

3205
.pdfWs s hV |
cos |
|
Кд ( ); |
|
|
|
|
(16) |
|
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
sin cos( ) |
|
|
|
|
|
|
|
|
|
|||
Wsp s hV |
cos |
|
( ) ; |
|
|
|
(17) |
|
|
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
sin cos( ) |
|
|
|
|
|
|
|
|
|||
Wд s hV |
cos |
2 |
2D |
(18) |
|
|
|
|
|
|
|
|
||
|
|
cos 2 ( ) |
|
|
|
|
|
|
|
|
|
|
||
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
этих |
|
выра- |
|||
|
|
|
|
|
|
|
|
|
|
|
||||
10 |
|
|
|
|
|
|
|
|
|
|
жениях |
|||
|
|
|
|
|
|
|
|
|
|
Кд ( ) так- |
||||
8 |
|
D 1 |
|
|
|
|
|
|
же |
является |
||||
|
|
|
|
|
|
|
|
функцией |
||||||
6 |
|
|
|
|
|
|
|
|
|
неизвестного |
||||
|
|
0.5 |
|
|
|
|
|
|
угла |
|
|
|
со- |
|
|
|
|
|
|
|
|
|
|
гласно |
|
|
(6). |
||
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|||
4 |
|
|
|
|
|
|
|
|
На рис.5 |
по- |
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
0 |
|
|
|
казана |
|
зави- |
|||
f |
0.4 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
симость |
|
без- |
|||||
2 |
|
|
|
|
|
|
|
|
|
размерной |
||||
0 |
|
|
|
|
|
|
|
|
|
полной |
||||
|
|
|
|
|
|
|
|
|
|
мощности |
||||
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
|
|
W |
|
W |
||
|
s hV |
|||||||||||||
Рис.5. Зависимость относительной |
|
|
|
|
|
|||||||||
|
|
|
от , |
рассчи- |
||||||||||
|
|
мощности резания от угла |
|
|
|
|||||||||
|
|
|
|
|
танная |
|
|
по |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
(14) |
для |
|
раз- |
|
личных значений D. |
Как видно, при любых скоростях резания име- |
|||||||||||||
ется такое одно значение , при котором полная мощность мини- |
||||||||||||||
мальна. В соответствии с вариационными принципами механики |
||||||||||||||
процесс резания и будет протекать при таком . Для его определе- |
||||||||||||||
ния используем условие: |
|
|
|
|
|
|
|
|
|
|
|
|||
71

|
|
|
|
W |
0 , |
(19) |
|
|
|
|
|
которое после вычисления производной от функции (14) с учетом (6) после достаточнотрудоемких тригонометрических преоб-
разований сводится к трансцендентному относительно уравнению:
cos( 2 )cos 2 ( ) |
2D |
(20) |
||
sin( 2 2 ) sin2 |
cos |
|||
|
|
|||
|
|
|
|
Для |
0 |
|
|||
|
его |
ре- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
шение методом |
||||||
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
итераций |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
представлено |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
графиками |
на |
|||
35 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис.6. Как вид- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f 0 |
|
|
|
но, |
с |
ростом |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорости реза- |
|||||||
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния |
всегда |
на- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
блюдается |
|||
|
|
|
|
|
f |
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уменьшение |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
угла , а зна- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чит увеличение |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
20 |
|
|
|
|
|
|
|
|
f |
1 |
|
|
|
|
|
|
коэффициента |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
усадки |
струж- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ки и ее толщи- |
||||
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ны. При мед- |
||||
0 |
0.2 |
0.4 |
0.6 |
0.8 |
|
|
D |
|||||||||||||||||
Рис.6. Зависимость угла от параметра |
|
|
ленном (стати- |
|||||||||||||||||||||
|
|
ческом) |
реза- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нии |
( D 0 ) |
|||
|
|
динамического давления D |
|
|
значение |
|
|
|||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
совпадает |
|
с |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
известным |
ре- |
|||
|
|
|
|
|
|
|
|
|
|
|
72 |
|
|
|
|
|
|
|
|
|
|
|
||
шением 2 |
|
. Действительно при условии D 0 т.к. |
|||
2 |
|||||
|
|
|
|
||
cos 2( ) 0 |
(случай |
|
не имеет физического смыс- |
||
|
|
|
2 |
|
|
ла) имеем указанное известное решение cos( 2 ) 0 .
На рис.8 представлен пример зависимости безразмерной полной мощности резания и ее составляющих от параметра D. Как видно, с ростом D все составляющие возрастают практически по линейной зависимости.
