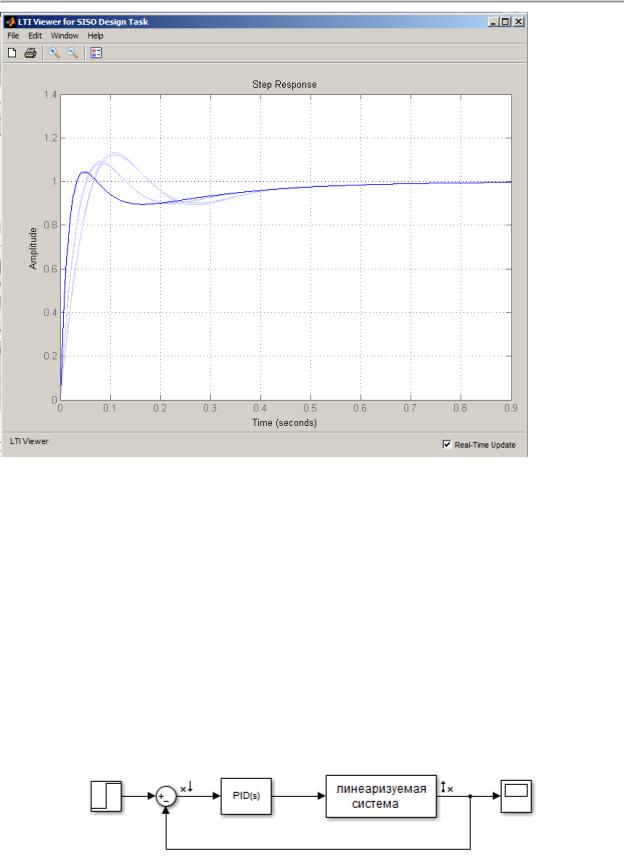
ЛАБОРАТОРНАЯ РАБОТА №2
Из графиков видно, что изменение момента инерции приводит к увеличению перерегулирования. Настройка была произведена по наименьшему значению момента инерции, поэтому задав первым в массиве среднее значение, можем улучшить регулирование. Можно непосредственно, перемещая линии по диаграмме Боде или точки на корневом годографе, изменять настройки, но это будет относится не PI контроллеру, а компенсатору, который автоматически вводится SISO Design по установленной архитектуре (см. Лабораторную работу №1). Правда, пересчитать это для PI контроллера не сложно.
ДОПОЛНЕНИЕ 3
Непосредственная настройка PID контроллера
Предусмотрена и непосредственная настройка PID контроллера, однако, схема, для которой гарантируется правильная работа, достаточно простая
Встроенный PID контроллер имеет много приложений и не сводится к сумме пропорционального, интегрального и дифференцирующего звеньев. В частности он имеет робастную настройку для указанной системы регулирования.
45
ЛАБОРАТОРНАЯ РАБОТА №2
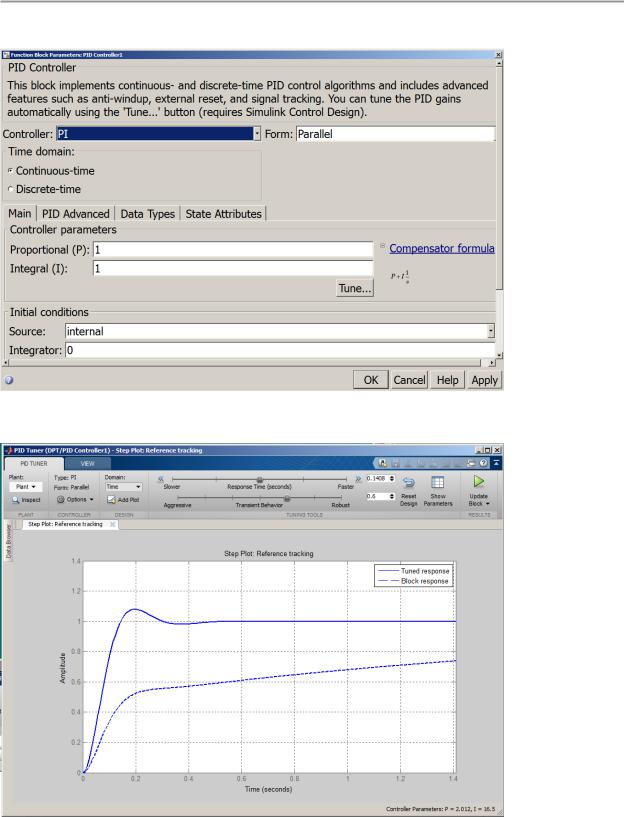
Открываем PID контроллер
В строке Controller выделяем PI. Открываем Tune…
В открывшемся окне два графика исходный – пунктир – и настроенный по робастному алгоритму – сплошная линия. Так же можно добавить маркеры, которые дают
перерегулирование 8% время нарастания 0.0955 с.
