

3306
.pdfЛАБОРАТОРНАЯ РАБОТА № 3
СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
SIMULINK CONTROL DESIGN.
ПРОЕКТИРОВАНИЕ ДИСКРЕТНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Для регулирования скорости ДПТ используется микроконтроллер с аналого-цифровым преобразователем. Хотя тактовая частота контроллера порядка нескольких мегагерц, время обработки информации приводит к частоте дискретизации не более 100 кГц. Спроектировать цифровую систему автоматического регулирования ДПТ, представив ее в виде дискретной системы. Использовать параметры электрических двигателей лабораторной работы №1.
Проект
1.Спроектировать дискретную систему стабилизации скорости, используя приложение SISO Design (см. дополнения к данной работе и к лабораторной работе 1). Требование к системе: отсутствие перерегулирования; точность не менее 1%; время переходного процесса не более 2 времен естественного переходного процесса двигателя.
2.Проверить путем моделирования спроектированную систему стабилизации скорости с использованием дискретного ПИД контроллера
а) спроектированную аналоговую САР с задержкой с ДПТ;
б) спроектированную систему в виде импульсной системы автоматического регулирования ДПТ с аналого-цифровым преобразователем. Обратите внимание на масштабирование величины сигнала на входе и выходе АЦП.
в) постройте систему регулирования с использованием MATLAB Function, имитирующей микроконтроллерное управление.
Насколько удался проект.
50

ЛАБОРАТОРНАЯ РАБОТА №3
ДОПОЛНЕНИЕ 1
Дискретизация модели
Цифровая микроконтроллер не может обрабатывать постоянно меняющиеся аналоговые данные. Поэтому, и сбор данных, и выработка управляющих сигналов происходят только в определенные моменты времени. Принципиально ничего не меняется при повышении скорости процессора. Более быстрый процессор работает по тому же принципу, что и более медленный, — он просто обрабатывает больше данных за тот же интервал времени, но данные при этом остаются дискретными.
При цифровом управлении непрерывный сигнал переводится в цифровой. Осуществляется это периодически с определенной частотой и называется выборкой, дискретизацией (sampling) или квантованием. Продолжительность интервала — временем (периодом, интервалом) выборки, дискретизации (sampling time) или квантования. В цифровых системах присутствует два типа квантования: квантование по времени и квантование по уровню.
Квантования по времени из аналогового сигнала выбираются его значения в моменты квантования, периодически через некоторый интервал T - период квантования. Частота квантования ωs = 2π/T. Все значения сигнала между моментами квантования игнорируются, т.е., при квантовании происходит потеря информации.
Квантование по уровню происходит в аналогово-цифровых преобразователях (АЦП) и из-за конечного числа двоичных разрядов (чаще всего от 8 до 16) на выходе АЦП можно получить только ограниченное число (256 для 8 разрядного ЦАП и 65536 для 16разрядного). При квантовании значения входного сигнала округляются. В цифровых системах не может быть только квантование по уровню – обязательно происходит еще и квантование по времени из-за дискретности цифрового описания.
Можно ли восстановить непрерывный сигнал по дискретным значениям? Существует теорема Котельникова-Шеннона: непрерывный сигнал теоретически может быть восстановлен по дискретным измерениям, если его максимальная частота ωmax меньше частоты Найквиста ωN = ωs/2, т.е. половины частоты квантования.
Восновном, дискретизация используется в двух целях:
1)ускорение процесса расчета при моделировании непрерывных систем;
2)моделирование реально дискретных и импульсных систем.
Работа MatLab в режиме реального времени Real-Time Windows Target (когда часть реального устройства в виде математической модели, а часть в виде действующего механизма)
возможна только в дискретном режиме.
При дискретизации модели выборочно заменяют непрерывные блоки Simulink дискретными эквивалентными блоками. В Simulink большинство блоков непрерывные, но есть дискретные. В основе дискретных блоков лежит дискретное z-преобразование. Есть несколько способов перехода от непрерывных к дискретным, простейший - использование
Model Discretizer.