Представленная в данной работе модель динамического резания является простейшей, т.к. не учитывает многие явления резания, в частности деформационное упрочнение и термическое разупрочнение срезаемого материала при пластическом деформировании в плоскости разрыва скоростей. Однако она позволяет оценить величину пластических сдвиговых деформаций, а значит и степень деформационного упрочнения, увеличивающего сдвиговое напря-
жение s . Коме того, при скоростном резании этот процесс пласти-
ческого деформирования можно считать адиабатическим, когда вся мощность пластических деформаций превращается в плоскости разрыва в тепловую энергию. А предложенная модель позволяет рас-
считывать по (17) и мощность пластических деформаций Wsp , а
значит при известных из эксперимента температурно-механических реологических свойствах оценивать уменьшение s от температур-
ного разупрочнения.
На основе развития данной модели возможно дальнейшее изучение важных закономерностей динамического резания и микрорезания как при скоростном точении, так и при абразивной обработке.
73
УДК 519.8
С.В. Рязанцев, Д.А. Свиридов, Р.И. Сарин
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ МОДЕЛИРОВАНИЯДВУМЕРНЫХ АВТОНОМНЫХ ЦИФРОВЫХ СИСТЕМРЕГУЛИРОВАНИЯ НИЗКОЙ ЧУВСТВИТЕЛЬНОСТИ
Работа посвящена разработке программного обеспечения моделирования и исследования автономных цифровых систем регулирования низкой чувствительности двумерными нестационарными объектами регулирования.
Большинство технологических процессов в различных отраслях промышленности являются многосвязными объектами регулирования (ОР). Наиболее эффективным способом управления ими является использование связных систем автоматического регулирования (САР), рассчитываемых, в том числе с использованием принципа автономности, обеспечивающего независимое регулирование выходных величин [1].
Ключевым этапом синтеза таких САР является расчѐт компенсаторов перекрестных связей, рассчитываемых из условия автономности, требующий полной априорной информации о динамических характеристиках объекта [1]. Отсутствие возможности получения достаточно точного математического описания ОР приводит к невыполнению принципа автономности и, как следствие, к ухудшению качества регулирования.
Один из наиболее эффективных подходов обеспечения требуемых свойств САР в условиях нестационарности динамических свойств объекта заключается в использовании методов теории чувствительности, позволяющих осуществить расчѐт, обеспечивающий выполнение принципа автономности для заданных возможных вариаций параметров модели объекта.
В работе [2] была разработана методика и математическое описание синтеза автономных цифровых систем регулирования (АвЦСР) низкой чувствительности. Ее использование сопряжено с большой вычислительной сложностью. Была поставлена задача разработки на основе предложенной методики прикладного программ-
74
ного обеспечения моделирования и исследования таких систем регулирования для инженеров-проектировщиков АСУТП.
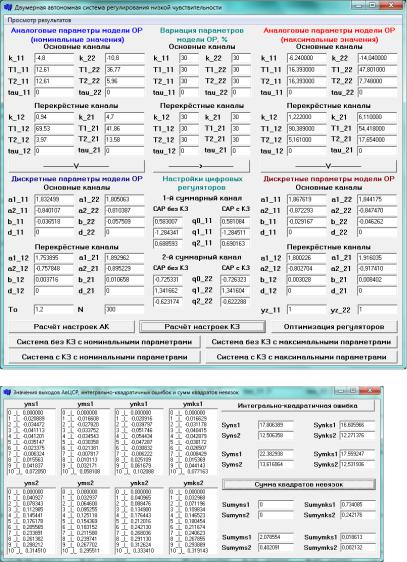
Разработанное программное средство, экранные формы которого представлены на рис. 1, позволяет реализовать все этапы моделирования двумерныхАвЦСР низкой чувствительности:
1.Моделирование корректирующих звеньев, компенсирующих дополнительное движение объекта регулирования, используя заданные номинальные параметры модели нестационарного объекта и их максимально возможные вариации (рис. 1, а)),
2.Моделирование управляющей части АвЦСР низкой чувствительности (компенсаторов перекрестных связей и основных регуляторов) на основе полученного описания обобщенного объекта (математического описания нестационарного ОР, охваченного отрицательными обратными связями с корректирующими звеньями).
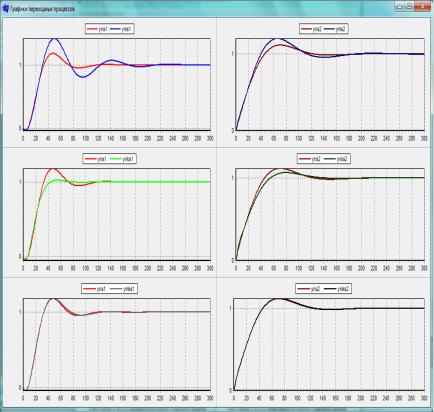
3.Исследование АвЦСР низкой чувствительности: расчет обобщенных показателей качества переходных процессов при различных значениях параметров. Вывод полученных результатов моделирования в численной (рис. 1, б)) и графической (рис. 1, в)) формах.