46
ЛАБОРАТОРНАЯ РАБОТА №2
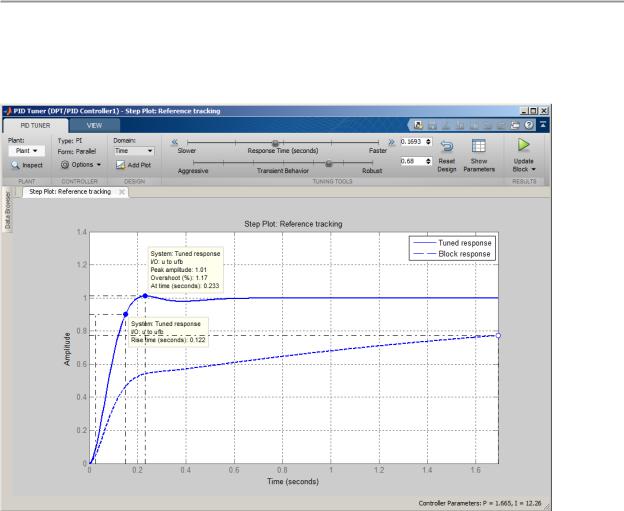
Чтобы уменьшить перерегулирование, переместим движки Response Time и Transient Behavior. В результате получаем перерегулирование 1.17% и время нарастания 0.122 с. Чтобы увидеть параметры PI регулятора, щелкаем Show Parametrs, а для ввода этих параметров в
PI контроллер ► Update Block. В блоке PID Controller читаем Р = 1.66 и I = 12.26.
ДОПОЛНЕНИЕ 4
Эффект насыщения. Антивиндап
“Известен ряд катастроф летательных аппаратов, вызванных неправильным синтезом алгоритмов управления: катастрофы американского многоцелевого истребителя YF-22 «Раптор», который потерпел аварию при посадке на авиабазе Эдварде в апреле 1992 года и шведского истребителя «Грифон». Эти катастрофы были вызваны неправильным син- тезом алгоритмов управления, которое производилось без учета нелинейностей типа «насыщение», влияние которых может вызвать так называемые «колебания, вызванные летчиком» (англ. Pilot Induced Oscillations), нарушающих процесс пилотирования. … Хорошо также известны случаи входа космического аппарата в неконтролируемое вращение.
Особенно наглядно представить возникновение нежелательных ситуаций можно в случае если система описывает объект управления в виде «чистого» интегратора с ограничением типа насыщения но входу, охваченного отрицательной обратной связью с ПИили ПИДрегулятором. В этом случае, ошибка управления интегрируется регулятором, но при больших рассогласованиях она не может парироваться из-за наличия насыщения. Это приводит к появлению в системе колебательных процессов, соответствующих максимально возможным амплитудам входного воздействия для объекта управления (интегратора).
47
ЛАБОРАТОРНАЯ РАБОТА №2
В англоязычной научной литературе это явление получило название «виндап» (от англ. «wind ир» заводить, приводить в возбужденное состояние, взвинчивать). Соответственно, меры по противодействию этому явлению путем введения дополнительных обратных связей и или компенсаторов, именуются «антивиндап» (англ. anti-windup, AW).” [Дифференциальные уравнения и процессы управления. №3, 2012. Электронный журнал.]
Это явление наблюдается повсеместно, где есть насыщение, например, в судовождении. “Управляющий сигнал уже достиг предельного значения, а интегратор продолжает интегрировать («наматывать», windup) ошибку, хотя увеличивать управление уже нельзя. Когда ошибка изменит знак, потребуется переложить руль в другую сторону, но этого не произойдет, поскольку выход интегратора очень велик. В результате увеличивается перерегулирование и время переходного процесса. На практике такое поведение системы может оказаться недопустимым”.