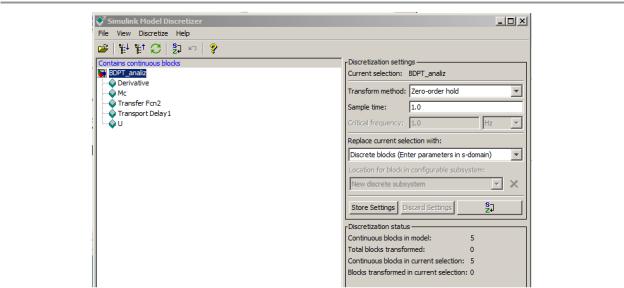
Дискретизация с помощью Model Discretizer
Открыть приложение, выбор Analysis>Control Design>Model Discretizer… для модели Simulink
51
ЛАБОРАТОРНАЯ РАБОТА №3
Определение метода перехода.
Определяет тип алгоритмов, используемых при дискретизации.
Список содержит следующие варианты:
zero-order hold (нулевой порядок)
Нулевой порядок входа.
first-order hold (первого порядка)
Линейная интерполяция входа.
tustin
Билинейная аппроксимация.
tustin с преддеформированием
Билинейная аппроксимация с частотным преддеформированием.
matched pole-zero
Метод нулевой опоры (только для SISO систем).
Опредение Sample time (времени дискретизации)
В поле Sample time нужно ввести требуемое эталонное время (время дискретизации), т.к. по умолчанию установлено 1 с.
Определение вида представления дискретного блока
Определите вид домена дискретизации в Replace current selection. Варианты:
Дискретные блоки в виде s-домена
Создает дискретный блок, параметры которого выглядят так же как в соответствующем непрерывном блоке.
Дискретные блоки в виде z-домена
52
ЛАБОРАТОРНАЯ РАБОТА №3
Создает дискретный блок, параметры которого выглядят в виде функций z – дискретного z-преобразования.
Подсистема: параметры в виде в s-домена
Подсистема: параметры в виде в z-домена
Переход к дискретному состоянию, например, непрерывной передаточной функции Transfer Fcn к дискретной передаточной функции Discrete Transfer Fcn производится одной и той же функцией c2d. Отличается их вид: в s-домене вид не меняется, добавляется значок на передаточную функцию, и возможность вернутся в любой момент к непрерывной передаточной функции даже после моделирования. В z-домене будет вид дискретной передаточной функции с переменной z и отсутствует возможность возврата к
Дискретизация блоков
Выберите блок или блоки модели в дереве Discretizer.
Примечание Вы должны выбрать блоки модели в дереве Discretizer. Щелчок на блоках в редакторе Simulink не выбирает их для дискретизации.
Щелкните кнопкой Discretize  .
.
Отказ от дискретизации (откат) - кнопка  .
.
Восстановление модели
Чтобы восстановить модель, щелкаете кнопкой Refresh  (в s-домене).
(в s-домене).
ПРИМЕР
Примечание Перед дискретизацией продублируйте собранную модель под другим именем, чтобы воспользоваться s представлением в случае потери.
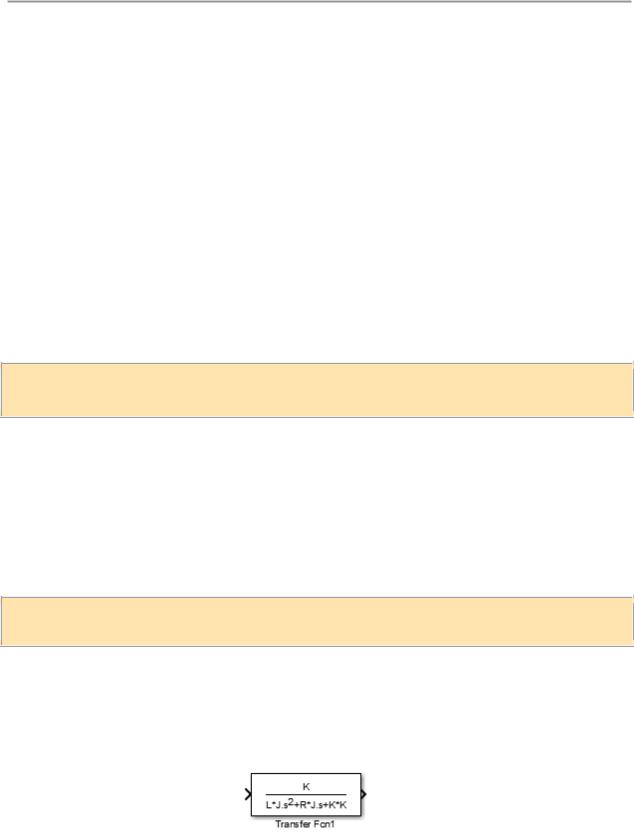
Двигатель постоянного тока имеет параметры: R = 0.219 Ом, L = 0.009 Гн, J = 0.5 кг.м2, U = 110 В, Iн = 41 А, Р = 4.2 кВт, n = 1145 об/мин, K =0.854.