Разработанное программное обеспечение позволило провести исследование эффективности предлагаемых подхода, методики, алгоритмов, моделей и рассчитанной на их основе АвЦСР низкой чувствительности по сравнению с классическимиАвЦСР [1]. Исследование подтвердило высокую эффективность использования автономных систем регулирования низкой чувствительности.
Литература
1.Кудряшов, В.С. Синтез цифровых систем управления технологическими объектами [Текст]: учеб.пособие / В.С. Кудряшов, В.К. Битюков, М.В. Алексеев, С.В. Рязанцев. Воронеж.гос. технол. акад. Воронеж, 2005 – 336 с.
75
а)
б)
76
в)
Рис. 1. Экранные формы программного средства «Синтез двумерных автономных цифровых систем регулирования низкой чувствительности».
2. Кудряшов В.С., Рязанцев С.В., Свиридов Д.А. Разработка многосвязной автономной цифровой системы регулирования низкой чувствительности / Приборы и системы. Управление, Контроль, Диагностика. – 2014. – № 5 – с.1-11.
Воронежский государственный университетинженерных технологий
77
УДК 621
Е. А. Балаганская
НАЛОЖЕНИЕ ЗАВИСИМОСТЕЙ НА КОНИЧЕСКИЕ КОЛЕСА ПРИПРОЕКТИРОВАНИИВAUTODESKINVENTORPROFESSIO NAL 2014
При проектировании конических зубчатых зацеплений для проверки правильности модели необходимо наглядно показать ее движение. Для этого на механизм надо наложить зависимости, которые управляют его движением. В статье показан пример наложения таких зависимостей в программе AutodeskInventorProfessional 2014
Рассмотрим создание конической пары зубчатых колес в программе AutodeskInventorProfessional 2014.
При проектировании зубчатых конических колес в Мастере Проектирования необходимо сначала задать геометрические параметры, а потом провести геометрический и прочностной расчет. Если пара колес удовлетворяет качеству по геометрическим параметрам и по критериям прочности следует перейти к наглядному представлению движения. Для этого необходимо наложить зависимости, запрещающие определенные перемещения колес в пространстве по отношению к системе координат и по отношению друг к другу.
Сделаем систему координат видимой. На дереве построения открыть папку Начало выделить все нажать на правую кнопку мыши ПКМ Видимость (поставить галочку).
Сбрасываем признак автоматического увеличения границ отображения плоскостей координат. Начало выделить YZ, XZ, XY ПКМ Автозамер(поставить галочку). Если убрать галочку, то рабочие плоскости будут небольшие и не будут загромождать модель.
Далее необходимо отключить базовый признак, иначе мо-
дель будет неподвижной. Конические зацепления ПКМ от-
ключить базовый(убрать галочку).
Перед началом наложения зависимостей в дереве построе-
ния: выделить Коническое зацепление ПКМ Несвязанные компоненты (поставить галочку).
Накладываем зависимости.
78
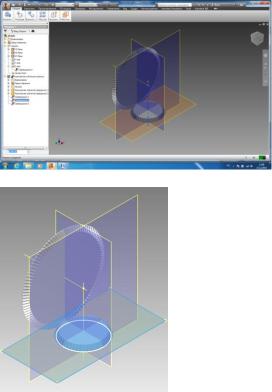
Первая наложенная зависимость дает совмещение грани меньшего (первого) колеса с рабочей плоскостью XY (рис.1). Сборка Зависимости указывается боковая (наружная) грань колеса 1 (перпендикулярная оси колеса) и параллельная ей плоскость системы координат (XY) Применить.
Рис.1. Зависимость «Грань колеса 1 и параллельная ей плоскость системы координат (ХУ)»
Вторая зависимость совмещает ось колеса 1 ось Z системы координат (рис. 2). Сборка Зависимости указывается ось колеса 1 и параллельная ей ось системы координат (Z) Применить.
79
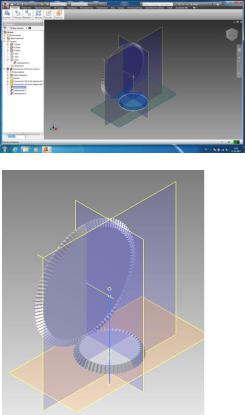
Рис. 2. Зависимость «Ось колеса 1 и параллельная ей осьсистемы координат (Z)»
Теперь колесо 1 закреплено относительно системы координат и вращается. Надо закрепить колесо 2. Для этого наложим зависимость между осью колеса 2 и параллельной ей плоскостью системы координат (рис. 3). Сборка Зависимости, устанавливаем опцию измерения текущего состояния между компонентами (поставить галочку в окошке рассчитать) указывается ось колеса 2 и параллельная ей плоскость системы координат, но перпендикулярная оси колеса 1 (YZ) Применить. Теперь колесо 2 зафиксировано на определенном расстоянии от плоскости YZ.
80