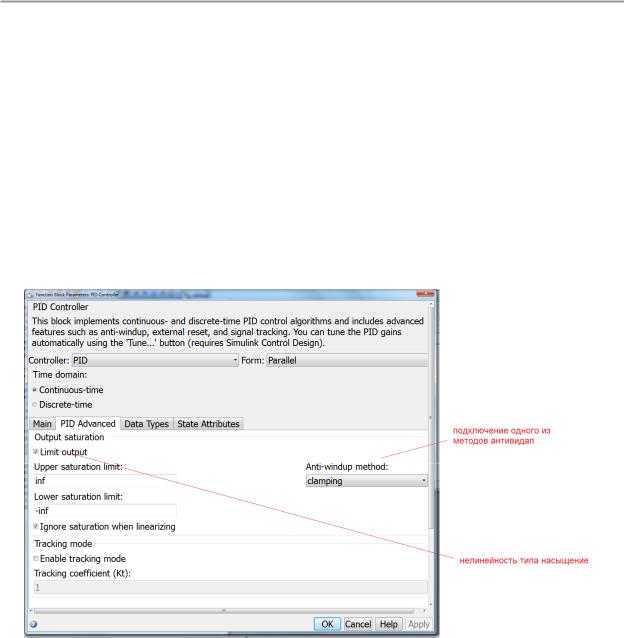
В PID регуляторе при наличии насыщения предусмотрен режим антивиндап
Настройки анти-виндап метода
none (по умолчанию)
Не используется анти-виндапный механизм. Эта установка может создать неограниченные внутренние сигналы блока, даже если выход, кажется, ограниченным пределами насыщения. Это может привести к медленному восстановлению от насыщения или к неожиданным переполнениям.
back-calculation
Сброс интегратора, когда выходное значение превышает насыщение блока с помощью контура обратной связи с соответствующим коэффициентом усиления:
48
ЛАБОРАТОРНАЯ РАБОТА №2
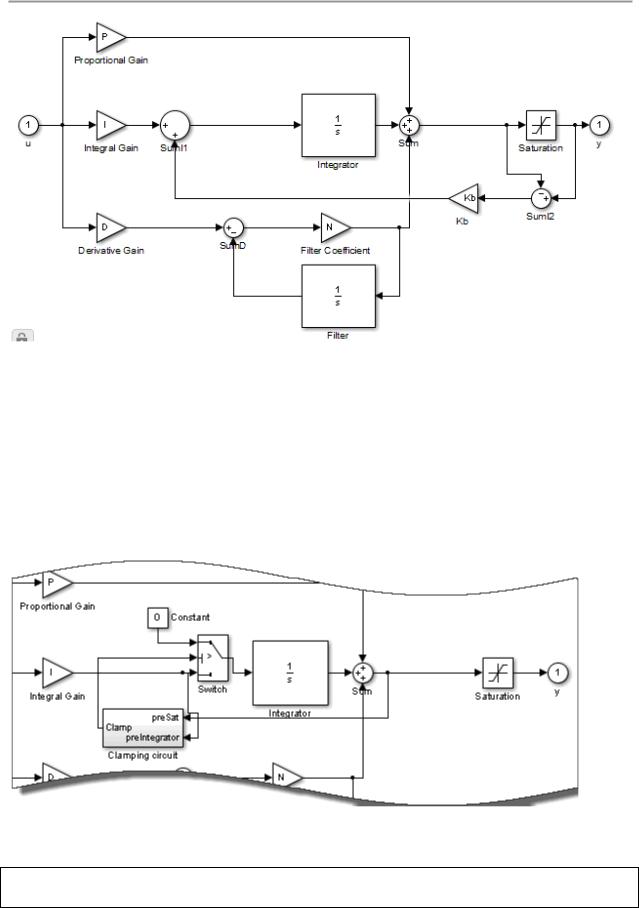
ПИД-регулятор с бэк-расчетом
Вы также можете указать значение для коэффициента back-calculation (Kb).
clamping (закрепление)
Останавливает интеграцию, когда суммарное выходное значение превышает пределы ограничения и выход интегратора и вход имеют одинаковый знак. Интеграция продолжается, когда суммарное выходное значение превышает пределы ограничения и выход интегратора и вход имеют противоположный знак. Интегратор часть блока:
Сlamping цепи реализует логику, необходимую для определения, продолжать ли интегрирование.
Замечание Можно построить антивиндапную схему ПИД-контроллера из блоков
Simulink и настроить ее с помощью Simulink Design Optimization.
49