Так как дискретизация может быть применена только к части линейных блоков Simulink и не применима к блокам SimPowerSystems, представим двигатель передаточной функцией
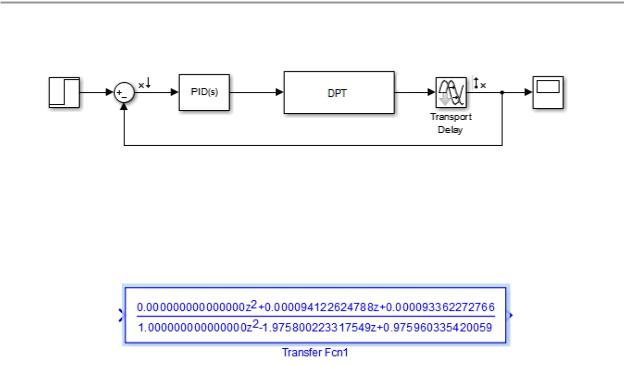
На новой странице строим систему регулирования с дискретным ПИД контроллером и передаточной функцией Transfer Fcn двигателя ДПТ, добавим задержку по времени Transport Delay датчика скорости. Если датчик скорости импульсный, то время задержки зависит от скорости двигателя и на больших оборотах оно не велико, но на малых оборо-
53
ЛАБОРАТОРНАЯ РАБОТА №3
тах весьма заметно и приводит или к колебаниям в системе или, вообще, к неустойчивости САР. В данном примере примем время задержки 0.001 секунды.
Далее нужно дисретизировать блоки схемы, т.е. записать их в дискретной форме, используя z-преобразование. Можно это сделать, воспользовавшись таблицами z- преобразований, аналогично преобразованию Лапласа, но можно гораздо проще, применив Model Discretzer. Используем метод дискретизации z-домена, метод перехода zeroorder hold (нулевого порядка). Эталонное время (Sample time) примем Ts = 1e-3 c. В результате получаем для двигателя
аналоговый блок задержки переводится в дискретную задержку. Обратим внимание на необходимость ввода точек входа и выхода при линеаризации системы.
Далее проектирование идет как и в ЛР2:
Открываем Control System Designer….
Analysis > Control Design > Control System Designer….
Открывается Control and Estimation Tools Manager. Далее последовательность действий:
Select Blocks… > Discrete PID Controller > OK
Затем Tune Blocks… > Next
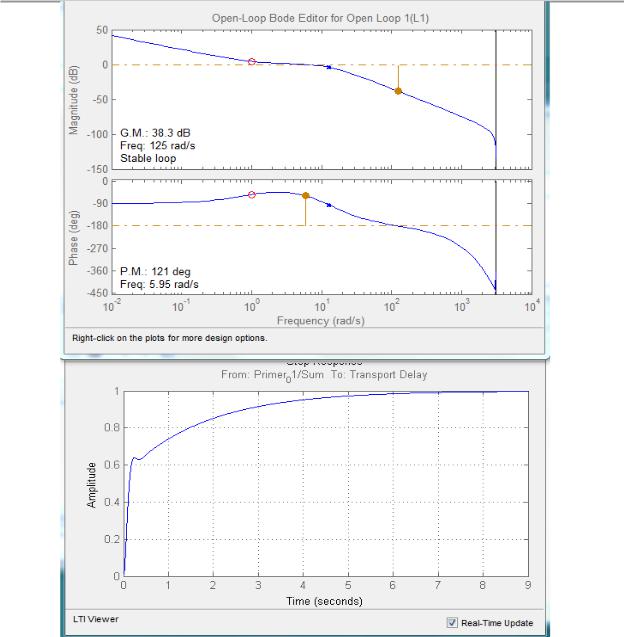
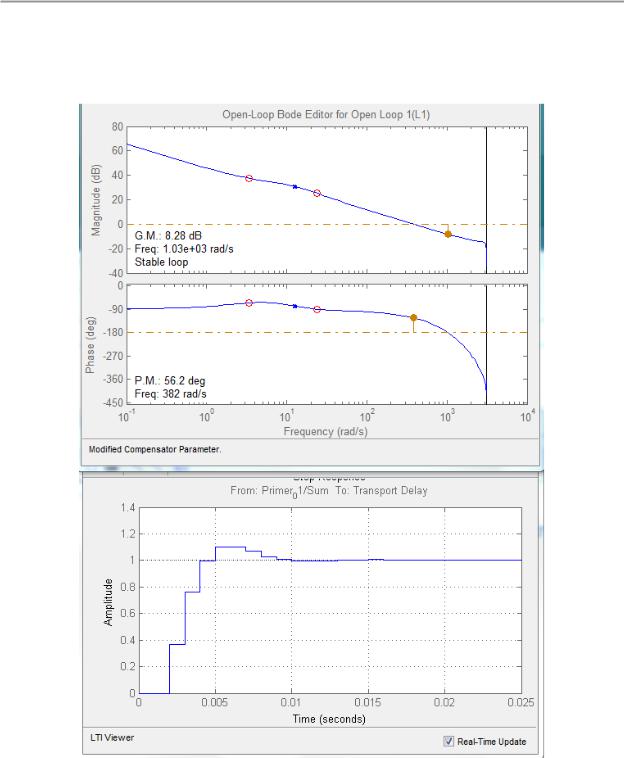
Строим ЛЧХ (диаграммы Боде) замкнутой системы и переходную характеристику
Plot 1 > Plot Type > Open-Loop Bode > Next
Plot 1 > Plot Type > Step > Contents of Plots > Plots > 1>Finish
В результате получаем следующие графики:
54
ЛАБОРАТОРНАЯ РАБОТА №3
Боде диаграмма выглядит необычно – упирается в вертикальную линию. Обратите внимание на ограничение частотных характеристик по частоте (вертикальная линия, на которой обрываются частотные характеристики). Это связано с дискретизацией и эталонным временем.
Теперь можно перемещая ЛАЧХ, изменяя коэффициенты усиления контроллера добиться качества переходного процесса. Можно добавить новые нули и полюса, усложняя корректирующее звено – контроллер. Но можно воспользоваться возможностями самого контроллера – запустить автоматическую настройку.
Открываем PID Controller > Tune. Появляется окно настройки PID Tuner с настроенными параметрами, в данном случае PID контроллера, и график переходного процесса замкнутой системы. Система устойчива, но задержка по времени остается. Перемещая движки
55
ЛАБОРАТОРНАЯ РАБОТА №3
Response Time и Transient Behavior, изменяем настройки и переходный процесс. Параметры контроллера Р = 55; I = 164; D = 2; N = 1915.
Переходная характеристика и диаграммы Боде настроенной замкнутой системы:
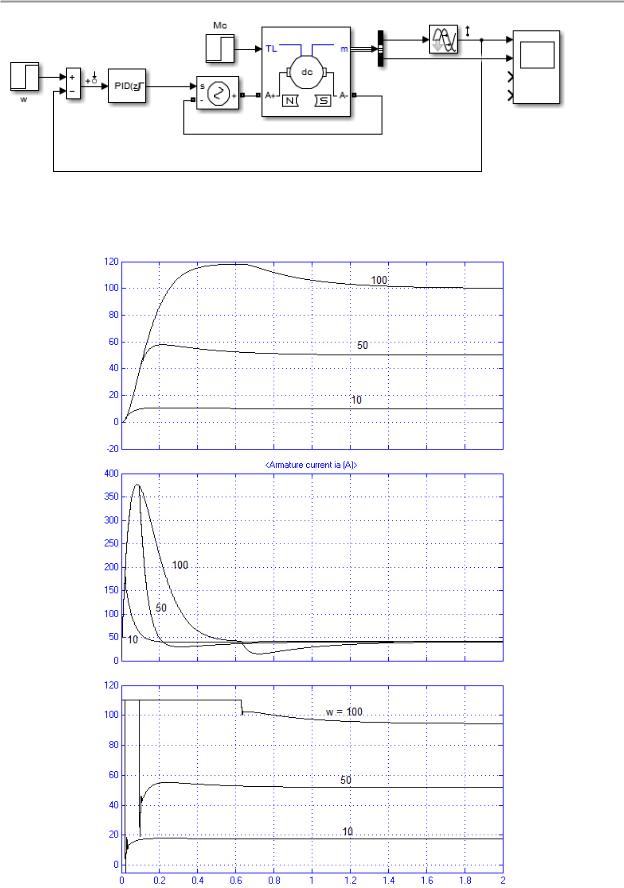
Проверим работу САР под нагрузкой:
56
ЛАБОРАТОРНАЯ РАБОТА №3
Скорость, ток и напряжение при пуске двигателя в системе автоматического регулирования при заданной скорости 10, 50, 100 рад/с при номинальной нагрузке Мс = 35 Нм
57
ЛАБОРАТОРНАЯ РАБОТА №3
Моделирование показывает, что с возрастанием скорости возрастает перерегулирование и качество переходного процесса неудовлетворительное. Это связано с ограниченным напряжением 110 В, к тому же слишком велик ток – почти в десять раз больше номинального. Изменение коэффициентов Р = 550 и I = 16 улучшает переходный процесс, но ток по прежнему недопустимо велик.
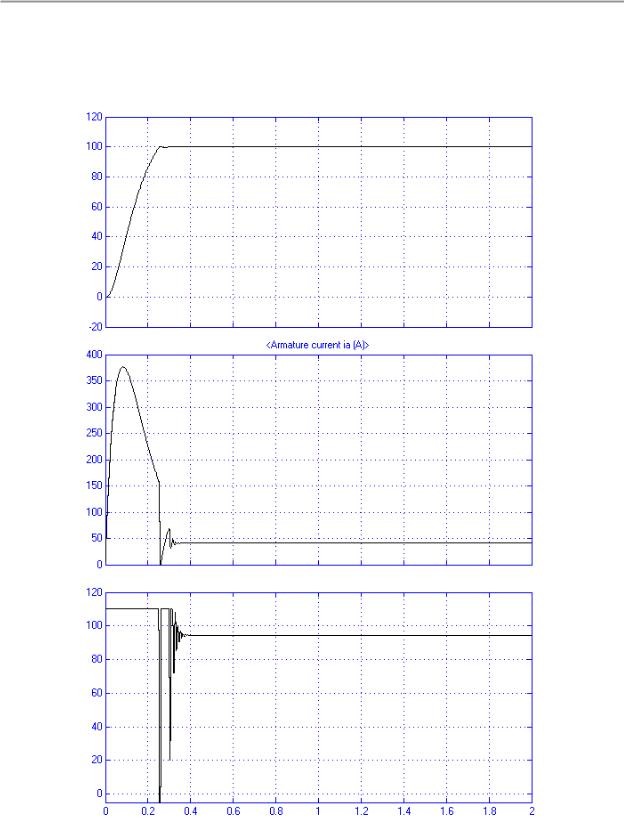
Для ограничения тока следует ввести отрицательную обратную связь по току:
58
ЛАБОРАТОРНАЯ РАБОТА №3
P - контроллер имеет коэффициент усиления 500 и ограничение напряжения 110 В. PID - контроллер P = 5000, I = 0, D = 20, N = 9820. Ограничение по току 150 А. Графики скорости (1 рад/с, 10 рад/с, 50 рад/с и 100 рад/с), тока и напряжения.
Обратите внимание, что в аналоговой системе получается импульсный режим – импульсный характер напряжения, практически полностью повторяющий широтно-импульсный преобразователь импульсной системы.
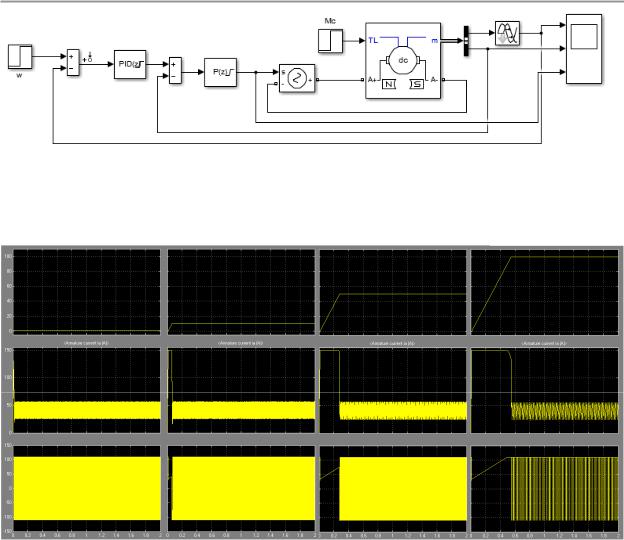
Строим полностью импульсную реверсивную систему с аналого-цифровыми преобразователями:
59